蘇聯/俄羅斯的空間交會對接技術
2011-12-07 05:14:16邊廣龍
太空探索 2011年10期
□ 邊廣龍
目前,在世界空間交會對接技術領域處于領先地位的是俄羅斯和美國。蘇聯/俄羅斯是世界上進行航天器空間交會對接最多的國家,其對接形式也多種多樣,有無人飛船與無人飛船的對接,有載人飛船、 無人飛船與空間站的對接,以及空間站模塊艙間的交會對接和組裝等。蘇聯/俄羅斯在航天器的空間交會對接中積累了豐富的成功經驗,也有不少失敗的教訓,很值得借鑒。
首次自動對接
1967年10月30日,蘇聯先后發射了兩艘不載人的“聯盟”號飛船——“宇宙”186、188,成功進行了世界上第一次無人航天器自動交會對接。其中宇宙186為追蹤航天器,“宇宙”188為目標航天器。它們采用“針”模擬測量系統和無通道的“桿-錐”對接機構。
1967年10月27日,具有空間機動能力的宇宙-186率先上天,“宇宙”188于10月30日被直接發射到距“宇宙”186相差24千米的軌道上。此后,先通過地面站的導引指令,“宇宙”186利用主發動機進行交會機動,并用姿態控制推力器進行軌道調整,“宇宙”188也同時用姿態控制推力器保持與“宇宙”186的相對指向,這一過程歷時30分鐘。接著,2艘飛船啟動“針”模擬測量系統,用雷達和計算機系統測量彼此之間的相對距離、相對速度、相對角速度、相對方位角,并逐漸接近,當相對距離為350米、接近速度降到每秒2米時,進入最終逼近階段。在最終逼近階段,“宇宙”188利用姿態控制推力器保持與“宇宙”186同軸,“宇宙”186伸出可伸縮的對接探桿,插到“宇宙”188的接納錐中。伸縮桿的頭部與接納錐一接觸,開始對接合攏。在對接合攏階段,作為追蹤航天器的“宇宙”186縮回探桿,將2艘飛船拉緊,對接面上的鎖把2個對接面鎖定,對接環上的掛鉤使2艘飛船保持20萬千克的接觸壓力,完成對接,實現氣密耦合。然后2艘飛船完成電聯接,進行通信。至此,完成交會對接的全過程。它們對接了3.5小時后開始分離操作:先是脫開探桿與對接環的掛鉤,然后對接環上的彈簧把2艘飛船彈開。“宇宙”186、188先后于1967年10月31日、11月2日著陸。
至今,蘇聯/俄羅斯的“聯盟”系列載人飛船和“進步”系列貨運飛船已成功進行了上百次的自動對接,它表明,其自動對接技術是可靠和先進的。
首次手動對接
在載人手動對接技術方面,美國率先于1966年3月完成了世界上第1次載人手動交會對接,此后一直保持領先。不過,蘇聯/俄羅斯也比較重視這一技術,目的是在自動對接失敗時采用手動對接來完成任務。
1969年1月16日,“聯盟”4、5載人飛船成功進行了蘇聯載人航天器的首次空間交會對接。它們仍采用“針”模擬測量系統和無通道的“桿-錐”對接機構。
1969年1月14日,載1人的“聯盟”4飛船升空,載3人的“聯盟”5飛船于1月15發射,后者飛行5圈后接近聯盟4。1月16日,通過地面導引使這2艘飛船在軌道上交會。當它們相距幾十千米時,啟動“針”模擬測量系統的交會雷達來測量相對距離和速度,實現自動尋的,從而彼此接近并調整姿態。當“聯盟”4、5相距100米以內時進入最終逼近階段,作為目標航天器的“聯盟”5通過姿態敏感器和陀螺測量其姿態進行自動控制,作為追蹤航天器的“聯盟”4飛船上的航天員沙塔洛夫借助電視攝像機和光學瞄準器通過手動控制完成與“聯盟”5飛船的對接合攏。對接后,沙塔洛夫先用手動方式為“聯盟”4、5定向,使飛船太陽電池翼對太陽定向,然后2艘飛船上的航天員檢查對接系統的通信線路,接著,航天員通過太空行走互相轉移到對方的飛船。最后,“聯盟”4、5分離。1969年1月17日,“聯盟”4載3人著陸,1月18日“聯盟”-5載1名航天員著陸。

