逆變器非線性運行的同步電動機無源性控制研究*
2011-12-12 01:41:06谷善茂馬良河
濰坊學院學報 2011年6期
谷善茂,馬良河
(濰坊學院,山東 濰坊 261061)
逆變器非線性運行的同步電動機無源性控制研究*
谷善茂,馬良河
(濰坊學院,山東 濰坊 261061)
通過嚴格的理論分析和數學計算,建立了同步電動機在同步坐標系中E-L方程形式的數學模型,給出了磁場矢量控制的基本控制目標。以這些模型為基礎,研究并設計了在負載轉矩為任意時變未知情形下同步電動機時變轉矩(轉速、位置)的無源性漸近跟蹤控制器。在實現機械控制目標的同時考慮并實現了對磁場方向和磁場幅值的控制,即同時實現了磁場矢量控制。
同步電動機;無源性控制;漸近跟蹤;負載轉矩
1 引言
無源性是系統的一種跟輸入輸出相關聯的重要性質。粗略的解釋就是如果一個系統的能量總是小于或等于初始時刻系統所具有的能量與外部提供的能量之和,則表明系統只從外部吸收能量,而系統本身并不產生能量,則稱系統是無源的。無源性是與系統的穩定性緊密相關的一個重要概念,雖然無源性并不等同于系統的穩定性,但是如果系統是無源的,通過輸出反饋就可以實現閉環系統的漸近穩定[1-2]。
交流電動機的無源性控制是Romeo Ortega等人[3]從機器人控制的研究中受啟發發展起來的。他們通過對電機的E-L(Euler-Lagrange)方程的分析入手,將整個電機系統分解為電氣和機械兩個子系統,使電氣子系統嚴格無源化,將機械系統看作電氣子系統的無源性干擾,根據無源性與穩定性的關系,這樣就能保證整個電機系統的全局穩定性。
該方法由于從電機的能量方程入手,使得系統的控制律具有明確的物理意義,使自動控制專家的理論分析更容易,也便于電氣工程師們理解和應用。特別是通過對感應電動機的研究發現,系統能夠實現控制的簡化,能夠找到不影響穩定性的無功力的存在。特別是在定子坐標下,系統的反饋不需要觀測器,直接利用輸出反饋就可以實現系統的全局穩定性[4],同時在一定的假設和條件下無源性控制就變為間接磁場定向控制。
2 同步電動機(d,q)坐標系的E-L方程
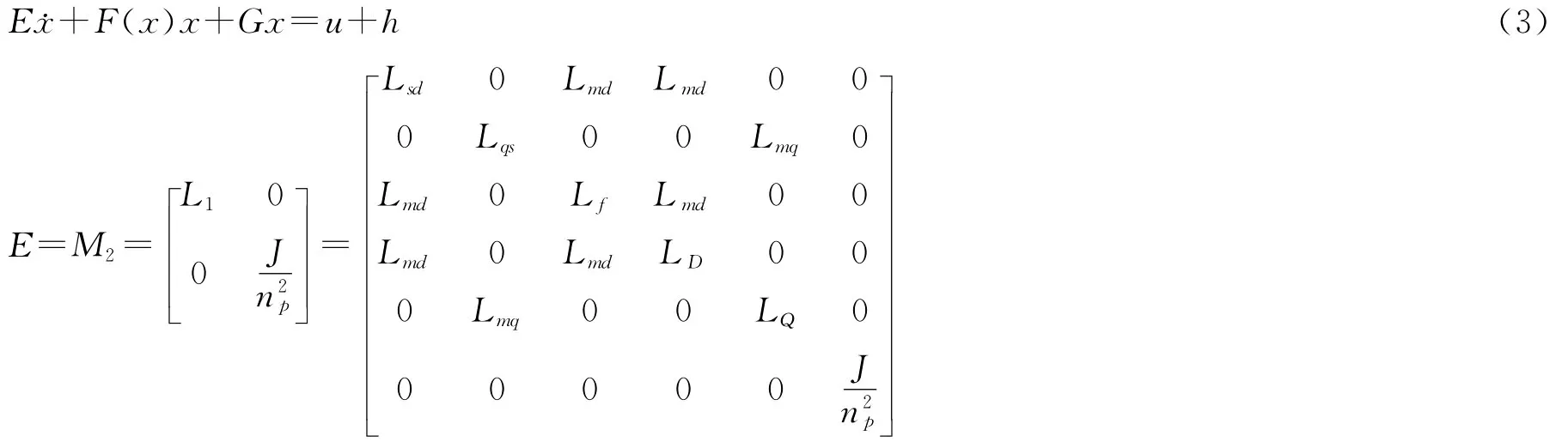
同步電機在同步坐標系中的E-L方程如下:

