工業機器人嵌入式示教盒設計
2011-11-14 07:57:54趙鳳申李愛芹吳文祥
電焊機 2011年12期
關鍵詞:嵌入式
趙鳳申,李愛芹,吳文祥
(1.南通航運職業技術學院 機電系,江蘇 南通 226010;2.浙江大學 流體傳動及控制國家重點實驗室,浙江 杭州 310027)
工業機器人嵌入式示教盒設計
趙鳳申1,李愛芹1,吳文祥2
(1.南通航運職業技術學院 機電系,江蘇 南通 226010;2.浙江大學 流體傳動及控制國家重點實驗室,浙江 杭州 310027)
設計了一種便攜式工業機器人示教盒。在分析示教盒的便攜性要求和人機界面影響因素的基礎上,提出采用ARM7TDMI內核和嵌入式實時操作系統的設計方案;充分利用PS/2鍵盤的特點實現便捷的程序輸入和機器人控制;搭載μ C/GUI和LWIP模塊實現圖形用戶界面和網絡通信;通過分析編程語言語法結構并結合Nand-Flash的讀寫特點實現示教文件的本地存儲和傳輸;并根據語法、詞法結構設計PC端程序解釋器,完成編程語言向執行代碼的轉換。實踐應用表明,該示教盒人機界面友好、運行穩定,具有較強的實用性和一定的擴充能力,能夠顯著提高在線示教的作業效率。
機器人;示教盒;實時操作系統
0 前言
不同的工業機器人編程方式對生產效率影響明顯。其一是離線編程,該方式多與虛擬仿真相結合,對工作環境三維建模,由軟件自動生成程序代碼并經由網絡下載后執行,實現無人值守,但該方式需要精確的三維模型、高技能的操作人員以及完善的自動化生產線,并對機器人的絕對定位精度要求較高,但是其受到末端負載質量等多因素影響,很難保證精度。而在線示教則由示教盒帶動機器人到關鍵點,記錄下該點的坐標和運動模式等信息,最后以指定運動模式復現運動軌跡。在線示教方式需要占用作業時間,但其只要求機器人具有較高的重復定位精度,易于實現。
為提高錢江一號工業機器人在線示教效率,設計了一種基于網絡通信的、人機界面友好的嵌入式式示教盒。
1 示教盒功能定位和方案規劃
示教盒作為人機交互的關鍵接口,其操作界面的友好程度直接影響作業效率。一般來說,示教盒主要功能分為兩部分:一是機器人參數設定和讀取,如切換坐標系統、設置焊接參數、工具參數校正、關節位置設定等;二是示教文件的生成、讀取、保存和傳輸。為提高人機交互的便利性,示教盒應具備可視面積較大的液晶顯示屏、豐富的圖文信息顯示和狀態提示、較多的操作按鍵、指示燈等輔助提示功能;同時,應具有便攜性,重心適中,降低人員的手部負擔,并采用容錯性好的高速通信協議等。
2 系統硬件設計
傳統MCS-51單片機系統小巧、價格低廉,但是片內資源和運行頻率受限,無法加載優秀軟件平臺和人機界面,而嵌入式工控主板性能強勁,但體積、功耗偏大,功能冗余。在此采用ARM主控方案,該處理器采用高效的精簡指令集,片載資源豐富,擴充能力強,能夠植入多種嵌入式操作系統,方便加載圖形用戶界面和網絡協議棧等,具有較強的定制開發能力。
