利用高程二次定向提高無人機航測高程精度的探討
2011-11-15 03:22:36吳巧玲董祥林
測繪通報 2011年7期
吳巧玲,董祥林,高 宇
(1.福建省測繪院,福建福州350003;2.淮北礦業集團公司,安徽淮北234115; 3.武漢海地測繪科技有限公司,湖北武漢430074)
利用高程二次定向提高無人機航測高程精度的探討
吳巧玲1,董祥林2,高 宇3
(1.福建省測繪院,福建福州350003;2.淮北礦業集團公司,安徽淮北234115; 3.武漢海地測繪科技有限公司,湖北武漢430074)
分析航攝像片傾角過大對航測成果的誤差影響及影響程度,并結合實際試驗和應用,發現采用高程二次定向,可以有效地控制高程誤差,從而使最終的航測成果滿足航測規范的精度要求。
高程誤差;像片傾角;精度
一、引 言
隨著無人機航空攝影在測繪行業的推廣和應用,其測量高程精度的控制問題也逐漸成為業界關注的重點。由于無人機體積小、重量輕,在空中飛行姿態容易受到氣流的影響,往往造成航攝像片傾角過大。筆者在多次無人機項目生產實踐中,通過對不同姿態角航攝立體像對和近似理想立體像對的航測高程分析比較,并統計其誤差,發現航攝像片傾角過大,對高程誤差的影響較大,需要采取其他方式,方可實現將高程誤差控制在規范要求的限差范圍內。
二、誤差來源分析
目前,受無人機航高等因素制約,測繪行業通常利用無人機航攝影像測制丘陵或山地地形1∶1 000、1∶2 000比例尺的數字地形圖。依據我國航空攝影測量的技術規范,除特殊困難區域外,要求其內業加密點及高程注記點的高程中誤差不大于表1所示的規定。
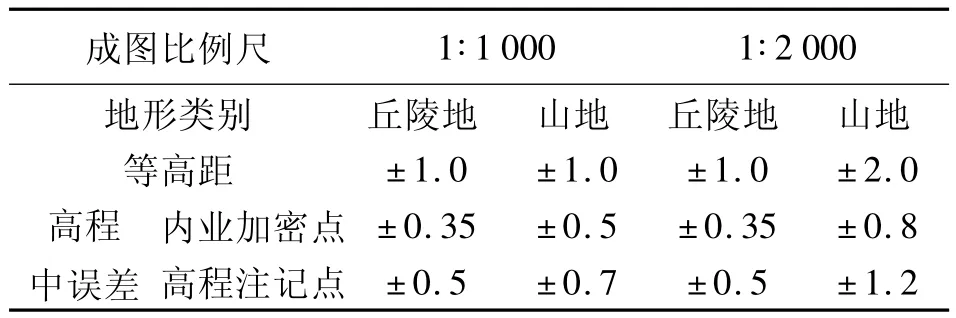
表1 m
攝影測量是建立在豎直攝影基礎之上的,即攝影機主光軸垂直于地面。因此,為了保證攝影測量的立體量測地形圖數據的數學精度,測繪航空攝影規范對測繪航空攝影光軸傾角均有限制。理論上理想立體像對高差公式為[1]

式中,Δp為同名地物左右視差較。
而對于因氣流影響使得影像含有像片傾角的豎直攝影立體像對來說,如果僅以一次項的精度去要求,則應考慮加入左右視差的一次項改正數[1]
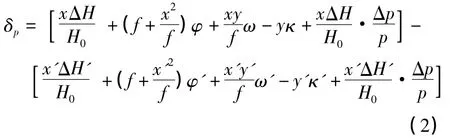
這樣,就把含有像片傾角的Δp改化為理想像對下的Δp。如果未進行一次項改正數的改化,將會使立體模型在高程方面產生變形,即高程扭曲,這一扭曲將在實際生產中影響地形圖的高程精度。
由δΔp引起的高程誤差為
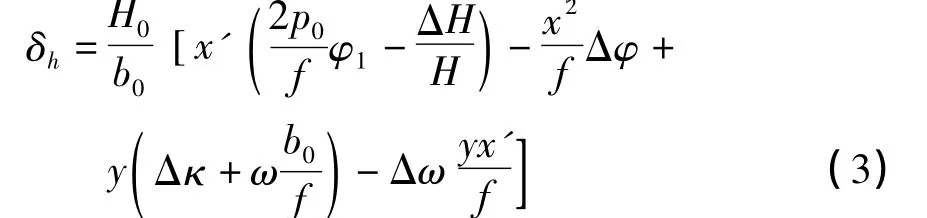
當像對的外方位元素為已知時,式(3)中的像點坐標為變數,則可以將高程扭曲公式表達為

式中,a0、a1、a2、a3、a4為常數系數。
