基于DSP的抽油機變頻控制系統
2011-11-16 06:39:26邊向南張慶軍大慶油田裝備制造集團研究院
石油石化節能 2011年5期
邊向南 張慶軍(大慶油田裝備制造集團研究院)
基于DSP的抽油機變頻控制系統
邊向南 張慶軍(大慶油田裝備制造集團研究院)
針對目前油田普遍使用的游梁式抽油機的驅動電動機運行過程中功率因數和效率較低的問題,基于帶補償的恒轉矩控制技術,研究開發了一種基于TMS320F2812高性能DSP的抽油機專用變頻控制裝置。采用恒壓頻比控制策略,利用空間矢量PWM算法對電動機輸入電壓和頻率進行最優控制,提高了電動機的功率因數,運行效率達到最佳。樣機試驗結果表明,30 kW抽油機變頻器在提高功率因數和效率方面效果顯著,達到了節能的目的。
抽油機 DSP 變頻 空間矢量
D O I:10.3969/j.i ssn.2095-1493.2011.05.009
常規游梁式抽油機都是帶載啟動,需要較大的啟動力矩,為使抽油機順利啟動,一般按最大轉矩選配電動機,而正常運行時只需啟動力矩的三分之一,再加上所配交流電動機的功率在運行過程中不可調,便形成了“大馬拉小車”的現象。采用變頻調速不僅能夠解決此問題,而且可以達到節能的效果。
1 硬件設計
1.1 主電路設計
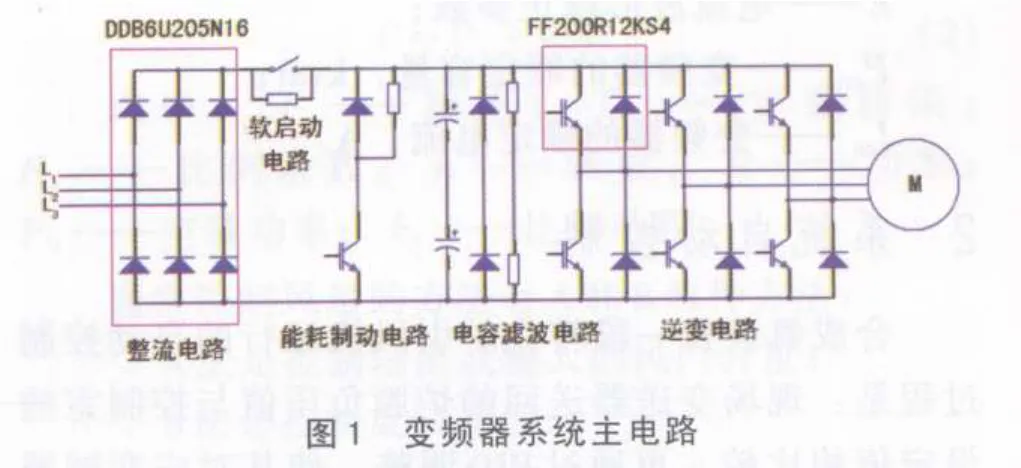
主電路由整流電路、軟啟動電路、濾波電路、能耗制動電路和逆變電路構成[1],如圖1所示。基于油田380 V交流電網,考慮系統長期穩定運行以及系統的成本,采用二極管三相橋整流,整流電路當輸入為三相380 V線電壓時,L1、L2、L3分別接三相電源線,與通用變頻器功率電路相同。軟啟動電路為保護濾波電容設置。當變頻器剛接通三相電源線時,由于濾波電容電壓為零,充電電流很大,很容易損壞濾波電容。在充電回路增加限流電阻,減小充電電流。當電壓達到一定值時,吸合與限流電阻并聯的繼電器,使整流電路正常工作。電容濾波電路增加了放電電阻,當變頻器停止工作時,直流母線電壓通過放電電阻放電,在規定時間內降到安全電壓以下,保證了操作安全。逆變電路為三相橋式逆變電路。整流電路采用了EUPEC公司的DDB6U205N16模塊,逆變電路采用6組FF200R12KS4模塊。