矩陣ωM3+M4不是反對稱的,但是可以按下式等價于反對稱矩陣F(x)

其中,F(x)是反對稱矩陣。

因此,方程(1)等價于方程
3 逆變器的非線性模型
電機的非線性特性已經在電機模型中得到了體現,為了提高整個調速系統的性能,必須考慮逆變器的非線性[5]特性的影響。為了研究逆變器的非線性效應的影響,逆變器的輸入輸出模型可以用下列連續分段線性函數表示[5]

其中,u(t),ν(t),分別為逆變器的一相輸入輸出電壓;θi是正的常數,依賴于逆變器的實際參數,如中間直流電壓、調制頻率、死區時間以及功率器件開通關斷時間等;由于各種逆變器的實現方法不同,同時為避免參數的確定,一般假設θi在某一數值附近波動。sgn(i(t))為一相電流i(t)的不連續函數,可通過檢測定子電流的方向獲得。
例如,在仿真時,取逆變器的參考模型為:

δij的變化范圍分別為:

4 控制器設計
假設定子電流、轉子勵磁電流、轉子轉速都可以準確測量[6-8]。根據下列方程設計期望軌跡


負載轉矩估計器為

式中,k7>0為反饋增益系數。
設計無源性控制器的控制變量為

則只要控制系數k1,k2,k3選取合適(適當大),這樣設計的控制器一定能實現對轉矩的漸近跟蹤控制和對轉子磁場矢量的漸近控制。
一般而言,因為轉子阻尼繞組電流x4,x5不可測量,跟蹤誤差e4,e5無法得到。所以常取k4,k5=0。
控制器結構見圖1,基于這種控制器的電氣傳動系統的結構見圖2。其中,符號SM表示同步電動機,DCS表示直流電源,PBC表示無源性控制器,rotor excite表示勵磁電源。
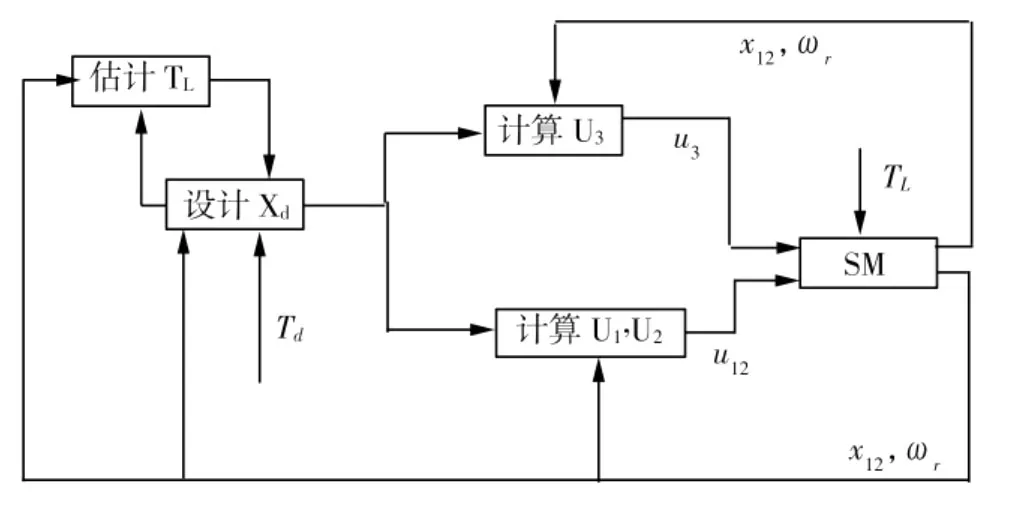
圖1 無源性控制器的結構

圖2 無源性控制器的電氣傳動系統結構
5 仿真
仿真中,考慮了負載轉矩的下列四種情況
(1)恒值型負載:TL=8
(2)周期型負載:TL=5+5sin(10t)
(4)斜坡型負載:TL=3+3·t
期望轉矩由給定期望轉速x6=500+10sin(5t)生成,取期望轉子磁場幅值為M=5。經多次仿真實驗,得到近似最優的反饋系數為:

