基于競(jìng)爭(zhēng)合作機(jī)制的無(wú)人機(jī)目標(biāo)分配合圍方法
2022-05-30 14:35:09宋澤昊劉冀川
航空兵器 2022年5期
關(guān)鍵詞:無(wú)人機(jī)人工智能
宋澤昊 劉冀川

摘 要:? 無(wú)人機(jī)合圍已經(jīng)成為現(xiàn)代戰(zhàn)爭(zhēng)的重要打擊方式之一。近年來(lái),無(wú)人機(jī)合圍的控制算法得到了廣泛的研究,提高了無(wú)人機(jī)合圍形成編隊(duì)的速度和無(wú)人機(jī)合圍的魯棒性。但這些算法沒(méi)有考慮到傳感器失效對(duì)無(wú)人機(jī)的影響,也沒(méi)有考慮到合圍初期的隊(duì)形收斂速度。針對(duì)這些問(wèn)題,本文提出了一種基于競(jìng)爭(zhēng)合作機(jī)制的無(wú)人機(jī)目標(biāo)分配合圍方法。首先,對(duì)競(jìng)爭(zhēng)機(jī)制進(jìn)行分析,設(shè)計(jì)了基于競(jìng)爭(zhēng)機(jī)制的無(wú)人機(jī)目標(biāo)分配方法,提高了合圍初期的隊(duì)形收斂速度。其次,設(shè)計(jì)了基于合作機(jī)制的無(wú)人機(jī)合圍方法,通過(guò)對(duì)合圍過(guò)程中無(wú)人機(jī)的拓?fù)溥M(jìn)行變換,保證在無(wú)人機(jī)出現(xiàn)探測(cè)失效或通訊失效時(shí)仍然可以獲得目標(biāo)的狀態(tài)信息。仿真驗(yàn)證中,設(shè)計(jì)的方法可以在合圍初期更快形成合圍隊(duì)形,且在發(fā)生通訊失效和探測(cè)失效時(shí)擁有更強(qiáng)的魯棒性。
關(guān)鍵詞: 無(wú)人機(jī);集群;人工智能;競(jìng)爭(zhēng)機(jī)制;合作機(jī)制;合圍;目標(biāo)分配
中圖分類(lèi)號(hào):? TJ765;V279
文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào): 1673-5048(2022)05-0076-07
DOI: 10.12132/ISSN.1673-5048.2022.0055
0 引? 言