“聯盟”4、5在軌對接后,航天員通過出艙轉移到對方飛船內

“聯盟”系列飛船與空間站對接

“聯盟”TM17與“和平”號空間站交會
與空間站對接
1971 年4 月19 日,蘇聯發射了世界上第一座空間站——“禮炮”1。其上的對接機構改為可移開的“桿-錐”式對接機構,即通過傳動機構把堵塞在通道內的錐形體等裝置自動移放在通道旁側,實現了對接后的密封連接并形成航天員來往通道。該對接機構需要一定的相對速度才能完成對接鎖定,先后用于蘇聯/俄羅斯各類飛船與各類空間站的對接。不過,從1986年蘇聯/俄羅斯發射“聯盟”TM載人飛船和“進步”M貨運飛船與“和平”號空間站交會對接起,開始用較先進的“航向”數字測量系統取代了“針”模擬測量系統,其優點是系統簡單,從距離幾十千米的自主段起始點開始,到對接機構接觸的全程均由該系統完成相對位置和姿態的測量。因早期的進步號系列貨運飛船使用“針”模擬測量系統,所以“和平”號上同時安裝了“航向”和“針”測量系統。“航向”數字測量系統一直沿用至今。
1986 年2 月20 日,蘇聯發射了“和平”號空間站核心艙,共配置了6個對接口。在其后的空間站組裝建造過程中共對接了5個實驗艙,交會對接仍然在水平軸向進行,對接后通過機械臂將空間站艙段或飛船移動到側向對接口。飛船與“和平”號的交會對接仍然有人控和自控兩種方式,對于無人的“進步”號飛船,人控由“和平”號上的航天員或地面控制人員進行操作。
“聯盟”TM飛船在與“和平”號空間站對接時,“航向”系統在距空間站400千米處開始工作,空間站自動調整姿態使其大體朝著視線方向,飛船上的雷達從200千米開始導引飛船自動對準空間站;到80千米處時,“航向”系統的信息僅指示狀態;從距空間站37千米開始,這一系統引入精確制導、導航和控制計算機。
測量系統
蘇聯/俄羅斯先后發展了2代用于空間交會的測量系統。早期使用“針”模擬測量系統。它采用視線運動平行控制,主要用交會雷達測量相對距離和速度;測量系統簡單,易于實現。
1986年,蘇聯/俄羅斯用“航向”數字測量系統取代了“針”模擬測量系統,使作用距離增大,并允許飛船從任意方向與空間站對接。“航向”系統的主要改進是增加了數字計算機,航天員也可借助顯示器和鍵盤進行手動控制。
俄羅斯曾研制了有人介入的“遠程對接控制器”自動交會測量系統,但在1997年4月“進步”M33貨運飛船與“和平”號空間站進行交會對接時,“遠程對接控制器”出現了故障;之后的“進步”M34再次使用該系統時又發生了碰撞故障。所以,從“進步”M35開始,又改用原來的“航向”系統,而沒有再用“遠程對接控制器”系統。
“航向”屬于S頻段微波交會雷達測量系統,其距離測量采用載波調幅相位法,徑向速度測量采用連續波多普勒測速。“聯盟”TM飛船上裝有微波交會雷達系統,包括自動導引頭、測距儀和徑向速度測量裝置;空間站上裝有信標、應答機和通信設備以及相應的搜索、捕獲定向敏感器。
“航向”系統共有9部天線組成搜索捕獲和跟蹤測量系統,追蹤航天器上有5部,目標航天器上有4部。其中6部天線用于搜索捕獲和初定向,余下的3部中有1部用于停靠階段定向,另2部用于相互跟蹤、相對運動測量和停靠階段定向。用于搜索的天線為螺盤天線,用于跟蹤的為拋物面天線。
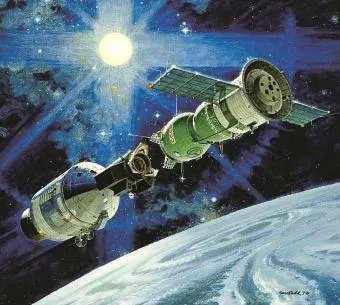
1975年,蘇聯“聯盟”19飛船與美國“阿波羅”18交會對接

