無人機航攝系統大比例尺測圖試驗分析
2011-11-15 03:22:26王志豪
測繪通報 2011年7期
關鍵詞:測繪
王志豪,劉 萍
(1.深圳市勘察測繪院有限公司,廣東 深圳 518028;2.中國科學院深圳先進技術研究院,廣東 深圳 518055)
無人機航攝系統大比例尺測圖試驗分析
王志豪1,劉 萍2
(1.深圳市勘察測繪院有限公司,廣東 深圳 518028;2.中國科學院深圳先進技術研究院,廣東 深圳 518055)
以大比例尺(1∶1 000、1∶500)地形圖測圖為目的,采用中型固定翼無人機平臺,搭載非量測型民用數碼相機,于和田某區域設立飛行試驗場進行航攝試驗。在試驗場布設大量精確定位的人工地標,對非量測型傳感器進行檢校標定,對無人機航攝系統獲取的航攝影像平面精度及測高精度進行評估,并對系統的改進提出建議。
固定翼無人機;大比例尺測圖;相機檢校;測高精度
一、引 言
無人飛行器航空攝影系統由于使用成本低、影像分辨率高、機動快速響應等優點,可作為低空遙感數據快速獲取的有效途徑。而傳統無人機并非為航空遙感而設計,因此沒有考慮到遙感飛行的特殊性。此外,無人飛行器所搭載的非量測型相機存在較大的光學畸變,不能直接用于測繪生產[1]。因此,低空無人機航攝系統面臨著工作效能與測量精度兩方面的問題。
本研究自行設計并實現了一套中型固定翼無人機攝影測量系統,為了驗證該自主低空航攝系統的測量精度,設計試驗于和田某區域進行實際航飛作業,布設一個具有大量地面控制點的飛行試驗場,采用無人機搭載非量測型數碼相機進行攝影作業,然后對航飛數據通過區域網空中三角測量的自檢法來計算全部系統誤差對像點位置坐標的綜合改正值,從而確定內方位元素和物鏡的光學畸變值,實現相機的高精度標定,并將標定結果用于測繪產品生產,以此來對無人機航空攝影測量系統在小區域大比例尺地形圖立體測繪中所能達到的精度水平進行評估和驗證。
二、航攝系統組成
本檢校試驗采用的航攝系統組成部分有:固定翼無人機飛行平臺、飛行控制系統和非量測型面陣CCD數碼相機,以及地面站、遠程無線通信裝置、地面數據處理系統等輔助設施。
1.無人機飛行平臺
由于固定翼無人機具有低成本,可實現低速平穩飛行等優點,本研究采用固定翼無人機平臺。平臺主要采用重量輕、強度大的玻璃鋼和碳纖維復合材料加工而成,機長為2.15 m,翼展為3.1 m,最大起飛重量為20 kg,起飛速度為70 km/h,任務倉尺寸為600 mm×280 mm×200 mm,任務載荷為6 kg,飛行速度為100~110 km/h,飛行高度≤4 km,續航時間為3 h,控制半徑為≤20 km。
2.飛行控制系統
飛行控制系統用于飛行控制與任務設備管理,由自駕儀、姿態陀螺、GPS定位裝置、無線電遙控系統等組成,可實現飛機姿態、航高、速度、航向的控制及各個參數的傳輸以便于地面人員實時掌握飛機和遙感設備的飛行情況。機上采用的GPS接收板為普通單頻無差分GPS,導航精度約在±5 m以內,控制方式有人工遙控和自主飛行兩種。
3.遙感設備