從式(4)可知,由于像片傾角引起的高程誤差曲面為一個雙曲線的拋物面,這一誤差將直接影響立體模型高程量測精度。
在無人機測繪航空攝影中,發生像片傾角超限的可能性要大于常規測繪航空攝影。現有的數據生產流程,首先是通過空中三角測量獲取每張像片的6個外方位元素,然后在數字攝影測量工作站上恢復立體模型進行地形圖測制。在這種作業模式下,通常像片傾角超限的立體模型其高程量測誤差遠遠超過相應比例尺的航測規范要求。
三、不同像片傾角立體量測高程精度分析
對于像片傾角過大引起立體模型超限的問題,筆者在武夷山、松滋核電規劃區等1∶1 000無人機航空攝影測量項目中,對不同像片傾角立體模型采集的航測高程精度進行統計。這兩個測區均屬于丘陵地形,設計航高500 m,相機焦距為45.8 mm,地面實際分辨率為8 cm。具體統計數據如表2所示。
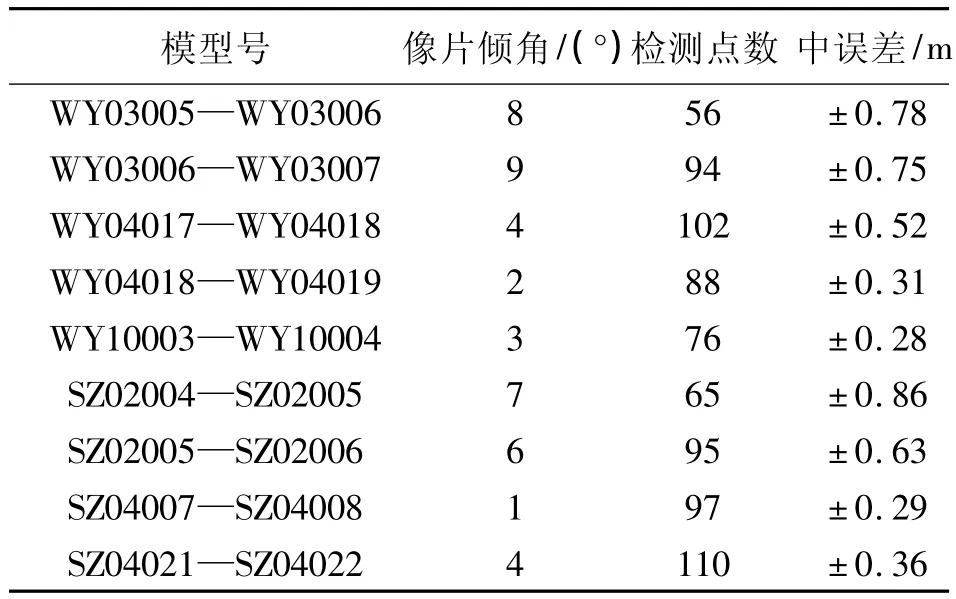
表2 不同傾角立體模型高程量測精度誤差統計
以上統計數據是采用PATB進行光束法平差以后,直接在數字攝影測量工作站恢復立體模型后采集的高程點與野外實測高程點進行對比、統計獲取的中誤差。從表2數據可以得出以下規律。
1)航測內業測量的高程中誤差隨著像片傾角的增大而增大。
2)當像片傾角小于3°時,高程精度可以滿足規范的要求。
四、提高高程精度方法的探討
通過項目實際生產的統計可以得出:在無人機航空攝影測量的過程中,由于無人機的姿態影響,對航測成果高程精度影響較大,較好的像片傾角可以獲取滿足國家技術規范要求的高程精度;像片傾角過大將直接導致航測高程精度超限。而利用無人機航空攝影測繪時,必然存在部分模型像片傾角超限,也就是說,每一測區必然有一定數量的立體模型航測內業數據的高程中誤差超限。如何解決這一問題是本文討論的重點。筆者在利用無人機航空攝影測量項目中,針對像片傾角超限的模型,通過采取以下技術手段來提高立體模型的高程量測精度。
實際上,在利用空三獲取的外方位元素恢復立體模型后,在對像片傾角過大的立體模型絕對定向的過程中,筆者發現盡管絕對定向誤差的殘差很小,但全野外測量的高程控制點仍不能準確地恢復到被量測地物的表面。通過以上分析,認為這是由于像片傾角超限,造成利用PATB光束法平差反算以后該類像片的外方位元素中3個角元素不正確所引起的。
松滋核電規劃區采用高程控制全野外布設方案,對于像片傾角超限的立體像對,筆者采取以下方案:
1)利用空中三角測量進行加密平差,反算出野外高程控制點的平面坐標。
2)在數字攝影測量工作站上恢復立體模型。
3)刪除加密過程的模型連接點,保留全野外測量的像片控制點。
4)保留野外測量的全部像片控制點(包括平高控制點和高程控制點),在立體狀態下,重新觀測野外控制點的高程。
5)重新絕對定向,計算傾角超限的像片6個外方位元素。