近幾年隨著人工智能技術(shù)飛速發(fā)展,無(wú)人系統(tǒng)作戰(zhàn)成為一種重要的作戰(zhàn)方式[1]。對(duì)于空戰(zhàn)部分,無(wú)人機(jī)(Unmannedaerial Vehicle,UAV)成為一種重要的作戰(zhàn)兵種。無(wú)人機(jī)集群在進(jìn)行動(dòng)態(tài)任務(wù)分配時(shí)需要考慮不同的目標(biāo)類(lèi)型,針對(duì)性地指派適合類(lèi)型的無(wú)人機(jī)執(zhí)行任務(wù)。不僅如此,隨著任務(wù)復(fù)雜度的不斷提升,無(wú)人機(jī)集群飛行不再是單一任務(wù)序列的簡(jiǎn)單時(shí)序執(zhí)行過(guò)程,任務(wù)環(huán)境的不確定性要求無(wú)人機(jī)集群可以及時(shí)對(duì)執(zhí)行范圍內(nèi)的突發(fā)情況做出響應(yīng)[2]。
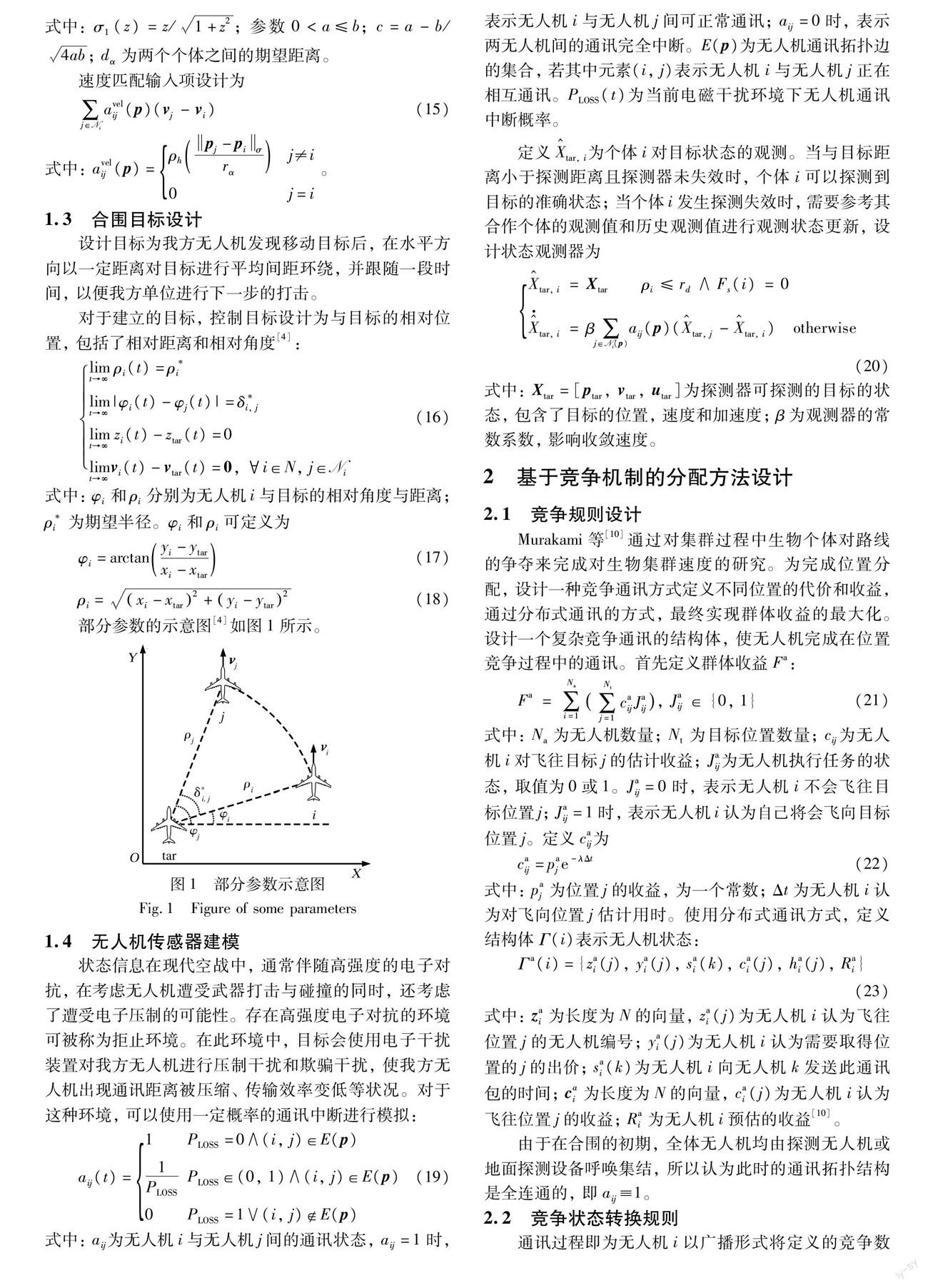
無(wú)人機(jī)協(xié)同合圍是一種重要的無(wú)人機(jī)打擊方式,無(wú)人機(jī)可以進(jìn)行大量投放,在高威脅環(huán)境中執(zhí)行偵察任務(wù)。由于單個(gè)無(wú)人機(jī)的打擊能力較弱,在偵察到敵對(duì)目標(biāo)后,需要多無(wú)人機(jī)進(jìn)行協(xié)同打擊,無(wú)人機(jī)協(xié)同合圍即為協(xié)同打擊的重要一步[3]。由于戰(zhàn)場(chǎng)環(huán)境往往比較復(fù)雜,所以對(duì)無(wú)人機(jī)的智能性和自主性有較高的要求[3];戰(zhàn)場(chǎng)上激烈的電子戰(zhàn)對(duì)合圍控制器有較高的魯棒性要求;合圍目標(biāo)的非合作性對(duì)合圍的收斂有較高的快速性要求。
無(wú)人機(jī)協(xié)同合圍的研究已經(jīng)取得了顯著成果。Vaughan等[4]最早通過(guò)觀察生物的合作與競(jìng)爭(zhēng)機(jī)制來(lái)進(jìn)行合圍研究,并且最終通過(guò)機(jī)器人模仿出了合圍行為。Pierson等[5]考慮了多個(gè)防御者合圍單個(gè)攻擊者的問(wèn)題,假設(shè)其具有單積分器動(dòng)力學(xué)模型,使用矢量場(chǎng)的方法使合圍者在合圍過(guò)程中避碰和避障,最終形成編隊(duì)將攻擊者引導(dǎo)到安全區(qū)域,并將其擴(kuò)展到基于雙積分器動(dòng)力學(xué)模型對(duì)群體攻擊者的合圍控制問(wèn)題。Licitra等[6]考慮單個(gè)合圍智能體對(duì)多個(gè)目標(biāo)的合圍問(wèn)題,使用一種切換系統(tǒng)的方法,合圍者通過(guò)在目標(biāo)之間切換,以滿(mǎn)足某些停留時(shí)間條件,保證最終軌跡的穩(wěn)定性。
