耳神經-顱底影像導向技術[耳顯微外科2007版(二十)]
2011-11-17 05:21:10王正敏
中國眼耳鼻喉科雜志 2011年1期
王正敏
·教育園地·
耳神經-顱底影像導向技術[耳顯微外科2007版(二十)]
王正敏
傳統手術是以解剖結構作為手術漸進、深入人體內部的標志,來達到預定目標的,這就不可避免地要擴大術野來確識標志。此外,對缺乏標志和目標周圍及其背后重要的又看不到的結構,傳統手術是憑借手術者的學識和經驗來完成的。術前影像學評估是指導手術的重要信息,手術者通過全部影像資料結合對解剖學的認識,在腦中建立與手術目標相關的三維概念。這個過程對手術入路簡單,正常解剖標志變化不大的手術是適宜的。但是,對存在病變而使正常解剖標志變異時,傳統手術方法的不足就顯而易見了。至于微創手術,其術野更小,手術目標的周邊組織更因“一孔之見”而要求手術者有更精密的解剖知識,以求正確定位,在安全邊界內清除病變。
影像學導向系統(又稱導航系統)技術應運而生。腦立體定位手術和虛擬現實對現代外科醫師已是相當熟悉的名詞。在耳鼻喉科領域,影像導向系統已用于前顱底手術(如功能性內鏡鼻竇外科)和側顱底手術。
1 影像導向外科簡史
在CT發明以前,曾有參考顱內外相關標志,利用氣腦造影術來定位顱內外深層結構,并嘗試作腦的部分切除來治療帕金森病。雖然這個方法費時費力,并不實用,但引起了外科醫師的廣泛注意和興趣。CT和磁共振成像(magnetic resonance image, MRI)技術發明以后,才有了現代實用腦立體定位手術。這一技術主要特點是利用一種頭部支架完成影像空間對手術空間的登記。手術前,通過CT(或MRI)結合連接頭架上的定位系統獲得數字影像數據。這一頭部支架附帶笛卡爾坐標系統,在影像檢查前,頭架戴在患者頭上,為定位裝置提供數個接觸點。數字影像檢查把各個接觸點的坐標值編為影像坐標值的數據。影像坐標值與坐標系統相關,從而確定相對頭架各點的位置,達到導向空間被界定的目的。雖然這種頭架系統顯得有些笨重,使用不便且費事,但能精確對準顱內的目標,作腦深部定向活組織取出用。這種頭架系統經改進,有兩種手術計劃, (1)簡單型:利用頭架系統在頭部數字影像檢查選數個點,所選各點會轉換成定位坐標,可作靶向手術(如取活組織、電凝病變等)用;(2)復雜型:結合彈道模擬,為手術者定方向,以安全引導手術入路,最小程度損害路周正常組織。
