海洋平臺鋼懸鏈線立管安裝監測技術研究
2011-12-11 02:47:26李麗瑋
石油礦場機械 2011年8期
李麗瑋,何 寧,王 輝
(1.中國石油大學機械與儲運工程學院,北京102249;2.海洋石油工程股份有限公司工程技術中心,天津300452) ①
海洋平臺鋼懸鏈線立管安裝監測技術研究
李麗瑋1,何 寧2,王 輝2
(1.中國石油大學機械與儲運工程學院,北京102249;2.海洋石油工程股份有限公司工程技術中心,天津300452)①
為在深海復雜工況下把平臺立管安裝到位,需對安裝過程進行監測。綜合考慮船舶位移、升沉補償、立管吊裝變形,以聲納和遠程操作潛水器(ROV)監測系統為技術支撐,監測管線著陸區位置、懸鏈線形態、以及海底地形等參數,指導立管的安裝過程。形成一套完善的鋼懸鏈線立管安裝監測技術,促進我國深海石油的發展。
海洋平臺;立管;安裝;監測
1994年,殼牌公司在墨西哥灣872m水深的張力腿平臺上安裝了世界上第1條鋼懸鏈線立管,至今已經有數十條鋼懸鏈線立管在墨西哥灣、巴西坎普斯灣、北海、挪威海、印度海和西非投入使用。鋼懸鏈線立管集海底管線與立管于一體,一端連接井口,另一端連接浮式結構,無須海底應力連接頭或是柔性接頭的連接,極大降低了水下施工量和難度[1]。由于在深水環境中存在很多不確定因素,管線會受到來自自身的重力、風、波浪力、海流作用以及上部附體運動產生的載荷,從而發生疲勞破壞、扭曲等狀況,如圖1所示。因此要對整個立管的安裝過程進行實時監測,以保證成功地安裝整個立管。為了適應不同水深的需要,鋼懸鏈線立管出現了不同的結構形式,本文以簡單懸鏈線立管(Simple Catenary Riser)為例(如圖2所示),研究鋼懸鏈線立管(SCR)的安裝監測技術。

圖1 立管發生破壞與扭曲

圖2 鋼懸鏈線立管
1 監測方法
立管在位時,常規的檢測與監測主要是指對SCR懸掛區域應力狀態、著陸點應力狀態以及海流流速分布的監測[2]。主要的監測方法是在鋪管前,把監測所用到的傾斜計、應變測量儀、加速度計以及海洋環境測量儀器等監測設備安裝固定在工程船以及管線上,監測數據通過連接電纜傳送到平臺上的總控制室中,監測人員根據不同情況下立管的響應對立管形態做出評估。立管安裝監測存在的技術難題是:立管形態及著陸點位置會隨著安裝過程的進行發生不斷的變化,給實時精確監測帶來一定難度。由于管線在深水環境中受多重因素影響,安裝過程中更會發生多種復雜的響應。
本文從3個方面介紹立管的安裝監測過程,即海洋環境,船舶的運動與位置,立管的鋪設與吊裝。立管鋪設過程需要監測管道在托管架處受力、立管著陸點位置以及懸鏈線的形態與位置,立管吊裝過程同樣也需要監測立管著陸點以及懸鏈線的形態與位置。根據以上的簡單敘述,遵循以下思路對立管實時監測,即采用DP系統以及聲納監測系統,對一系列對象實施監測,實時獲得船舶運動情況與位置、著陸區位置、懸鏈線形態、海底地形等重要參數,并進一步分析懸鏈線三維模型,就此實時模型與預先規定的理論數據進行對比,進而完善模型,及時調整安裝過程,避免不必要的損失。
2 監測對象
沿著陸點(TDP)的應力分布復雜,更大程度上依賴于土壤性能和立管——海床相互作用[3]。準確確定立管應力集中的立管著陸點位置很困難,該位置隨著船舶位置、立管溝和洋流的改變而改變。船舶位置不僅依賴于選定的位置,還由環境條件(例如,波浪、洋流和風速)決定。因此極端事件,例如風暴或高洋流中TDP的位置可能與其他位置明顯不同[3]。
2.1 海洋環境
立管安裝須進行海洋環境的監測,例如風、浪、流等情況,避免在惡劣的天氣下進行管線鋪設,最大限度地保證管線鋪設過程中的成功。環境參數包括風速、波速、流速及他們的方向,以及海床的情況。
對于海洋環境監測,在立管安裝之前把一系列的海洋環境監測系統(如圖3)安裝完畢,安裝過程中,海洋環境監測系統將監測到的風速、風向、溫度、空氣濕度、海流速度和方向、海水溫度、表層流等環境參數不斷地傳輸到鋪管船上的總控制室,并分析處理這些數據,工作人員根據獲得的有效環境信息對立管安裝過程做出準確及時評估,確保立管順利安裝。