此次試驗搭載的遙感設備為135畫幅單反相機及廣角定焦鏡頭,鏡頭標稱焦距28 mm;CMOS傳感器尺寸:36 mm×24 mm,最大像素:6 048像素×4 032像素;CMOS傳感器像點尺寸:5.95 μm。飛行過程中采取飛控系統控制快門定點曝光,將對焦環固定在無窮遠處鎖定相機的內方位元素,并采用固定光圈以保證統一物鏡畸變參數。
三、地面檢校場的建立
為保證無人機飛行試驗的安全性,該檢校場選址于和田某荒漠地區,地理位置為80.2°E,36.97°N,所選檢校場總面積約為3 km2,區域內地形高差約90 m。該區域地貌類型比較單一,地表無明顯人工建筑及自然植被。為了便于辨識及保證定位精度,制作50個90 cm×90 cm的人工控制點標志,按照300 m間距均勻布設10×4個人工地標作為平高控制點,另設10個人工地標作為檢查點。此外,在檢校場選取某處地面紋理密集區域測出14個點的坐標位置作為檢查點,以便后期驗證精度使用。檢校場地面點分布如圖1所示。
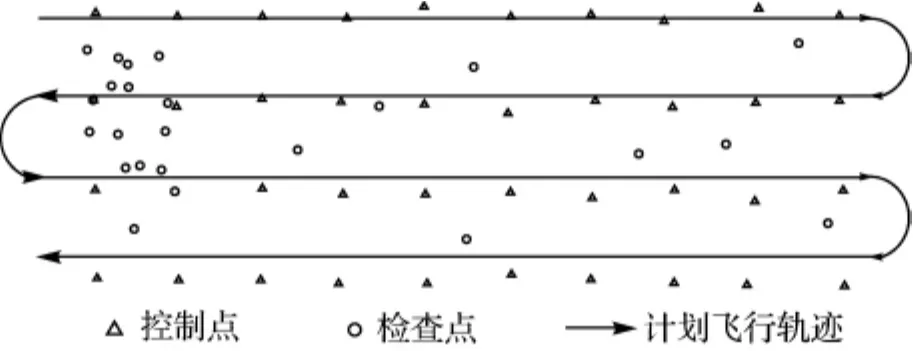
圖1 和田檢校場布點示意圖
所有地面控制點采用RTK實時動態差分法進行測量,所有坐標高程均為WGS-84 ITRF97基準,平面及高程位置精度可保證在±10 cm以內。
四、基于檢校場的航攝試驗
1.試驗數據
本試驗設計飛行拍攝模式為定點曝光,無人機航高為460 m,地面分辨率為10 cm,檢校場影像航向重疊度為60%,旁向重疊度為30%。如圖2所示,該架次影像共有兩組,挑選姿態角符合要求且覆蓋地面已知點較多的兩組影像(A、B兩組)參與后期的平差處理。
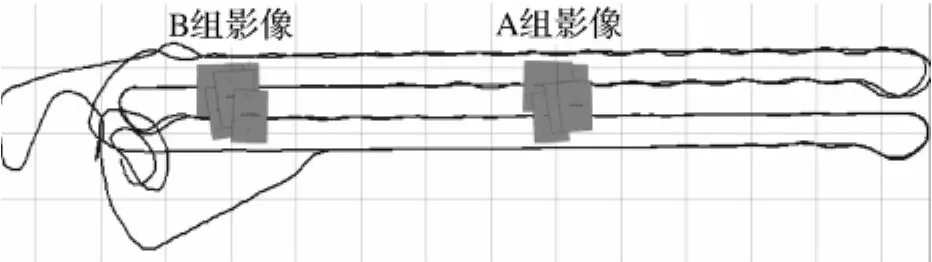
圖2 數據處理中采用的影像圖示
2.相機檢校與測圖精度分析
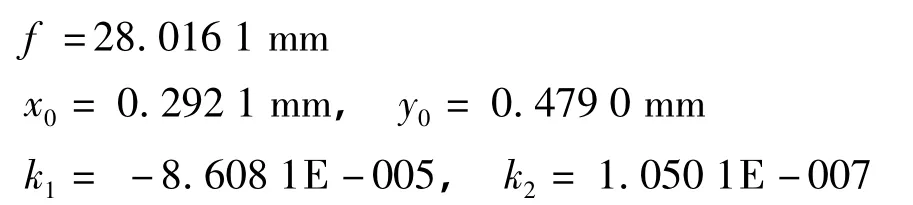
本研究的檢校原理是采用區域網空中三角測量運算中的自檢法,將可能存在的系統誤差,包括相機的實際測量焦距f、像主點偏移值Δx、Δy、物鏡各畸變參數等,作為附加參數引入光束法區域網平差。本文所采用附加參數光束法平差的系統畸變數學模型為[2]
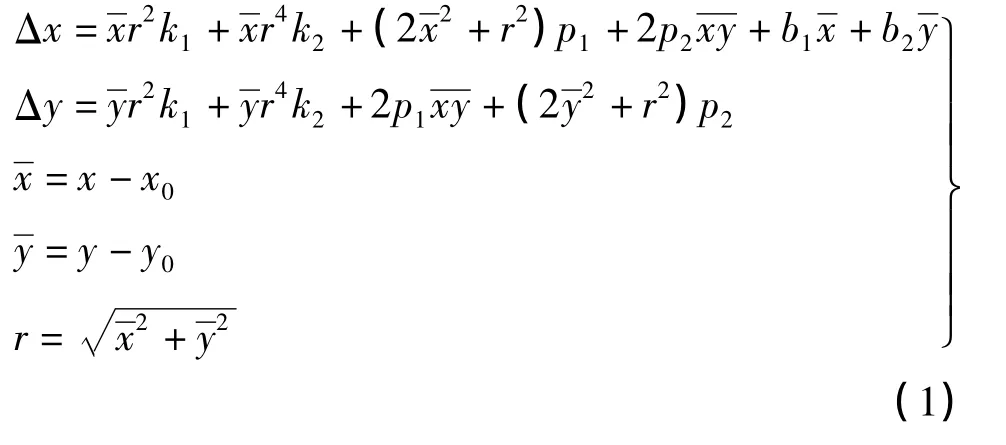
式中,(x,y)是像點在像平面坐標系中的坐標;k1、k2是徑向畸變參數;p1、p2是偏心(切向)畸變參數;b1是像素的非正方形比例因子;b2是CCD陣列排列的非正交性畸變參數。
航帶中選取A組影像進行自檢校平差,A區處于航帶中間位置,包括第2航帶和第3航帶各3幅,對應地表的高差約為 35 m,共有 4個控制點、2個檢查點。為了便于誤差控制,所有后處理過程中均采用UTM 44N投影,通過上述畸變模型對該組影像進行系統誤差計算。檢校結果如下
為了驗證該檢校結果的有效性,選擇地面檢查點密布的B組影像(如圖2所示),在未代入檢校結果前,先采用鏡頭標稱值進行區域網平差,然后對比檢校后的平差結果。平差過程中共采用5個控制點和5個檢查點,試驗表明,在檢校前后檢查點的殘差發生較大變化,具體數值如表1所示。