國(guó)內(nèi)外學(xué)者對(duì)無(wú)人機(jī)任務(wù)分配的研究也取得了很多成果。梁國(guó)強(qiáng)等[7]建立了WASD任務(wù)分配模型,解決了廣域搜索下的任務(wù)分配問(wèn)題,并使用分層方法解決了大規(guī)模任務(wù)分配問(wèn)題。曹雷等[8]通過(guò)使用拍賣(mài)算法在子群內(nèi)進(jìn)行協(xié)商,提出混合任務(wù)分配方法。可以看出,對(duì)合圍與任務(wù)分配的研究已經(jīng)取得了很多成果,對(duì)目標(biāo)的機(jī)動(dòng)情況和不同收益已經(jīng)有了比較完備的理論,但對(duì)于環(huán)境的考慮仍然較少。
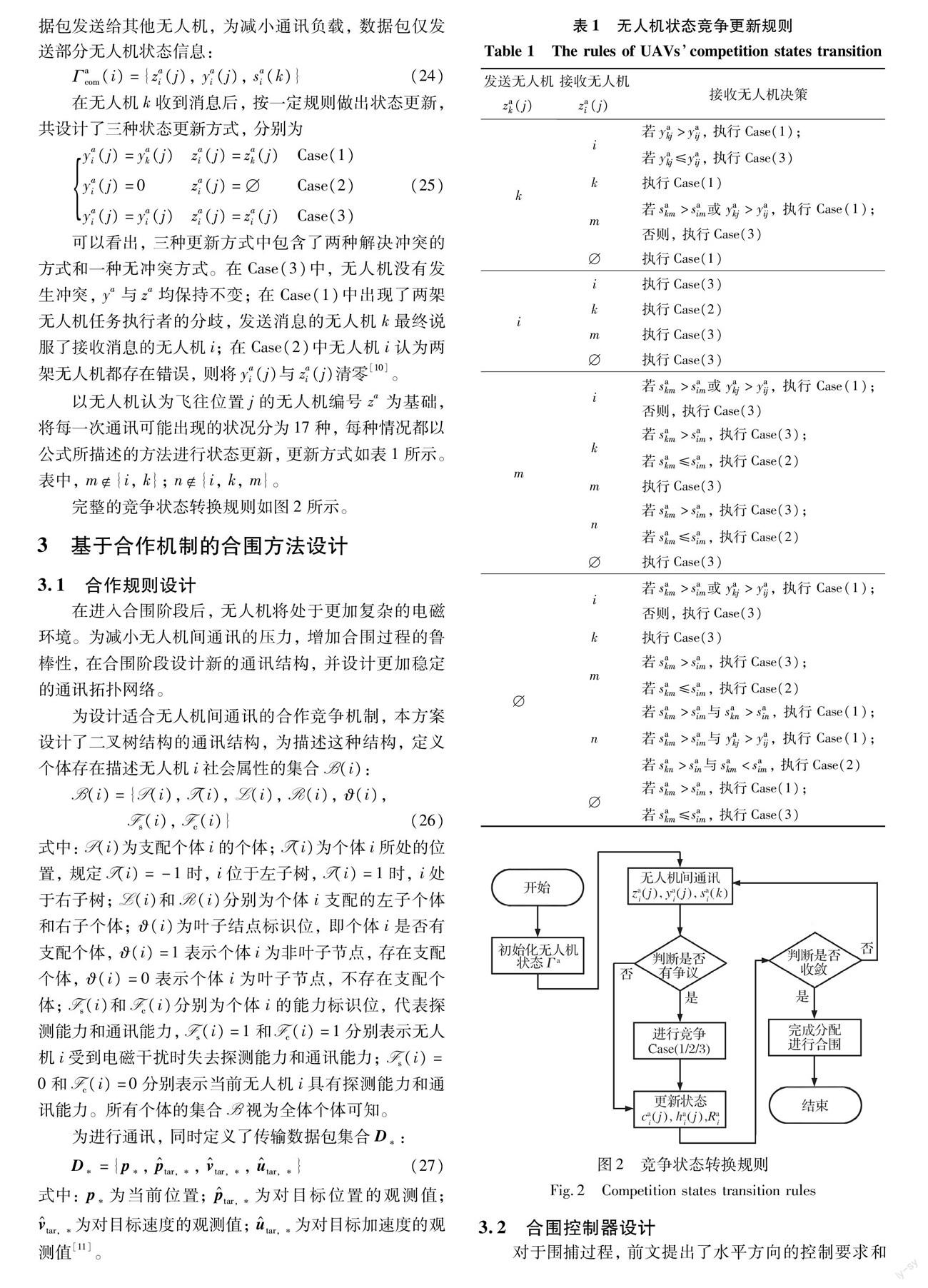
針對(duì)以上問(wèn)題,本文設(shè)計(jì)了一種基于競(jìng)爭(zhēng)合作的無(wú)人機(jī)決策機(jī)制,最終完成了一個(gè)具有干擾環(huán)境下的合圍任務(wù),并與固定拓?fù)涞暮蠂椒ê蛥f(xié)同打擊分配方法進(jìn)行了對(duì)比,說(shuō)明所設(shè)計(jì)方法具有一定優(yōu)勢(shì)。
兩種方法在目標(biāo)轉(zhuǎn)彎過(guò)程的對(duì)比如圖5所示。兩種方法在目標(biāo)進(jìn)行轉(zhuǎn)彎時(shí)均表現(xiàn)出優(yōu)異的性能。本文方法在尺度指數(shù)上占據(jù)微弱優(yōu)勢(shì)。
探測(cè)失效過(guò)程對(duì)比如圖6所示。在此期間,本文使用的方法較對(duì)比方法有巨大優(yōu)勢(shì)。在切換拓?fù)涞倪^(guò)程中,本文方法的序參量小于對(duì)比方法。但是在完成拓?fù)淝袚Q后,本方案的序參量在沒(méi)有震蕩的情況下完成再次收斂,尺度指數(shù)在較小的超調(diào)下完成收斂。對(duì)比方法兩個(gè)指標(biāo)都沒(méi)有完成收斂。