1.2 驅動電路設計
驅動電路采用Agilent的門極驅動光耦HCPL-316J和HCPL-3120相結合的方法。逆變電路的上橋臂采用HCPL-3120驅動,下橋臂采用HCPL-316J驅動。HCPL-316J和HCPL-3120的傳輸延時小于500 ns;能提供2 A的驅動電流,最大可驅動Ic=150 A的IGBT;具有內部欠壓保護功能;下橋臂通過HCPL-316J配合外圍電路C6、R5和D1構成測量IGBT的Vce短路保護電路。
1.3 控制電路與接口電路設計
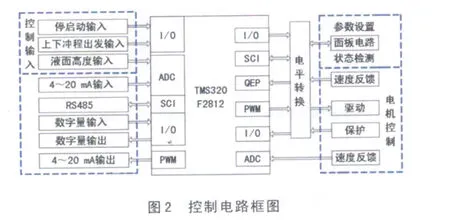
控制電路主要完成電動機控制、接口控制和面板通訊三部分功能。圖2為控制電路框圖,考慮到將來油田現場系統功能升級的需要,控制器采用TMS320F2812;電平轉換芯片采用了SN74ALVC164245和SN74LVC8T245;電動機控制部分由與控制器相配合的驅動保護電路、采樣調理電路和速度反饋電路構成;控制輸入部分由停啟動輸入、上下沖程觸發輸入和液面高度輸入構成;面板通訊是控制器通過SCI與面板電路通訊。在油田現場工程應用中,變頻器一般與PLC、監測設備、現場總線和控制器等構成傳動控制系統,因此變頻器的接口設計在變頻器的應用中起到很重要的作用。但到目前為止,在變頻器的接口設計方面業界并沒有統一的標準,參考了通用型變頻器Siemens的MicroMaster440系列設計,預留了功能相對齊全的接口設計電路。主要包括:4~20 mA模擬量輸入輸出電路、數字量輸入電路、數字量輸出電路和RS485通訊接口電路。
1.4 面板電路設計
面板電路主要完成人機交互功能,包括參數設定、參數監控、錯誤報警和報警處理及與控制器通訊等功能。硬件電路由LED、LED數碼管顯示電路、鍵盤輸入電路和面板電位器組成。面板電路框圖如圖3所示,控制芯片采用ATmega16單片機,通過SCI與控制器通信,通過SPI控制LED數碼管顯示,通過I/O端口對鍵盤采樣,對LED顯示控制,通過片上ADC對面板電位器信號采樣。
2 軟件設計
2.1 控制板軟件設計