圖3 海洋環境監測系統界面
2.2 船舶
深水管線安裝需要使用具有動態定位功能的安裝船,其定位系統使用了一個高精度的GPS內部位置傳感器,可以用來監測整個船舶的橫搖、縱搖、垂蕩以及3個方向的轉角,從而繪制出船舶高精度的3D位置圖形。動態定位系統(DP)(如圖4)結合了船舶位置、鋪設裝備參數、立管的特性以及海底鋪設軌道地形等數據,由于海上常有不可預測的海況發生,因此必須加強對動態系統的監測,以便在船體位移發生變化、不利于鋪管時能及時調整鋪管過程。
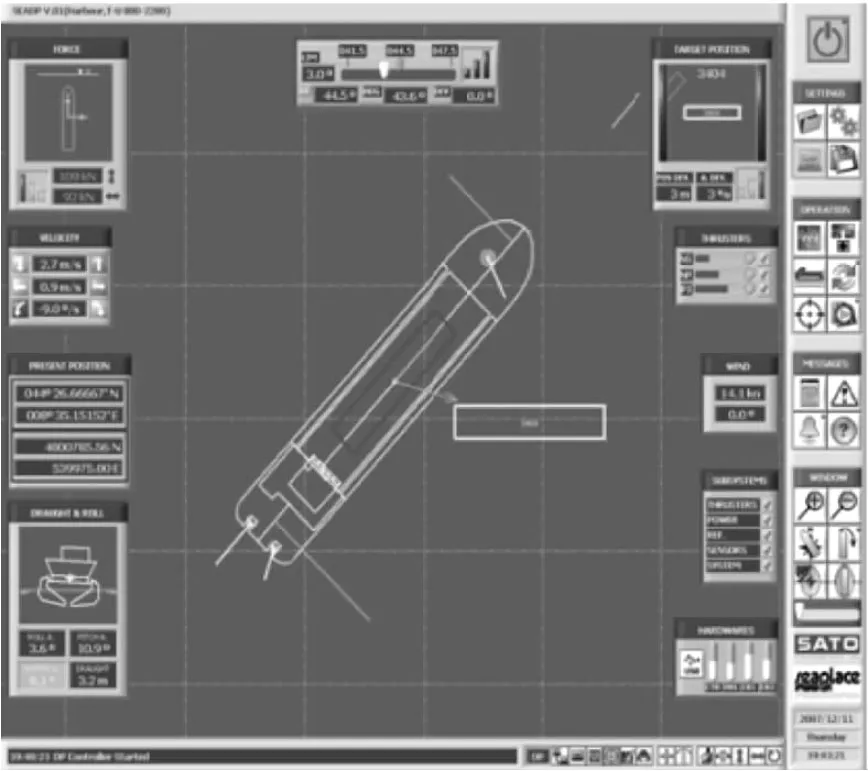
圖4 動態定位系統
2.3 著陸點與懸鏈線
立管的鋪設與吊裝過程中,由于管線與海床的接觸,在著陸點(TDP)處很容易發生疲勞、扭曲、碰撞等情況[2],因此必須對立管TDP處的形態與位置加以監測。并且由于在安裝過程中,TDP的位置是時刻變化的,所以增加了TDP載荷監測的難度。同時,為了保證立管按照嚴格預定的位置鋪設與安裝,并且不對管道過載加壓進而損壞管道[2],還應時刻監測懸鏈線的形態與位置。TDP與懸鏈線形態與位置的監測由遠程操作潛水器(ROV)和海底鋪管聲納監測系統(PLS)共同完成。TDP處主要監測立管的位移、張緊力以及與海床的接觸等情況。因此當強大的流動突然發生時安裝船能夠具備快速的反應能力,及時對安裝操作情況做出修正,以確保立管順利鋪設與吊裝。圖5表示的是立管的TDP及懸鏈線形態。