頭架系統必須十分穩固地用螺栓與顱骨接觸,會給患者帶來不適。所以,使用頭架系統作術前影像登記需要全身麻醉。此外,頭架系統戴在患者頭上有礙麻醉和手術,尤其不適用于顱后窩和其他顱底手術,所以頭架式腦定向手術不太受臨床歡迎而未廣泛應用。
2 影像導向外科技術
2.1 無支架腦立體定位外科技術 無支架腦立體定位外科技術具有頭部支架腦立體定位外科系統技術的精確性,而不需要前面提到過的螺栓式支架。無支架腦立體定位外科系統有傳感器和計算機兩個部分。傳感器遞送位置信息,計算機將傳感器位置信息譯成看得見的可確證實時解剖信息的輔助手段。從影像坐標值到腦立體定位坐標是由這兩個坐標系統共有的3個或3個以上非線性點(基準點)規定的。基準點含有解剖標志或參考標簽。參考標簽穩固地連接在頭部不變動的部位上。
已有數種數字轉換器或傳感器技術用在手術空間和相應影像空間的轉換上。這類數字轉換器分力學連鎖系統和非力學連鎖系統兩類。
2.1.1 力學連鎖系統 力學連鎖系統以在手術臺上裝有機械臂而得名。機械臂在其關節裝有靈敏的電位計(或角偵計)。從每點旋轉光學編碼器輸出取樣,由計算機得出機械臂頂端的位置,給出機械臂坐標(以機械臂基座為基準)。因為機械臂連接在患者頭部,而患者頭部又作了影像學登記,這樣就可將兩個坐標系統各共用點計算成地形圖的變換。手術時,機械臂尖端(或指示器)的實時定位可與術前影像檢查相符合。雖然力學連鎖系統較之頭架式腦立體定位外科系統來說,可免去影像登記螺栓固定的痛苦,但仍顯得笨重,有阻礙手術操作的缺點。現今已很少在耳科和神經外科應用。
2.1.2 非力學連鎖系統 非力學連鎖系統是利用附加在手術機械上的發射器發生信號的偵知系統工作原理設計的。有主動偵知和被動偵知兩種。實際上,這與現代的衛星三角定位相似,非力學連鎖系統可作三維空間定位和追蹤手術器械之用。按發射器種類分,有超聲、電磁和光電三種。