控制板軟件設計主要就是對控制電路的TMS320F2812進行編程[2-3],軟件采用模塊化的設計結構,主要完成電動機控制、面板通訊和接口控制三部分功能。電動機控制和面板通訊部分對于控制的實時性要求高,因此采用定時器中斷服務程序的方式完成;接口控制部分對實時性要求低,并且考慮到要減小這兩部分對電動機控制部分的影響,因此采用在主程序中輪循的方式完成。圖4是主程序流程圖。
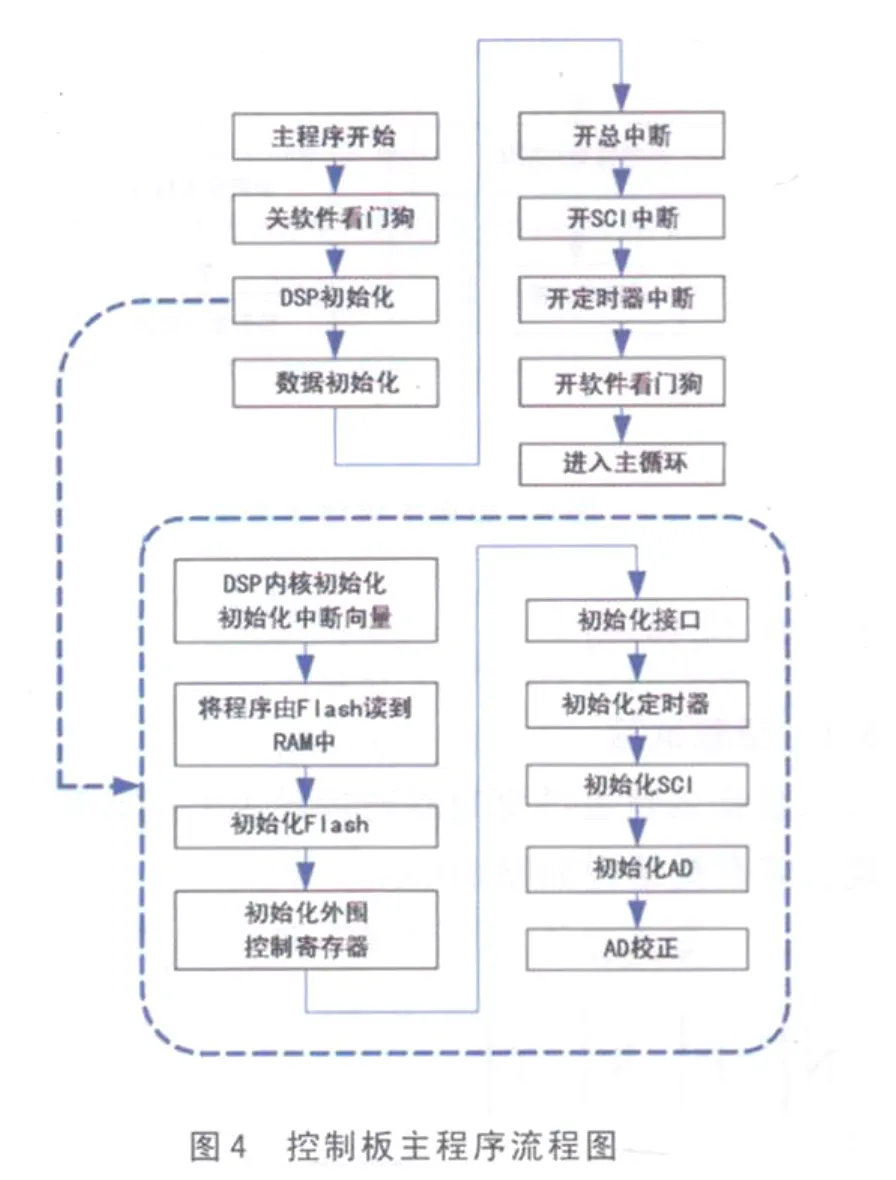
因為開關角度計算對控制的實時性要求很高,要求DSP有很快的相應時間,而程序在Flash中存儲,讀寫等待時間為5個時鐘周期,降低了DSP的運算速度,因此將定時器中斷和SCI中斷中執行的關鍵程序拷貝到RAM中,這樣,DSP就會以更快的速度執行指令。為了達到對電流電壓的準確采樣,在程序里增加了對AD的校正。通過對已知參考電壓1.5 V和2.5 V多次采樣求平均值,然后根據采樣結果反推增益系數和零點偏置。在主循環中,定時器中斷和SCI中斷可以在任意時刻得到響應,接口指令通過輪詢方式得到響應。
2.2 面板軟件設計
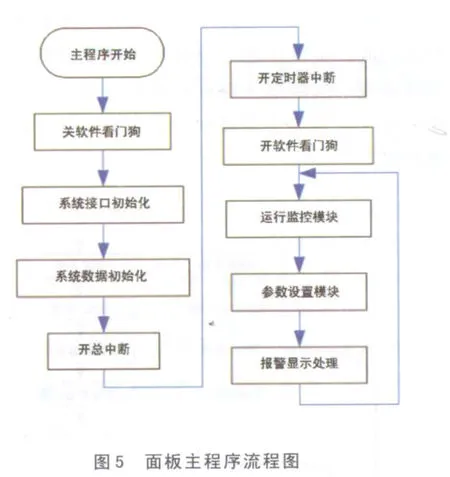
通過面板控制器對LED數碼管和LED指示燈的控制、對鍵盤和面板電位器的采樣實現人機交互。人機交互主要實現三部分功能:運行監控、參數設置、報警顯示與處理。在程序設計中這三部分各自為一個模塊在主程序中循環工作。面板主程序流程圖如圖5所示。
3 樣機試驗
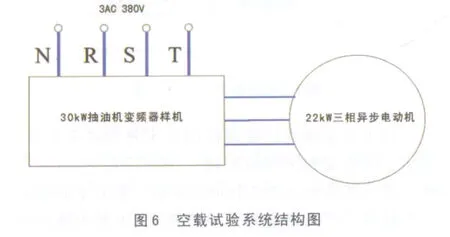
3.1 空載試驗
空載試驗通過變頻器連接異步電動機的方式實現,其系統結構如圖6所示。
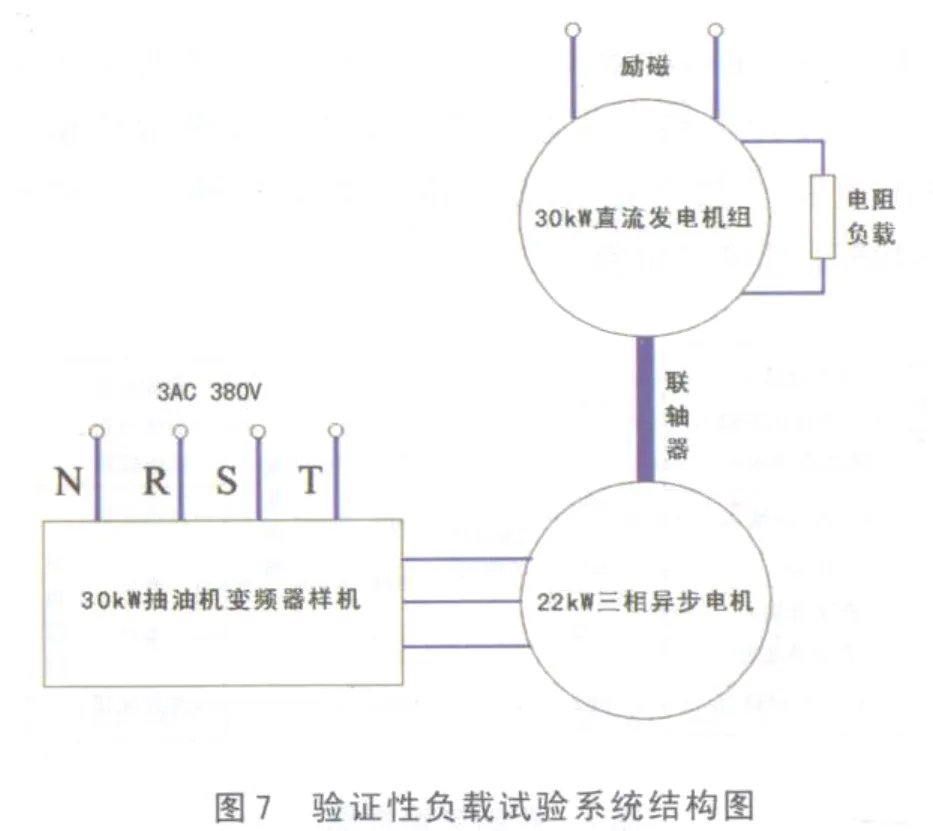
3.2 驗證性負載試驗
驗證性負載試驗的系統結構如圖7所示。利用研制的抽油機專用變頻器樣機,額定功率30 kW,在輸入電壓為三相380 V情況下,驅動額定功率為22 kW、額定電壓為380 V的三相異步電動機,異步電動機通過柔性連軸器驅動額定功率為30 kW的直流發電機組,發電機所產生的電能由電阻器消耗掉。