顯示屏作為人機交互的關鍵界面,其交互性、易讀性和提示性將直接影響人機交互的效率。當前,各廠商示教盒大多采用色彩、圖形、文字等要素作為人機交互引導媒介,大多整合了觸摸屏。本設計中采用640×480點陣256色LCD,內部自帶刷新電路,屏幕附載電阻式觸摸屏,通過SPI總線將觸摸點的相關信息發送至主控制器,根據需要將液晶屏幕劃分系統狀態提示區、緊急狀態提示區、主菜單區、公用顯示區(實現次級菜單顯示、程序編輯顯示、運行過程提示等),不同區域使用不同的背景色加以區分,提高視覺辨識度。
鍵盤是人機交互的另一重要途徑。在示教盒上,主要完成以下功能:程序編輯與數字錄入、關節控制與速度切換、外部設備控制、急停等。鍵位分布遵循易用、安全的原則,對于同功能區的常用鍵左右對稱分布,實現雙手操作,提高輸入效率;外部設備控制、運轉測試等功能鍵必須雙手雙鍵操作,避免誤觸按鍵引起安全問題,部分輔助按鍵與觸屏點擊功能相同,實現對LCD功能區域間和區域內的切換,提高人機界面的友好性。
示教盒總計需要按鍵60個以上,傳統矩陣式鍵盤占用較多的I/O口和掃描時間,盡管8279最多能擴充至64個按鍵,但也略顯不足。本示教盒采用計算機用PS/2鍵盤芯片82K628A,最多可擴充至128個按鍵,使用PS/2協議與處理器通信,只需占用兩個I/O口。本設計中采用第三套編碼,它能夠設定單個按鍵只發送“通碼”(Make Code,按鍵按下)、“斷碼”(Break Code,按鍵彈起)或機打碼(Typematic,按鍵按住后周期性發送編碼),由于機打碼周期性發送,對于關節連續運轉、速度調節、方向控制按鍵來說十分方便,否則必須由操作人員反復按鍵或由處理器判斷鍵盤通斷時間,實現連續可調。而部分功能性按鍵(如坐標切換)則只需要設定通碼即可。
為保障人員、設備安全,在示教盒、機柜上設置有急停按鈕,而機器人末端的碰撞傳感器、安全護欄信號同樣作為急停信號處理,急停信號采用硬件直連。由于焊接過程干擾較大,急停按鈕距離控制柜較遠,因而對于急停開關信號采用電流環變送至主控制器,經或門運算后直接驅動伺服電機繼電器使伺服電機斷電,并將該信號送至主控制器外部中端口,主控制器進入外部中斷服務程序,通過I/O口讀入8-3譯碼器(74LS148)輸出,進而判斷何處出現故障,并將故障信息采用網絡方式發送至示教盒,提示用戶操作。急停控制電路如圖1所示。
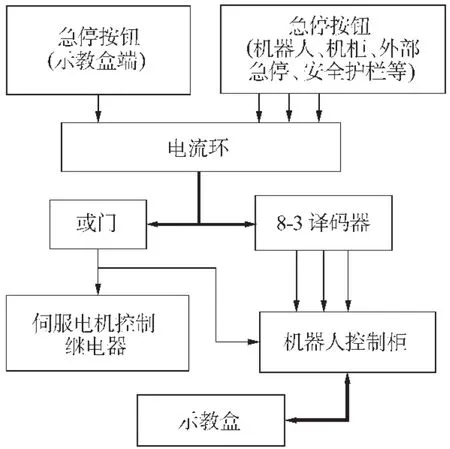
圖1 急停按鈕電路結構
示教盒與主控制器之間采用以太網通信,該通信方式效率高、速度快、實時性強,便于控制命令和程序文件的傳輸。同時,以太網擴展性強,加入路由等網絡設備即可通過示教盒實現多機器人控制,或由遠程控制中心實現離線編程等功能。
示教盒采用Nand-Flash存儲程序代碼和用戶示教程序,使用Nor-Flash存儲系統程序代碼,配備SRAM作為系統運行內存,以太網芯片RTL8019AS完成網絡通信,以上芯片采用總線的方式與處理器相連接。圖2為系統硬件原理框圖,圖3為示教盒實物圖。