通訊失效過(guò)程對(duì)比如圖7所示。在應(yīng)對(duì)通訊失效的過(guò)程中,本文方法沒(méi)有顯現(xiàn)出巨大的優(yōu)勢(shì),但是本文方法的序參量最終完成了收斂,而對(duì)比方法存在一定的靜態(tài)誤差。
5 結(jié)? 論
在現(xiàn)代空戰(zhàn)的背景下,通過(guò)對(duì)競(jìng)爭(zhēng)合作的機(jī)制分析,分別建立了基于競(jìng)爭(zhēng)機(jī)制的合圍位置分配和基于合作機(jī)制的合作合圍通訊方式,最終完成了一個(gè)合圍仿真實(shí)驗(yàn),并與另一種方法進(jìn)行對(duì)比。在初始分配、 探測(cè)失效和通訊失效三種過(guò)程中,提出的方法具有一定的性能優(yōu)勢(shì)。通過(guò)對(duì)競(jìng)爭(zhēng)過(guò)程的設(shè)計(jì),加快了合圍初期的收斂速度,通過(guò)對(duì)合作方式的設(shè)計(jì),增強(qiáng)了合圍過(guò)程的魯棒性。
參考文獻(xiàn):
[1] 盧志剛,? 張?jiān)溃? 王虎躍,? 等. 地面無(wú)人系統(tǒng)編組作戰(zhàn)的指揮與控制智能化[J]. 指揮與控制學(xué)報(bào),? 2021,? 7(4): 350-358.
Lu Zhigang,? Zhang Yue,? Wang Huyue,? et al. Intelligence of Command and Control in Formation Operation of Unmanned Ground Systems[J]. Journal of Command and Control,? 2021,? 7(4): 350-358.(in Chinese)
[2] Davis D T,? Chung T H,? Clement M R,? et al. Consensus-Based Data Sharing for Large-Scale Aerial Swarm Coordination in Lossy Communications Environments[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016: 3801-3808.
[3] 胡喬林,? 焦士俊,? 劉劍豪,? 等. 反美軍無(wú)人機(jī)蜂群作戰(zhàn)問(wèn)題研究[J]. 飛航導(dǎo)彈,? 2021(12): 88-92.