俄羅斯艙段對接到國際空間站上后對接機構已經沒有用處,又由于“桿-錐”式對接機構占用艙門附近通道,所以需要拆除它們

“禮炮”1與“聯盟”11對接示意圖
對接機構
蘇聯/俄羅斯航天器的對接機構以實用、易操作、高可靠為根本,經歷了由簡單到復雜的幾個階段。
最初采用沒有密封通道的“桿-錐”式對接機構航天員必須出艙才能進入另1艘飛船。從1971年“聯盟”11飛船與“禮炮”1空間站對接起,蘇聯/俄羅斯采用了可移開的桿錐式對接機構,增加了緩沖器系統。最具創新的改進是,它把對接框上的所有對接元件(除密封圈外)都做成同樣的形式,這也是后來的異體同構周邊式對接機構的雛形。它通過傳動機構把堵塞在通道內的錐形體等裝置自動移放在通道旁側,實現了對接后的密封連接并形成航天員來往的密封通道。
1975年,蘇聯“聯盟”19飛船與美國“阿波羅”18飛船進行了空間交會對接。它們采用新研制的“異體同構周邊”式對接機構,使2個擬在太空對接的航天器既可作主動方,也能作被動方。另外的改進是,對接機構為周邊的,即所有定向和動力部件都置于艙口的四周,以保證中央自然形成密封的來往通道。
蘇聯/俄羅斯“聯盟”系列載人飛船、“進步”系列貨運飛船及其空間站艙段大多采用“桿-錐”式對接機構。其優點是結構簡單,質量較輕;缺點是對接機構全部安裝在航天器殼體內部,對接后占據較大內部空間,其承載能力也比較低。
對接故障
至今,蘇聯/俄羅斯已發射了上百艘宇宙飛船,發生了10多次故障。
l969年10月12日、l3日,蘇聯先后發射了“聯盟”7、8飛船。10月15日,“聯盟”8逼近“聯盟”7,兩者相距500米,由于飛船的姿態控制系統出現故障,使它們進行了多次機動飛行也沒能實現對接。
1971年4月23日,“聯盟”10飛船升空,4月25日實現與“禮炮”1空間站對接,但由于打不開空間站的艙門,使飛船上的航天員無法進入空間站,結果“聯盟”10只能載著航天員與空間站分離返回地面。
1974年8月26日,“聯盟”15飛船升空,當它與“禮炮”3空間站相距30~50米時,由于飛船制動過快,所以無法實現自動對接,又因“聯盟”15采用蓄電池供電,飛行時間不能超過2.5天,所以手動對接也沒成功,結果飛船只能返回。
1976年10月14日,“聯盟”23飛船升空,當它與“禮炮”5空間站相距不到100米時,自動交會對接系統發生故障,又由于參加此次飛行的2名航天員都沒有進行過手動對接訓練,結果對接失敗。
1977年10月9日,“聯盟”25飛船升空,當它與“禮炮”6空間站對接時,由于飛船對接機構出現故障,導致對接失敗。
1979年4月10日,“聯盟”33飛船升空,它與“禮炮”6空間站交會后,由于飛船主發動機出現故障,結果無法對接。
1983年4月20日,“聯盟”T8飛船升空,準備與“禮炮”7空間站對接。由于在發射過程中整流罩與飛船分離時將飛船的交會對接雷達天線扯掉,結果無法交會對接。
1987年3月31日,“量子”1艙升空,準備與“和平”號空間站核心艙對接。在距“和平”號200米時,它不能追蹤到“和平”號的雷達信號,為此,進行了第2次嘗試。當“量子”1艙與核心艙相距20厘米時,2個艙無法再接近。最后,空間站上的航天員出艙發現對接面粘連了一塊異物,航天員費了7天時間排除了異物后才成功實現了對接。
1991年3月23日,“進步”M7飛船與“和平”號空間站進行自動對接時險些發生碰撞,原因是此前空間站上的航天員出艙活動時碰撞并弄偏了空間站上一個交會對接系統的天線。6月25日,“和平”號上的兩名航天員出艙活動4小時58分,更換了出故障的雷達天線。