根據表1中檢查點在檢校前后的殘差變化,檢校后的平面和高程精度均有所改善,其中對高程精度的影響尤為明顯,這表明了檢校結果的有效性。且所有檢查點的平面精度滿足1∶1 000地形圖航空攝影測量內業規范,但高程在相機標定前后都有所超限。
五、分析總結
1.存在的問題及原因分析
(1)航攝效率問題
無人機的飛行高度決定它所受到的天氣影響會遠小于航空遙感及衛星傳感器,但是本次試驗任務中出現了飛行平臺的不穩定性造成的影像姿態角超限。因此在后續的工作中應當提高飛行器平臺的穩定性。
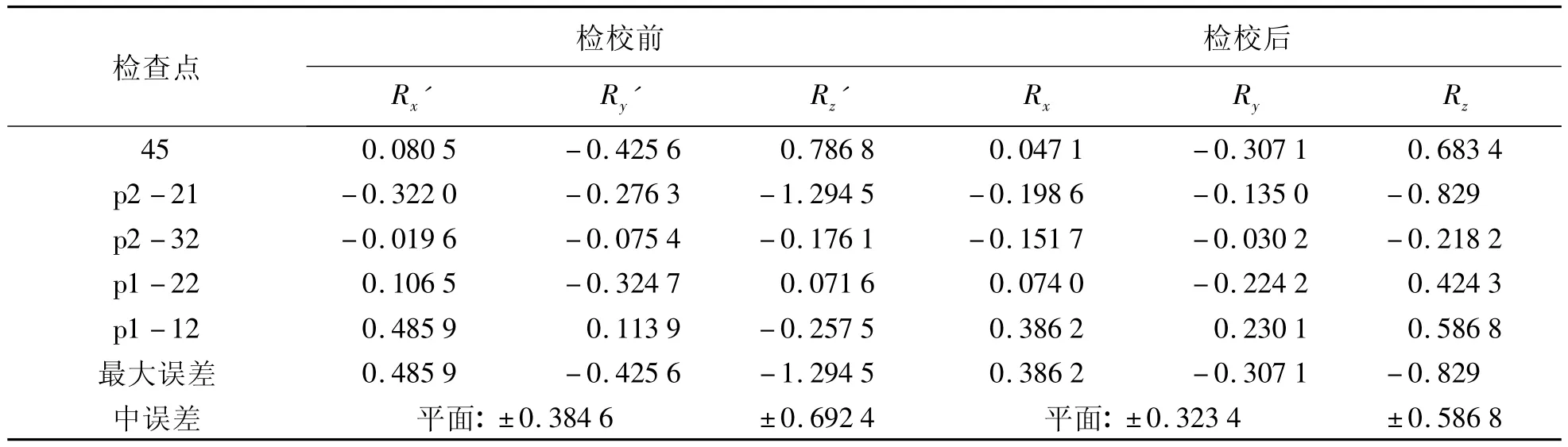
表1 B組影像檢查點的殘差值m
(2)非量測型相機的局限
在航攝比例尺≥1∶4 000的情況下,航偏角一般不大于 10°[3],由于非量測型相機的幅面過小(CMOS傳感器尺寸:36 mm×24 mm),同樣的航偏角對于專業量測型相機仍能滿足重疊度的要求,而對于135畫幅非量測型相機,則會出現攝影漏洞(重疊度<53%)。因此,有必要采取相機拼接的辦法或者選取中畫幅相機以提高像片覆蓋。
(3)測高精度
影像的高程精度是直接由傳感器本身設計的基高比來決定的。理想基高比為1∶1~1∶1.5,本次試驗用到的CMOS傳感器尺寸:36 mm×24 mm,COMS傳感器像點尺寸:5.95 μm,最大像素:6 048像素×4 032像素,焦距28 mm,任務時為窄像對飛行模式,航向重疊度60%。其基高比為

式中,GSD為影像像元的地面分辨率。
因此,要實現無人機大比例尺地形圖立體測繪必須要增大基高比,而增大基高比必須通過增大航向成像寬度或縮短焦距來實現。
2.總 結
本試驗采取135畫幅CCD民用數碼相機,以無人飛行器為平臺進行相對航高為470 m的航攝作業,通過檢校標定成像結果可以滿足1∶1 000地形圖測圖的平面精度要求。試驗表明無人機航攝系統可以云下低空飛行,具有機動、靈活等特點,能夠獲取衛星和有人飛機無法得到的高分辨率影像數據。針對小區域大比例尺的遙感應用,可以作為傳統航空、航天遙感平臺的重要補充。
然而由于本研究試驗條件的局限,不可避免地產生了基高比小、高程精度低的問題。在今后的試驗及應用中可針對不同的航攝目標采取相應措施:如采取寬像對飛行模式、選取短焦鏡頭、增大相機CCD靶面等辦法來增大立體相對像幅覆蓋。
[1] SU J B.Camera Calibration Based on Receptive Fields[J].Pattern Recognition,2007,40(10): 2837-2845.
[2] 王之卓.攝影測量原理[M].北京:測繪出版社,1979.
[3] 中國國家標準化管理委員會.GB/T 7931—2008 1∶500 1∶1 000 1∶2 000地形圖航空攝影測量外業規范[S].北京:中國標準出版社,2008.
[4] 吳云東,張強.立體測繪型雙翼民用無人機航空攝影系統的試驗與應用[J].測繪科學技術學報,2009,26(3):161-169.