6)采集核線,立體采集。
以上方法,稱為高程二次定向,即重新建立立體模型,進行數據采集,并可以將該超限立體模型的高程中誤差控制在1/3等高距以內。
下面是傾角超限立體模型SZ02004-SZ02005通過空三平差后直接恢復模型的絕對定向結果,報告截取如下:
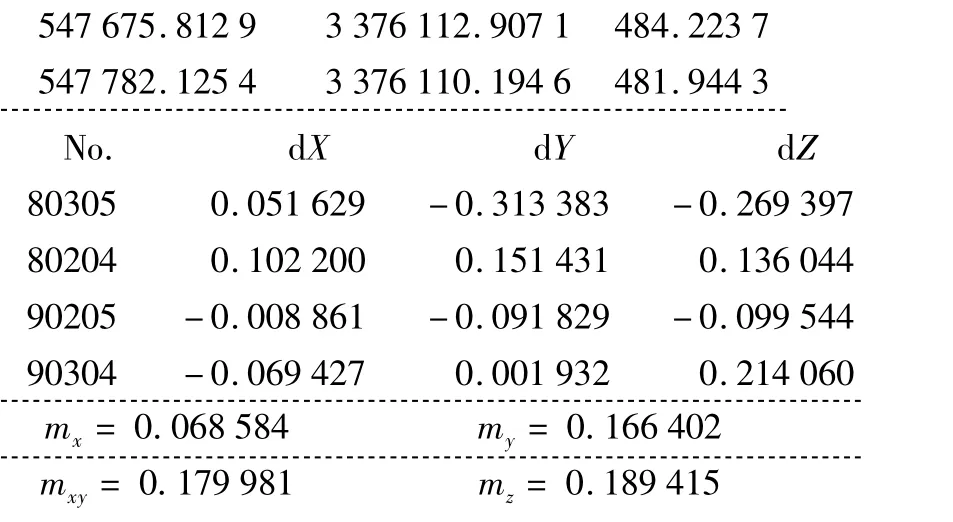
單純從上面數據看,高程誤差滿足規范要求,但實際高程值是錯誤的。下面是利用該模型的兩個平高控制和兩個高程控制(其平面坐標為加密坐標)重新進行高程二次定向后的結果,報告截取如下:


分析上述二次定向結果,通過高程二次定向,對模型外方位元素的線元素Xs和Ys的影響很小,但對Zs的影響約在0.4 m。同時,由外方位元素中3個角元素組成的旋轉矩陣的數值變化也較大,即3個角元素的計算值也發生了變化。
筆者利用高程二次定向的模型,重新采集該模型高程,并統計出其高程中誤差為±0.31 m,可以滿足該項目設計要求。同樣對其他像片傾角較大的立體模型均采用了高程二次定向,并進行中誤差統計,其結果均能滿足規范的要求。
五、結束語
通過以上兩個測區的試驗,筆者發現采用高程二次定向,可以提高利用較大傾角航攝像對測量成果的高程精度,確保最終成果滿足1∶1 000或更小比例尺的航測規范要求。由于RTK的廣泛應用,以及FJCORS的日益完善,全野外布設高程控制點變得十分簡單。在今年的多個無人機航攝的項目中,運用該經驗后,航測成果精度均滿足設計要求。該方法也適用于常規航攝時個別像對傾角超限的情況。
[1] 黃世德.航空攝影測量學[M].北京:測繪出版社,1986.
[2] 張劍清,潘勵,王樹根.攝影測量學[M].武漢:武漢大學出版社,2009.
[3] 喬瑞亭,孫和利,李欣.攝影與空中攝影學[M].武漢:武漢大學出版社,2008.
[4] 國家測繪局.GB/T 6962—2005 1∶500 1∶1 000 1∶2 000地形圖航空攝影規范[S].北京:標準出版社,2005.
[5] 國家測繪局.GB/T 7930—2008 1∶500 1∶1 000 1∶2 000地形圖航空攝影測量內業規范[S].北京:標準出版社,2008.
Discussion of UVA Precision Improvement by Elevation Re-orientation
WU Qiaoling,DONG Xianglin,GAO Yu
0494-0911(2011)07-0012-03
P231
B
2011-01-21
吳巧玲(1970—),女,福建福州人,高級工程師,主要從事航測及遙感數據處理等工作。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00