試驗中為了驗證基于SVPWM的恒壓頻比控制軟件設計的正確性[3-4],以及人機交互軟件設計的可操作性,設定上沖程運行頻率為50 Hz,下沖程運行頻率為50 Hz。當電動機運行在50 Hz時,通過直流勵磁電壓和變阻器調節負載功率為18 kW,構成60%負載的驗證性負載試驗。此時,通過功率分析儀PZ4000可以觀察到變頻器對電動機的輸入視在功率為19.969 kVA,有功功率為19.07 kW,無功功率為0.899var,功率因數為0.955,線電壓有效值為378 V,線電流有效值為14.562 A。
4 結論
基于高性能DSP的變頻控制系統,利用DSP運算速度快、處理能力強、可靠性高等優點,實時控制抽油機電動機的運行狀態。該變頻控制系統有明顯的節能效果。通過不斷的完善,今后該裝置將在油田中得到廣泛的應用。
[1]王兆安,黃俊.電力電子技術[M].4版.北京:機械工業出版社,2009:43-90.
[2]馬幼捷,齊鳴.基于DSP的SVPWM變頻調速系統的研究[J].機械與液壓,2009,10(2):27-31.
[3]陳伯時.電力拖動自動控制系統[M].2版.北京:機械工業出版社,2005:179-180.
[4]謝青紅,張筱荔.TMS320F2812 DSP原理及其在運動控制系統中的應用[M].北京:電子工業出版社,2009:112-116.
邊向南,畢業于北京航空航天大學,博士,從事裝備制造質量與標準化工作,工程師,E-mail:zhangqj001@cnpc.cn,地址:大慶市薩爾圖區中寶路13號大慶油田裝備制造集團研究院質量與標準化室,163312。
2011-05-13)
猜你喜歡
石油石化節能(2022年12期)2022-12-30 04:45:02
設備管理與維修(2022年21期)2022-12-28 07:35:42
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
計算機測量與控制(2017年6期)2017-07-01 16:24:20
電子制作(2017年7期)2017-06-05 09:36:13
中國煤層氣(2014年6期)2014-08-07 03:07:05
自動化博覽(2014年12期)2014-02-28 22:34:39
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年16期)2014-02-27 14:13:19
