三維激光掃描儀在林木測量方面的應用
2011-11-15 03:30:00徠卡測量系統上海有限公司
測繪通報 2011年11期
徠卡測量系統(上海)有限公司 李 超 程 浩
南京林業大學森林資源與環境學院 王 芳
徠卡測量新技術應用專欄
三維激光掃描儀在林木測量方面的應用
徠卡測量系統(上海)有限公司 李 超 程 浩
南京林業大學森林資源與環境學院 王 芳
一、引 言
自1995年瑞士徠卡公司推出世界上第一臺三維激光掃描儀的原型產品以來,三維激光掃描技術已經走過了十幾年的歷程。它是繼GPS之后,測繪行業在技術上的又一次飛躍。
傳統的測量方式是單點測量,以獲取單點的三維空間坐標,而三維激光掃描則自動、連續、快速地獲取目標物體表面的密集采樣點數據,即點云,實現了由傳統點測量到面測量的跨越,是一種質的飛躍。同時,獲取信息量也從點的空間位置信息擴展到目標物的紋理信息和色彩信息。三維激光掃描技術擁有許多自己獨特的優勢,如:① 數據獲取的速度快,實時性強;②數據獲取全面,精度高;③全天候作業,不受光線的影響,主動性強;④數據表達清楚明了,表達非常簡單。
本文采用Leica ScanStation C10脈沖式三維激光掃描儀(如圖1所示),結合三維激光掃描儀工作的基本原理,探討從數據獲取到成果得出的整個流程。

圖1 Leica ScanStation C10三維激光掃描儀
二、三維激光掃描的基本原理
三維激光掃描儀采用非接觸式高速激光測量的方法,以點云形式表現目標物體表面的幾何特征。儀器自身發射激光束到旋轉式鏡頭中心,鏡頭通過快速而有序地旋轉將激光依次掃過被測區域,一旦接觸到物體,光束立刻被反射回掃描儀,內部微電腦通過計算光束的飛行時間從而計算出激光光斑與掃描儀兩者之間的距離;與此同時,儀器通過內置角度測量系統來量測每一激光束的水平角與豎直角,進而獲得每一個掃描點在掃描儀所定義坐標系內的X、Y、Z坐標值。三維激光掃描儀在記錄激光點三維坐標的同時也會將激光點位置處物體的反射強度值記錄,并稱之為“反射率”。三維激光掃描原理如圖2所示。
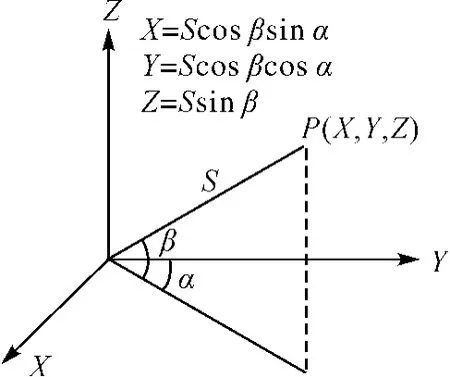
圖2 三維激光掃描原理圖
內置了數碼相機的掃描儀在進行掃描的過程中可以方便、快速地獲取外界物體真實的色彩信息,在掃描、拍照完成后,不僅可以得到點的三維坐標信息,也獲取了物體表面的反射率信息和色彩信息。所以包含在點云信息里的不僅有X、Y、Z和強度信息,還包含每個點的RGB數字信息。
三、應用實例
本次研究是利用C10對南京林業大學試驗林進行掃描,并利用Leica Cyclone軟件對數據進行提取、整理、計算。
1.掃描前的準備工作
對試驗林進行踏勘,確定掃描的測站位置、所需的測站數、掃描的路線以及標靶安放的位置。
2.掃描過程
利用C10進行機載控制,直接對試驗林的點云數據進行獲取。操作過程中采用中等掃描密度(10 m處點間距為1 cm×1 cm)進行掃描,并利用掃描儀內置數碼相機進行拍照,為室內研究提供更多的數據支持。
3.數據預處理
采用Cyclone軟件進行內業數據的拼接及信息的提取。將4站數據合為一體將會得到試驗林的一個完整數據。此次研究,要求精度較高,而且要求速度要快,所以選擇了標靶拼接模式。
4.研究數據的提取
對拼接完成的數據進行去噪處理,提取需要進行研究的區域。
(1)胸徑、樹高的提取方法
從樹林掃描數據中任意分割提取有限株單獨樹木,首先進行人工去噪處理,然后利用Cyclone中的Survey模塊對單株樹木進行胸徑、樹高以及樹冠投影面積等進行計算提取。提取過程如下:
1)分割出一部分點云。此點云里必須包含至少一株完整的樹木。
2)進行人工去噪處理。因為點云顯示的是空間,所以在Cyclone中可以進行任意角度的旋轉查看,并通過不斷地變換視角,進行點云的去噪,以此就可方便準確地得到所需要的單株樹木的點云數據。
3)胸徑的提取。胸徑是指在樹木(林業上稱之為樣木)距地1.3 m處的直徑,稱之為胸徑。根據定義,可以通過點云,查看樹干與地面接觸的位置,從而確定一個最為合適的基準點來確定胸徑的位置。可以以基準點所在水平面為基準建立水平參考面,如圖3所示。
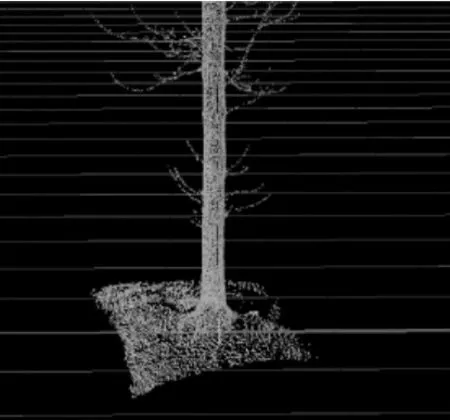
圖3 水平參考面的建立
在Z軸正方向按照1.3 m的間距對水平參考面進行偏移,就得到了胸徑的位置所在。以水平參考面為基準做厚度為0.1 cm的切片,根據點云做最佳擬合,可得到胸徑值=0.180×2=0.36 m。
4)樹高的提取。在ModelSpace窗口中的視圖模式選擇正射視圖,在主視圖中找到樹木的最高點,以最高點為基準建立參考平面。利用Cyclone提供的量測功能就可以得到基準點到最高點所在參考面的距離,即高度。
(2)樹林中單株樹木位置信息的提取
此次測量沒有將坐標系統引入到已知大地坐標系統中去,所以此次得出單株樹木的位置坐標也只是其在測量時使用的假定坐標系統中的坐標,但這都不會對計算過程產生影響。
先確定要進行單株樹木位置信息提取的區域,對所選取區域點云行去噪處理,得到一個比較完整的點云。再根據點云確定一個最接近地面的水平參考面,如果要求的誤差范圍較大,可以對整個區域的樹木確定一個水平參考;如果要求的精度高,就需要對單株樹木確定參考面的位置。以前一種情況為例,根據點云可以找到一個最切合4株樹木的參考面位置,如圖4所示。
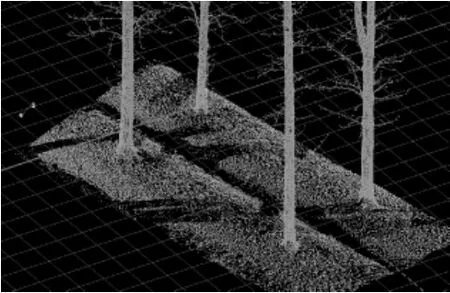
圖4 參考面的確定
以水平參考面為基準做厚度為0.1 cm的切片,得到了4株樹木參考面處的切片點云,再根據點云做最佳擬合,得到4個圓,找到每個圓的圓心位置并創建圓心點,并標記每個圓心的平面坐標。
綜上所述,利用三維激光掃描儀進行林業的調查,不僅在外業掃描時節省了大量的人力、物力,減少了工作者外業作業時間,減輕了勞動強度,而且內業處理時可以根據真實的三維坐標對單株樹木進行胸徑、樹高以及位置信息的提取,而大量點云數據保證了數據的全面性,以及成果的準確性。
四、結束語
地面三維激光掃描作為一種高新技術,在森林資源調查、林分結構研究、單木三維建模等方面有著巨大的應用潛力。一方面,其作為一種能快速、有效獲取測樹因子的新方法,在豐富現有林業資源調查手段的同時,拓展了測樹空間;另一方面,該技術能對反映林分實時、動態變化的樹冠特征以及林分結構等信息進行有效捕捉,并能提供高分辨率的三維點云影像圖,進而有助于構建精準的單木三維模型。本文通過利用徠卡三維激光掃描儀進行數據獲取,并利用單個Cyclone軟件對掃描數據進行后處理,詳細介紹了從數據去噪到最后成果的得出,以及有效信息提取的全過程。
三維激光掃描儀被廣泛應用的同時還存在一定的局限性,比如儀器的價格偏高,應用于樹木掃描時樹冠間有相互遮擋等,這都限制了掃描儀在林業方面的應用。但是隨著社會的發展,科學技術的進步,相信不遠的將來三維激光掃描儀會被大眾所接受,同時也希望這次三維激光掃描儀的運用能為林業工作者在以后的林業調查中提供一些新的思路。
(本專欄由徠卡測量系統和本刊編輯部共同主辦)
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