Hu Qiaolin,? Jiao Shijun,? Liu Jianhao,? et al. Research on Anti US Drone Swarm Warfare[J]. Aerodynamic Missile Journal,? 2021(12): 88-92.(in Chinese)
[4] Vaughan R,? Sumpter N,? Henderson J,? et al. Experiments in Automatic Flock Control[J]. Robotics and Autonomous Systems,? 2000,? 31(1/2): 109-117.
[5] Pierson A,? Schwager M. Controlling Noncooperative Herds with Robotic Herders[J]. IEEE Transactions on Robotics,? 2018,? 34(2): 517-525.
[6] Licitra R A,? Bell Z I,? Doucette E A,? et al. Single Agent Indirect Herding of Multiple Targets: A Switched Adaptive Control Approach[J]. IEEE Control Systems Letters,? 2018,? 2(1): 127-132.
[7] 梁國(guó)強(qiáng),? 康宇航,? 邢志川,? 等. 基于離散粒子群優(yōu)化的無(wú)人機(jī)協(xié)同多任務(wù)分配[J]. 計(jì)算機(jī)仿真,? 2018,? 35(2): 22-28.
Liang Guoqiang,? Kang Yuhang,? Xing Zhichuan,? et al. UAV Coope-rative Multi-Task Assignment Based on Discrete Particle Swarm Optimization Algorithm[J]. Computer Simulation,? 2018,? 35(2): 22-28.(in Chinese)
[8] 曹雷,? 譚何順,? 彭輝,? 等. 一種多UAV混合動(dòng)態(tài)任務(wù)分配方法[J]. 南京理工大學(xué)學(xué)報(bào),? 2015,? 39(2): 206-214.