超聲數字分析儀利用發射器所發生聲音的時程,用3只或更多的接收器進行測量定位。超聲數字分析系統的主要優點是發射器和受感器之間無光學障礙。但聲速會受溫度和濕度影響導致定位偏差,而且在手術室里還會受回聲和射頻發射的干擾,所以凡屬聲參考系統的設計不受歡迎。
電磁參考系統也有超聲數字分析儀不受障礙影響的優點。這一系統用CT掃描和術中戴的同一只頭帶作為參考,登記迅速方便。其主要缺點是易受手術室中其他電磁系統和鐵磁器械的干擾。另外,影像登記的頭帶位置和手術登記的頭帶位置若有輕微不一致,就會降低定位精確性。這種系統應用結果表明,精確性誤差不大,比較適用于前顱底內鏡鼻竇手術,但不適用于側顱底手術。
光電數字分析器系統要求發射器和高懸支架上的照相機之間無光線行進障礙。照相機需3只,內含1×4096元件線性充電耦合裝置,可確認附加在手術器械上的紅外線二極管(LEDs)的三維位置。照相機懸在高于手術野1.5~2.0 m的弧形橫架上,以便于追蹤手術器械上的LEDs。有多種LEDs設計,通過計算機軟件可適配各種手術器械。光電參考系統有主動型和被動型兩種。主動型手術器械主動傳送紅外信號,而被動型手術器械被動反射紅外信號。主動型需要在手術器械上附加線路,而被動型則不需要。
新型光電數字分析系統配有激光輪廓化解剖登記新方法。這一新方法使用了LEDs接觸激光測距器,并在顱骨解剖差異處上移動激光測距器,就可產生成百個組成輪廓線的點。這一輪廓就可與影像資料中提取到的相應頭皮輪廓相配。這一登記方法會大大減少設置時間和登記差錯。
光電參考系統無疑是3種發射系統中最理想的一種,尤其適合側顱底定向。高懸式照相機排列對耳外科和耳神經外科多有不便,因為它們都離不開手術顯微鏡。手術顯微鏡體積大小及其布局位置會阻礙紅外通信路線,這一點就不及電磁系統。作者設計的側顱底天線式二極管主動紅外線發射系統在相當大的程度上克服了這一障礙(圖①~⑤)。

圖1 紅外發射器釘座刺入頭皮淺表

圖2 紅外發射器釘座刺入頭皮深部