圖5 TDP與懸鏈線形態
2.4 托管架
在立管鋪設過程中應重視對托管架的監測,主要是監測管線在托管架上的應變及偏離角,如圖6所示。在S型鋪管過程中,管道的焊接和焊縫檢測是在鋪管船上以水平方式進行的,之后通過張緊器到達船尾的托管架,由于受到自身管線的重力作用,管線在鋪設過程中會形成一定的弧度。管道從鋪管船到海床的整體形態成懸鏈線狀[4]。

圖6 S型鋪管船托管架
3 安裝監測實施辦法
采用DP系統以及聲納監測系統,對一系列對象實施監測,實時獲得船舶運動與位置、著陸區位置、懸鏈線形態、海底地形等重要參數,并進一步分析獲得安裝船以及懸鏈線的三維模型,就此實時模型與預先規定的理論數據進行對比,進而完善模型,調整安裝過程,避免不必要的損失。另外,在遇到突發情況時,該監測系統顯得尤為重要。
在立管安裝過程中采用2個ROV協助工作,其中1個ROV對安裝過程中時刻變化的TDP和海底地形進行實時監測,ROV由輔助船協助操作。另外1個ROV作為鋪管聲納監測系統(PLS)(如圖7)的承載平臺,由1根臍帶纜連接到安裝船上,構成聲納ROV監測系統(如圖8)對立管安裝過程中懸鏈線形態、TDP進行實時監測。
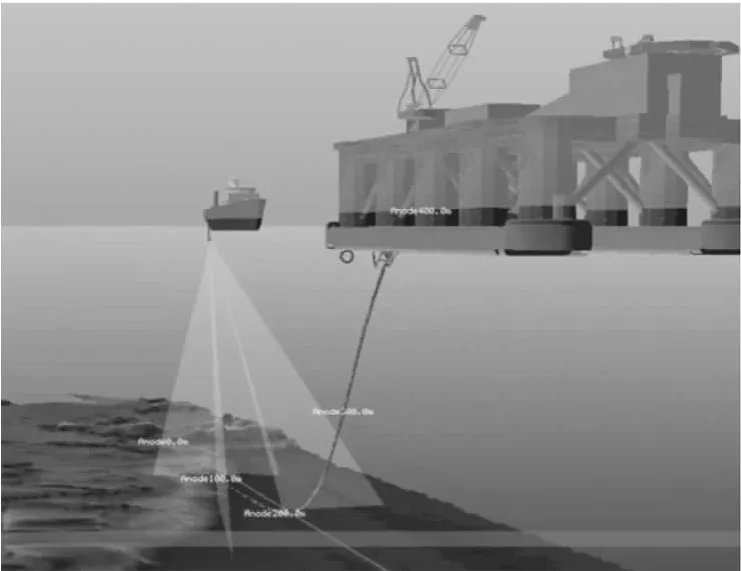
圖7 鋪管聲納監測系統

圖8 聲納ROV監測系統
3.1 立管鋪設監測
ROV對管道進行監測時,船舶上顯示監測結果,工作人員據此及時了解海底管道的情況。圖9為立管鋪設過程中的監測示意圖。
立管鋪設與吊裝過程中,聲納ROV監測系統實時監測鋪管船與海床之間的立管的形態、海底地形以及著陸區情況,如圖10所示。安裝過程開始時,安裝在鋪管船下方ROV平臺上的電波掃描聲納傳感器開始監測船舶與海床之間的管道;聲納傳感器裝置的發射單元發射聲信號,檢測從立管反應得到的信號;聲納傳感器裝置的接受單元處理反饋信號并通過臍帶光纜傳輸信號到操作平臺,獲得立管的三維模型,從而檢查懸鏈線的形態是否出現異常,并且確定立管著陸區的位置[5]。