應用Matlab/Simulink仿真,在以上各情形下的仿真結果見圖3-圖12。在仿真曲線中,符號MM表示轉子磁鏈幅值;TL、TL1分別表示負載轉矩及其估計值;Te、Td分別表示電磁轉矩和期望轉矩;x6、x6d分別表示實際轉速和期望轉速。
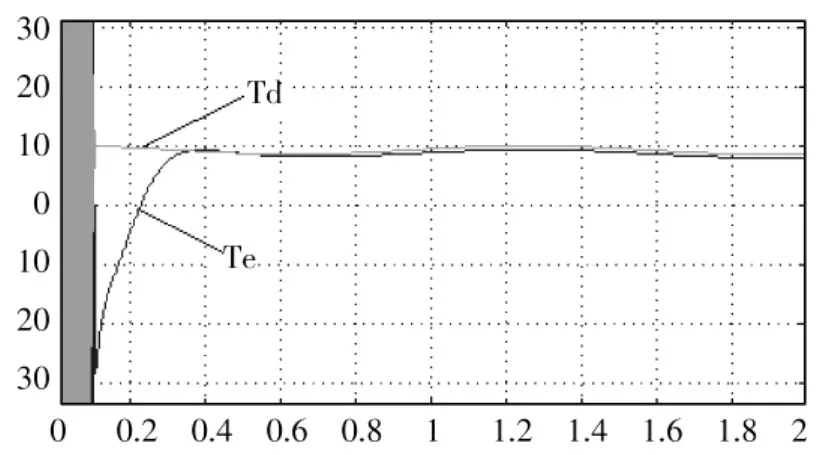
圖3 情形1的期望轉矩跟蹤曲線

圖4 情形2的期望轉矩跟蹤曲線

圖5 情形3的期望轉矩跟蹤曲線
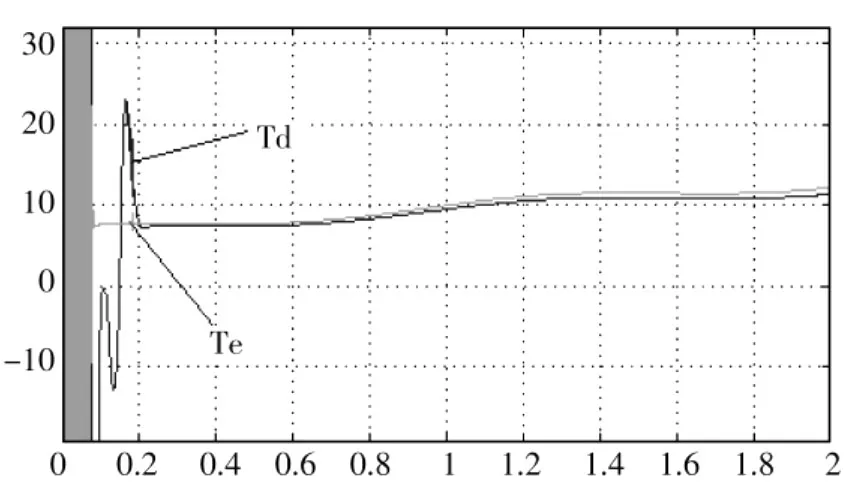
圖6 情形4的期望轉矩跟蹤曲線

圖7 情形1/2/3/4)的轉子磁場控制曲線

圖8 情形1的負載轉矩估計曲線

圖9 情形2的負載轉矩估計曲線
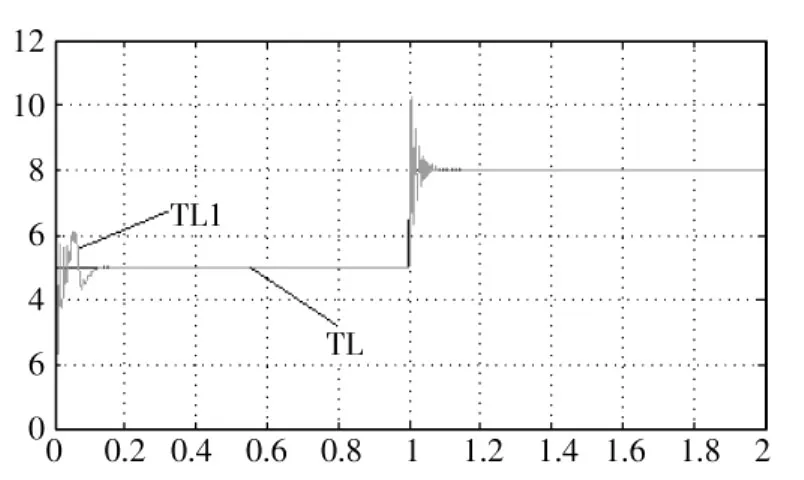
圖10 情形3的負載轉矩估計曲線
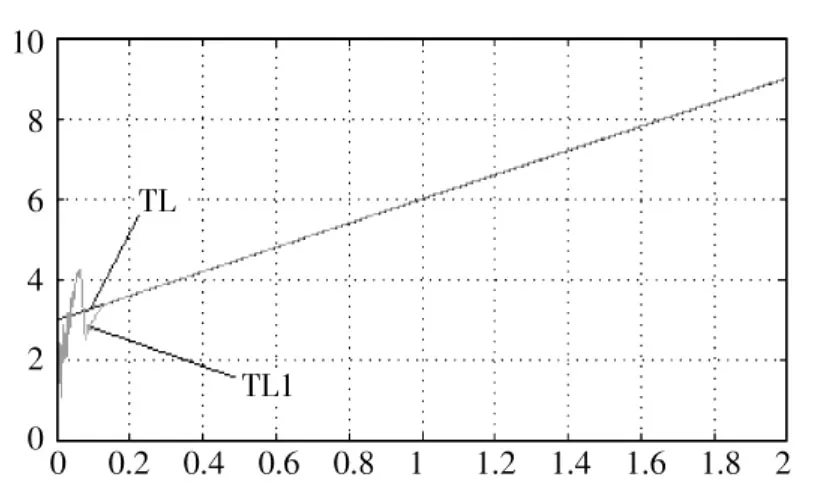
圖11 情形4的負載轉矩估計曲線