圖3 用螺旋器將釘座固定在顱骨上

圖4 在釘座上安裝高桿紅外發射“天線”(紅外二極管)
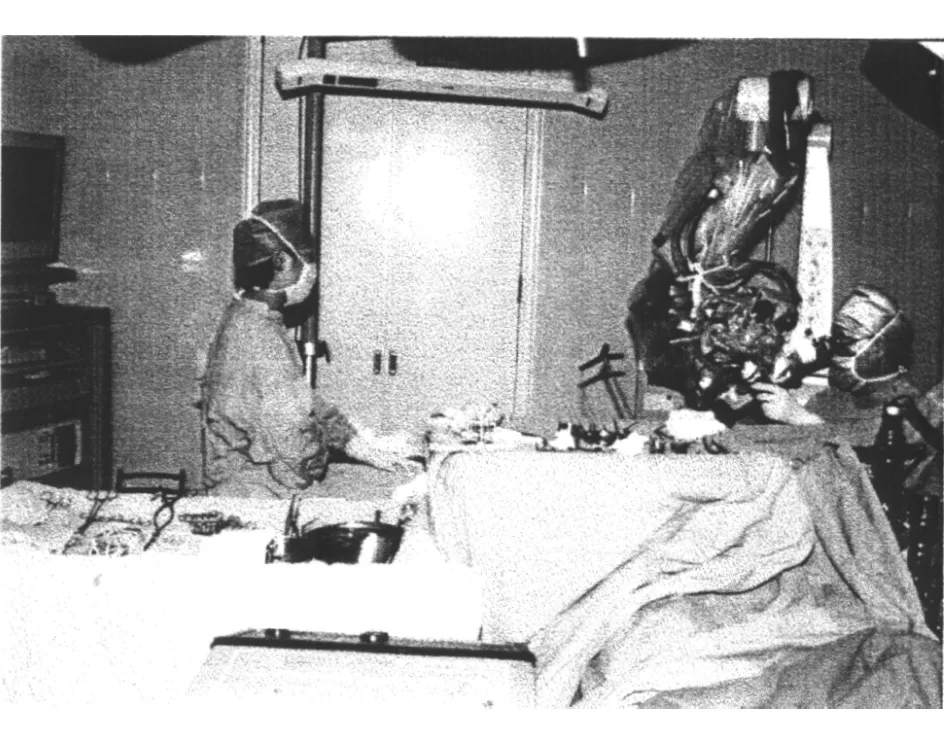
圖5 紅外照相固定架和紅外發射“天線”無“盲區”發射,手術顯微鏡在“天線”一旁
2.2 容積式腦立體定位外科技術 用計算機重建增強的容積常規程序,可在腦立體定位外科系統中展示和操作,并可在手術顯微鏡術野焦平面將影像資料展示,還可沿著視線以推進深度展示顱內腫瘤橫切面輪廓線,從而指示手術者定位在焦平面水平所示的腫瘤邊界,通過手術和電腦控制的激光將腫瘤安全切除(圖⑥~⑧)。這種系統提高了手術野和影像資料的相關性,不過,因手術造成軟組織移位,此輪廓線會不準確,這是因為影像資料是手術前設定的。
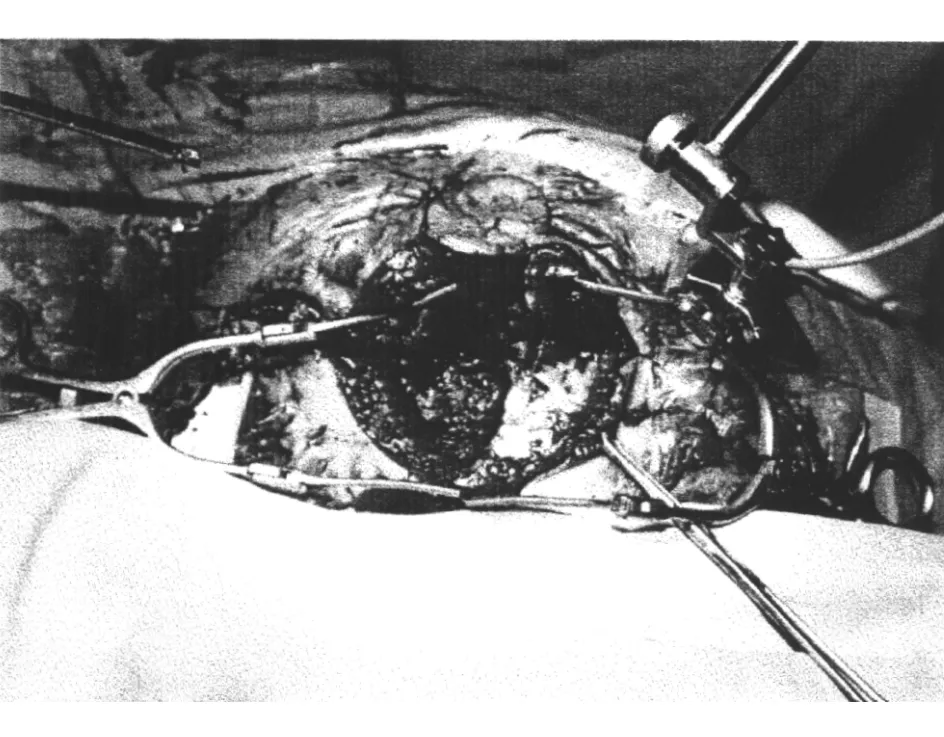
圖6 紅外發射釘座和側顱底手術術野的位置關系

圖7 紅外線發射系統磁共振成像 A.B.分別示不同層面的三維圖像。圖中十字交叉點為紅外發射指示器尖端的位置
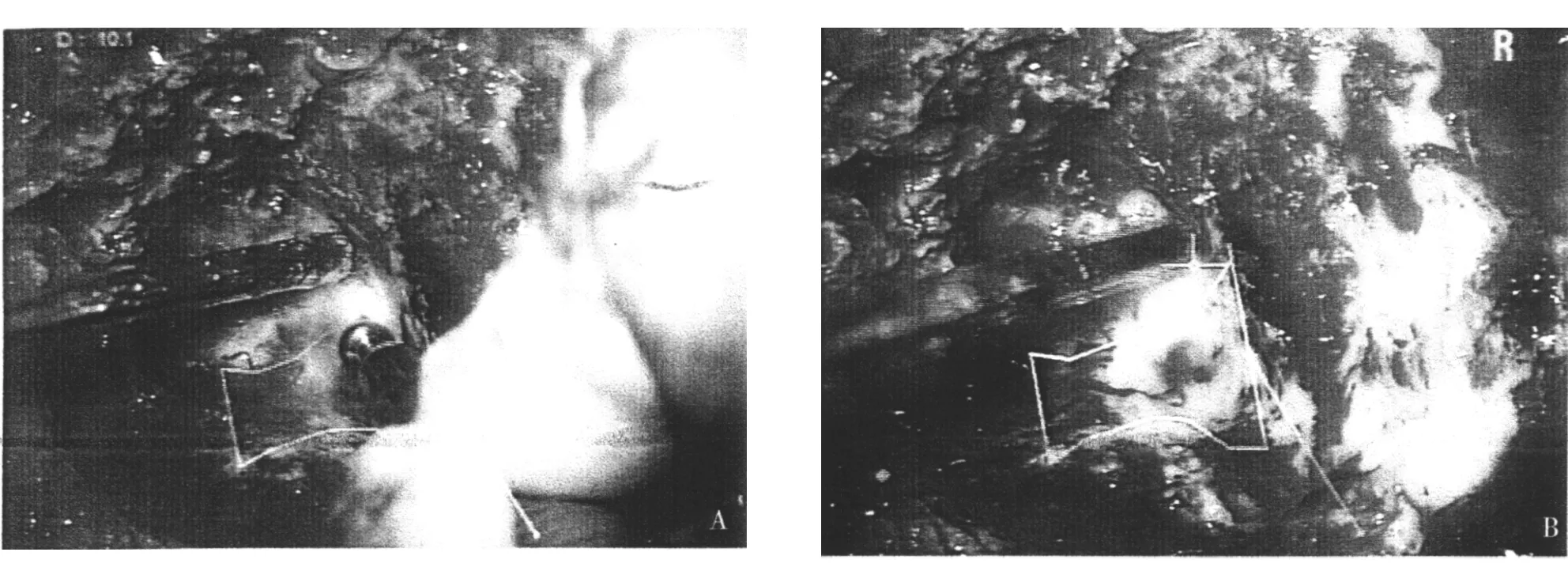
圖8 巖骨膽脂瘤虛擬輪廓線條 白色線條提示迷路后膽脂瘤范圍,虛擬輪廓線為術者作手術導航。
2.3 實時術中成像技術 所有上述的無支架腦立體定向系統,其計算機規則系統和圖示影像展示都是手術前的成像資料。在手術中,軟組織可因手術操作、水腫和血腫而移位或變形,原患者解剖三維模式影像登記就無效,失去精確性。這種情況特別容易在切除顱內或顱底下軟組織術野中的腫瘤時發生。實時術中成像可解決這一問題,提供即時的真實解剖狀況、手術器械的位置而無需無支架腦立體定向手術系統所必需的基準登記。
X線、超聲圖和CT已被用來顯現經皮穿刺活檢和血管介入,但容積影像的空間分辨率不足。MRI因有軟組織對比佳、容積分辨率良好、多層面和函數演算等優點,又無離子放射,故適合用作實時影像導引療法。中等術野開放布局和垂直磁體足可滿足手術操作。結合無支架腦立體定向系統,MRI系統就可追蹤術中解剖改變,還可用監視器展示非鐵磁體器械。術中MRI系統最適用于位置深匿腫瘤的手術和能量可控熱切除療法。實時術中成像手術又稱為介入性MRI系統,目前還處于研究階段。對于耳外科和耳神經外科,介入性MRI系統顯示骨結構不如CT,其應用前景尚待探索。