Cao Lei,? Tan Heshun,? Peng Hui,? et al. Mixed Dynamic Task Allocation for Multiple UAV[J]. Journal of Nanjing University of Science and Technology,? 2015,? 39(2): 206-214.(in Chinese)
[9] Olfati-Saber R. Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory[J]. IEEE Transactions on Automatic Control,? 2006,? 51(3): 401-420.
[10] Murakami H,? Niizato T,? Gunji Y P. Emergence of a Coherent and Cohesive Swarm Based on Mutual Anticipation[J]. Scientific Reports,? 2017,? 7: 46447.
[11] Dong X W,? Li Y F,? Lu C,? et al. Time-Varying Formation Tracking for UAV Swarm Systems with Switching Directed Topologies[J]. IEEE Transactions on Neural Networks and Learning Systems,? 2019,? 30(12): 3674-3685.
[12] Han T,? Chi M,? Guan Z H,? et al. Distributed Three-Dimensional Formation Containment Control of Multiple Unmanned Aerial Vehicle Systems[J]. Asian Journal of Control,? 2017,? 19(4): 1-11.
[13] 陳清陽(yáng),? 辛宏博,? 王玉杰,? 等. 一種多機(jī)協(xié)同打擊的快速航跡規(guī)劃方法[J/OL]. 北京航空航天大學(xué)學(xué)報(bào),? 2022.https:∥www.cnki.com.cn/Article/CJFDTotal-BJHK20210514000.htm.
Chen Qingyang,? Xin Hongbo,? Wang Yujie,? et al. A Rapid Path Planning Method for Multiple UAVs to Cooperative Strike[J/OL]. Journal of Beijing University of Aeronautics and Astronautics,? 2022.https:∥www.cnki.com.cn/Article/CJFDTotal-BJHK20210514000.htm..(in Chinese)
Target Assignment and Multi-UAV Enclosing Method
Based on Competition and Cooperation Mechanism
Song Zehao1,Liu Jichuan2, 3*
(1. School of Automation Science and Electrical Engineering,Beihang University,Beijing 100183,China;
2. School of Electronic Engineering,Xidian University,Xian 710071,China;
3. Hebei Key Laboratory of Electromagnetic Spectrum Cognition and Control,
The 54th Research Institute of CETC,Shijiazhuang 050081,China)
Abstract: Multi-UAV enclosing has become one of the important attack methods in modern air combat. Recently,? the algorithms of multi-UAV enclosing have been extensively studied to improve the formation speed of? multi-UAV enclosing and improve the robustness. However, these algorithms fail to consider the impact of? sensor failure on? UAV,? nor do consider the formation convergence speed at the initial stage of? multi-UAV enclosing. Aiming at these problems,? a method of multi-target assignment and multi-UAV enclosing based on competition and cooperation mechanism is proposed.Firstly,? the competition mechanism is analysed,? and the multi-target assignment method based on the competition mechanism is designed to improve the formation convergence speed.Secondly,? a multi-UAV enclosing method is designed based on the cooperation mechanism.The method transforms the topology of the UAV to obtain the formation when the detection failure or communication failure happens. In the simulation,? the? designed method can form the enclosing formation faster,? and has stronger robustness when the detection failure or communication failure happens.
Key words: UAV;cluster;artificial intelligence;competition mechanism;cooperation mechanism; enclosing;target assignment
收稿日期: 2022-03-20
作者簡(jiǎn)介: 宋澤昊(1996-),? 男,? 黑龍江齊齊哈爾人,? 碩士研究生。
通信作者: 劉冀川(1981-), 男, 河北保定人, 高級(jí)工程師。
猜你喜歡
西安航空學(xué)院學(xué)報(bào)(2022年2期)2022-07-04 07:45:42
商界(2019年12期)2019-01-03 06:59:05
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
人間(2016年26期)2016-11-03 17:52:40
中國(guó)科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
南風(fēng)窗(2016年19期)2016-09-21 16:51:29
南風(fēng)窗(2016年19期)2016-09-21 04:56:22
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