圖9 立管鋪設監測

圖10 海底畫面
3.2 立管吊裝監測
鋪管過程結束后,安裝船吊裝立管到平臺,圖11為立管吊裝過程中的監測,表示工作ROV(如圖12)與聲納ROV監測系統共同監測立管。聲納系統通過獨特的聲波操控功能向管道懸鏈線多重目標同時發射信號脈沖,獲得船體運動與位置、TDP的形態與位置以及懸鏈線的位置等數據,這些數字化的目標信息不停地反饋到數據庫中,通過比較提煉到一個實時的三維模型中,因此得到一個隨著管道鋪設操作進程不斷實時校正的“著陸點”,著陸點不斷實時地根據管道鋪設操作進程進行校正。

圖11 立管吊裝監測

圖12 工作ROV
4 結論
1) 通過對國內外監測技術的研究,結合環境、船舶運動、立管鋪設與吊裝3方面因素,提出了鋼懸鏈線立管安裝時的監測技術,能有效地控制各種隨機因素,保證立管安裝過程的順利進行。
2) 立管監測技術是基于立管在位時的靜態監測,安裝過程實時監測技術并未成熟。本文首次提出了聲納ROV監測技術,在立管鋪設與吊裝過程中實時監測懸鏈線形態、TDP位置、海底地形等安裝參數。
3) 實時監測技術對安裝過程中立管所受的應力與應變的監測存在一定的局限性。
4) 鋼懸鏈線立管逐漸成為深海石油平臺立管發展的主趨勢,聲納ROV監測技術對解決鋼懸鏈線立管安裝過程中的技術難題起到一定幫助。
5) 本文所做研究未與試驗相結合,對安裝過程中立管自身強度的研究相對保守。
[1] 王 毅,段夢蘭,李麗娜,等.深水立管安裝技術進展[J].石油礦場機械,2009,38(6):5-8.
[2] Roderick Y E,Scientific M S,Craig R C,et al.Load Monitoring at the Touchdown Point of the First Steel Catenary Riser Installed in a Deepwater Moored Semisubmersible Platform[G].Offshore Technology Conference,Houston,USA:OTC,1999.
[3] Metin Karayaka,Ph D.Steel Catenary Riser Response Characterization With on-Line Monitoring Devices[G].International Conference on Offshore Mechanics and Arctic Engineering.Honolulu,Hawaii,USA:OMAE,2009.
[4] Dominique Perinet,Acergy France,Ian Frazer,et al.Strain Criteria for Deep Water Pipe Laying Operation[G].Offshore Technology Conference.Houston,USA:OTC,2008.
[5] David A M.Subsea pipeline touchdown monitoring[G].United States,Patent Application Publication,US 2004/0013471A1.Jan.22,2004.
Monitoring Technology of Installation of Offshore Platform Steel Catenary Riser
LI Li-wei1,HE Ning2,WANG Hui2
(1.College of Mechanical and Transportation Engineering,China University of Petroleum,Beijing102249,China;2.Engineering Technology Center,COOEC,Tianjin300452,China)
On the basis of complex natural environment,this paper researchs vessel motion,heave compensation of ship location and riser shape while laying and lifting.With the main ponit-ROV sonar monitoring system,study around touch down point of pipeline,steel catenary riser shapes and seabed topography were made.And then these paraments to guide analysis of riser installation process was used.Finally complete monitoring technologies for steel catenary riser installation was formed,to provide technical support for the development of offshore oil and innovation of monitoring technology for riser installation in China.
offshore platform;riser;installation;monitor
1001-3482(2011)08-0019-05
TE95
A
2011-02-23
國家高技術研究發展計劃(863計劃)“深水海底管道鋪設技術”(2006AA09A105)
李麗瑋(1986-),女,河北衡水人,碩士研究生,主要從事安全檢測與監測、海洋立管方面的研究,E-mail:weiweidaolai1986@126.com。