1994年8月25日,“進步”M24飛船升空。由于判定對接角不正確和自動交會對接系統雷達出現故障,飛船2次與“和平”號空間站對接失敗。9月3日,航天員通過手動控制方式順利實現對接,并通過出艙活動檢查對接口。
1994年10月4日,“聯盟”TM20飛船升空,當它與“和平”號空間站準備對接時,飛船姿態控制系統故障,導致飛船突然偏航,航天員放棄自動對接,通過手動控制完成了交會對接。
1997年6月24日,“進步”M34飛船脫離“和平”號空間站對接口飛離一段距離,25日,該飛船飛回來再次逼近空間站時,由于制動控制部件失靈,飛船沒有及時對航天員的指令作出響應,因此直接撞到“和平”號的“晶體”艙上,使“晶體”艙受損。地面控制中心立刻控制住了“進步”M34。
2001年11月28日,由于對接口上存在異物,飛抵國際空間站的“進步”M17飛船未能與國際空間站“星辰”號服務艙對接。12月3日,國際空間站上的航天員出艙清除了異物。隨后,“進步”M17與“星辰”號完成對接。
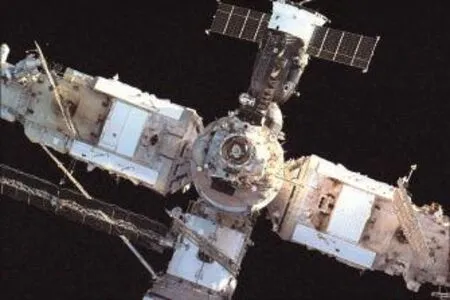
“和平”號空間站上安裝的“異體同構周邊”式對接機構用于與美國航天飛機對接
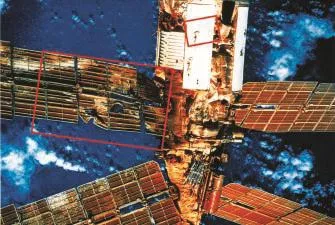
“進步”M34貨運飛船因交會對接系統故障,撞壞“和平”號“光譜”艙和太陽能電池翼(圖中紅色方框所圈出的部分)

裝有“航向”自動交會測量系統的“進步”系列貨運飛船
近期故障
2010年6月30日,“進步”M06M飛船升空,當它在7月2日距國際空間站 2千米時,由于“航向”自動交會測量系統出現故障,使飛船與空間站之間的通信信號突然丟失,并延續長達25分鐘,而且手動對接也沒有成功,結果對接失敗。最終,“進步”M06M不得不繼續其軌道飛行并飛過了空間站。此后,專家確定了失敗的原因:貨運飛船上“航向”自動交會測量系統的視頻轉播器被激活,其信號對自身產生了干擾,導致飛船與國際空間站間正常對接指令鏈中斷,從而觸發了要求飛船中止對接的信號。7月4日,“進步”M06M再次與國際空間站交會,并與“星辰”號服務艙順利對接。
2010年9月24日,“聯盟”TMA18出現機械上的故障,導致了軟件故障和錯誤信號,結果未能按計劃離開國際空間站返航。原因是由于國際空間站迷你研究艙2上對接機構中的“艙門蓋鎖定”傳感器出現問題,沒有發出預定信號,導致連接飛船接口處的掛鉤無法打開。在進行了“廣泛故障診斷”后,國際空間站上的飛行工程師尤爾赦金在對接機構中安裝了一條跨接電纜,模擬“艙門蓋鎖定”傳感器,從而繞過了失效的艙門傳感器。之后,莫斯科任務控制中心成功發送指令打開了艙體連接掛鉤。9月25日“聯盟”TMA18成功脫離國際空間站,并安全返回地面。
2010年10月30日,“進步”M08M與國際空間站“碼頭”號對接艙自動對接失敗,飛行工程師卡列里以手動方式實現對接。對接失敗的原因是由于利用高頻鏈接標準與“碼頭”號對接艙聯系的“航向”交會控制天線出現問題,導致航向射頻對接支持系統出現故障。
蘇聯/俄羅斯共發射3代空間站,其間共進行上百次的交會對接,有10多次失敗,但主要發生在初期階段。針對故障原因,蘇聯/俄羅斯通過改進交會對接技術、建立與完善地面試驗手段、增加地面仿真試驗等手段,使交會對接技術的可靠性和安全性得到不斷提高。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21