圖12 情形1/2/3/4)的轉速跟蹤曲線
由這些仿真曲線可以看出,對于負載轉矩的不同情況,對期望轉矩的跟蹤性能都非常好,具有很快的跟蹤速度和很小的跟蹤精度,只要參數選擇合適,可以使靜誤差非常小。從而證明了這種控制器具有很高的控制性能和魯棒性。由仿真曲線看出,對負載轉矩的估計很好,幾乎沒有靜態誤差,對轉子磁場矢量控制的結果也很好。在對期望轉矩的跟蹤控制上,靜態誤差很小,但是在過渡過程中有較大幅度的振蕩,這可能主要與初始值的設置有關,也可能受控制器系數非最優性的影響。
6 結論
同步電動機的無源性控制器可以用來實現轉速的跟蹤控制和轉子位置的跟蹤控制,而且具有很高的控制性能;對于實際系統中逆變器的非線性效應,這種無源性控制器同樣可以保持高性能的控制效果和魯棒特性,同時,這種無源性控制器關于負載轉矩也具有很高的魯棒性能。另外的仿真實驗還證明,基于轉子磁場矢量控制方式的控制器都可以很好地實現轉速和位置的跟蹤控制,具有很高的動態控制性能和魯棒特性。
[1]Qin H S,Hong Y G.Passivity,stability and optimality[J].控制理論與應用,1994,11(4):421-427.
[2]陳伯時.電力拖動自動控制系統[M].北京:機械工業出版社,2003.
[3]Ortega R,Jiang Z P,Hill D J.Passivity-based control of nonlinear systems:A tutorial[J].Proceedings of the American control conference,1997,5:2633-2637.
[4]李偉.感應電機的非線性控制研究[D].廣州:華南理工大學,2002.
[5]Zhu G,Dessaint L A,Akhrif O,et al.Speed tracking control of a permanent magnet synchronous motor with state and load torque observer[J].IEEE Trans,2000,47(2):346-355.
[5]陳峰,徐文立.基于無源性的同步電動機控制器設計[J].電機與控制學報,1998,2(4):217-220.
[7]Hossam A,Fattah A,Kenneth A.Speed control of electrical machines:unknown load torque case[J].IEEE on A C,2001,46(12):1979-1983.
[8]Cecati C,Rotondale N,Torque and speed regulation of induction motors using the passivity theory approach[J].IEEE transactions on industrial electronics,1999,46(1),119-127.
(責任編輯:肖恩忠)
Passivity Control Research of Synchronous Motor under Nonlinear Inverter Power Supply
GU Shan-mao,MA Liang-he
(Weifang University,Weifang 261061,China)
By strict analysis and calculation,the same two types of synchronous motor models as induction motors are established in various reference coordinates.Based on the established model in the synchronous rotating coordinates,the passivity based controller of synchronous motor is designed in case of time-varying and unknown load torque.In order to carry out the torque(rotor velocity and rotor position)tracking control,the magnetic amplitude and angle asymptotic tracking control are established simultaneously.
synchronous motor,passivity based control,asymptotic tracking control,load torque
2011-07-28
谷善茂(1978-),男,山東濰坊人,濰坊學院信息與控制工程學院講師,博士。研究方向:電力電子與電力傳動,同步機無傳感器控制策略。
TM341 文獻標識碼:A 文章編號:1671-4288(2011)06-0121-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