3 影像導向系統在耳外科和耳神經外科的應用
影像導向系統在耳外科和耳神經外科的應用還處于探索階段。實時術中成像技術會將耳科“漏斗式”手術概念變換為“隧道式”導航手術概念。“漏斗式”手術概念是指傳統手術方式,進入耳深部時外寬內窄,依靠手術入路沿途的解剖標志到達深部的手術目標。“隧道式”手術概念之意為從一鑰匙孔大小的手術入路從成像上虛擬地看到重要的解剖標志而達到手術目標。實時術中成像對耳畸形和硬化乳突認識標志、顱中窩至內聽道及巖尖手術的狹小入路定向會很有用,節約手術時間,提高安全性。在“骨盒子”內手術,可使用無支架立體定位系統。所謂“骨盒子”是指像乳突、巖尖等骨結構解剖部位。移動其內部結構仍可保持術前影像登記信息。在腦橋小腦三角區或顳下窩區為腦、肌肉和血管等軟組織,所作手術會發生這類結構移動,導航手術系統就應選實時手術成像為宜。
最后必須強調,影像導航系統技術的臨床應用要求多學科的合作,尤其是耳外科、耳神經外科臨床和影像學檢查的互相支持和配合。不論影像導航系統定向有多精密,手術者的手術解剖學知識仍是代替不了的。手術者要結合手術中能發現的標志加以對比,方能做出恰當的判斷。
(未完待續)
2010-11-29)
(本文編輯 楊美琴)
復旦大學附屬眼耳鼻喉科醫院耳鼻喉科 上海 200031
王正敏(Email:entuem@yahoo.com.cn)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
河北畫報(2020年10期)2020-11-26 07:20:50
模具制造(2019年3期)2019-06-06 02:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
航天器工程(2014年5期)2014-03-11 16:35:55