[5] 中國國家標準化管理委員會.GB/T 7930—2008 1∶500 1∶1 000 1∶2 000地形圖航空攝影測量內業規范[S].北京:中國標準出版社出版,2008.
[6] 中國國家標準化管理委員會.GB/T 6962—2005 1∶500 1∶1 000 1∶2 000地形圖航空攝影規范[S].北京:中國標準出版社,2005.
[7] PACEY R E,WALKER A S,SCHEIDT M.Calibration ofAnalog and Digital Airborne Sensors at LH Systems[C]∥Proceedings of the 1999 ASPRS Annual Conference.Portland:[s.n.],1999:950-956.
[8] SID-AHMED M A,BORAIE M T.Dual Camera Calibration for 3D Machine Vision Metrology[J].IEEE Trans.Instrum.Meas.,1990,39(3):512-516.
[9] JUN J,KIM C.Robust Camera Calibration Using Neural Network[C]∥Proceedings of IEEE Region 10 Conference.Cheju Island:[s.n.],1999:694-697.
[10] FREED M,HARRIS R,WHALLEY M.Human-interaction Challenges in UAV-based Autonomous Surveillance[C]∥Proceedings of the 2004 Spring Symposium on Interactions between Humans and Autonomous SystemsoverExtended Operations.[S.l.]:AAAI Press,2004.
Analysis of Large-scale Mapping Experiment Using UAV Aerophotographic System
WANG Zhihao,LIU Ping
0494-0911(2011)07-0018-03
P23
B
2011-01-04
王志豪(1978—),男,河南新鄉人,工程師,研究方向為工程測量。
猜你喜歡
城市勘測(2023年5期)2023-11-03 01:32:36
經緯天地(2021年5期)2021-12-27 02:32:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛星與網絡(2015年5期)2015-12-20 09:07:37
衛星與網絡(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09