圖2 示教盒硬件結構框圖

圖3 示教盒實物
3 系統軟件設計
機器人示教盒需要多個任務同時運行,如屏幕顯示、網絡傳輸、示教文件讀寫、鍵盤響應等,為了提高其實時響應性能,使用實時操作系統完成任務切換和優先級管理。而為提高系統的人機交互性能,充分利用系統硬件資源,則需要開發合適的圖形用戶界面(GUI)。
本示教盒移植μ C/OS-II實時操作系統,并在其上移植μ C/GUI和LWIP協議棧,用以完成人機界面設計和以太網通信。
3.1 μ C/OS-Ⅱ操作系統的移植
μ C/OS-Ⅱ是一個輕量級占先式實時操作系統,其內核小巧,實時性強,源碼開放移植方便,易于開發維護,最多能夠管理56個用戶任務,利于擴展。
μ C/OS-Ⅱ在S3C44B0X上的移植已經比較成熟[1],經過移植后,采用OSTaskCreate()函數完成任務的創建。
3.2 μ C/GUI的移植
μ C/GUI是廣泛應用于嵌入式系統中的圖形界面系統,包括豐富的二維繪圖庫、多字體、位圖、彩色和灰度顯示功能,并具備Windows風格對話框和各種控件(按鈕、編輯框、滑動條等)以及與觸摸屏設備的接口,其輕量級的特性十分適合在示教盒中使用。其移植主要通過修改配置文件等,使之與具體硬件平臺匹配[2],用戶通過調用μ C/GUI系統層提供的API,實現圖形界面的繪制。
3.3 LWIP功能模塊的移植
LWIP是由瑞士計算機科學院的Adam Dunkels等開發的一套輕量級TCP/IP協議棧,ROM和RAM占用較低,示教盒采用該協議棧完成與主控制器的通信與控制。通過修改在/src/arch目錄下的文件既可以完成協議棧的移植[3]。
4 解釋器設計
由于工業機器人的操作人員多為一線工人,要求機器人編程語言簡潔易學,直觀易讀,而機器人工作流程相對固定,因而編程語言多采用面向任務的描述性語言,如VAL、VAL-II語言等,該類語言上下文語句的關聯耦合較弱,代碼長度有限,語句結構多采用“操作方法+操作數據”的結構形式:
MOVJ VJ=25 PL=1
上述語句含義為以關節插補方式,以全速25%的速度運轉到目標點,位置接近等級為1,目標點的數據包含在語句中,但為視圖簡潔并未顯示。用戶輸入過程中,屏幕提示該語句的語法結構,由用戶切換可選的操作方法和操作數據,完成語句的格式化輸入,因而該種編程方式極少出現語法、詞法方面的錯誤。綜合該語言的以上特點,并且限于嵌入式系統的性能,示教文件由示教盒端輸入和存儲,而由主控制器完成解釋和運動規劃,并且簡化解釋器的詞法、語法結構分析功能[4-5]。
4.1 示教文件的結構與存儲
本示教盒的示教文件主要存儲于Nand-Flash (K9F5608)中,可經網絡發送和接收。該Nand-Flash總計2 048塊(block),每塊32頁(page),每頁512字節(bytes),由于示教文件一般語句不多,每個語句占用24字節(見表4),而Nand-Flash按頁讀寫、按塊擦除,為操作方便,每塊存儲一個示教文件(其中包含文件名等信息)程序語句最大約680行,基本能夠滿足實際生產需要。Nand-Flash的第一塊用作索引區,記錄哪些塊被占用,便于檢索時識別。

表4 示教語句的存儲結構
由于示教文件執行添加、刪除等編輯操作,使得同一示教文件的存儲關系和語句順序打亂,因而示教文件內前后語句的關聯關系采用鏈表鏈接,鏈表結構為:

刪除、修改、添加語句操作對應的都是鏈表節點的回收和變更,如果MotionType代碼為0x00則表示程序結束,該鏈表結構同樣適用于其他功能語句,如起弧ARCON等。
4.2 程序解釋器的實現流程
示教程序的解釋工作主要由主控制器的工控機完成,在其上利用Embedded Visual C++編寫解釋程序,完成示教文件的網絡接收,利用正向運動學計算目標點坐標,按照指定的運動模式完成路徑軌跡規劃,再利用逆向運動學生成關節脈沖數,經過多軸控制器驅動電機運動或驅動外部設備。
示教解釋器的工作流程采用有限狀態機(FSM)實現,通過讀取示教文件的關鍵字代碼(如0x10代表MOVJ)作為狀態切換觸發信號,該狀態內的動作為對數據進行處理;而對于關聯性語句(如四個MOVC語句描述一個封閉圓)進行預讀,再次使用其內部的條件語句完成語句解析。具體程序實現上采用C語言中的switch-case語句完成狀態切換。
5 實物運行效果及結論
圖4為在經由示教盒輸入程序完成的圓弧和直線軌跡的焊接,實際焊接效果良好,證實了示教盒方案的適用性。

圖4 實際焊接效果
大量使用證明,示教盒運行穩定可靠,人機界面友好,尤其是屏幕、觸摸屏、鍵盤配合極大地提高了輸入效率,便攜性好,系統實時性強,能夠快速響應輸入命令,在本機上實現了示教文件的讀寫。并且,通過示教盒與機器人控制器聯網通信,完成了本體關節、外部設備控制,系統狀態讀取,示教文件的發送、接收、本地存儲和列表顯示,控制器端的解釋器能夠完成示教文件的解釋并最終機器人代碼。網絡通絡通訊穩定可靠。控制柜、示教盒、機器人本體上的緊急信號能夠快速匯總顯示示教盒上。
[1]韓志耕,王 健.實時內核uC/OS-II在S3C44B0X上移植的研究與實現[J].計算機工程與設計,2006,27(5):828-830.
[2]徐寶國,宋愛國.基于UCOS和UCGUI的嵌入式數字示波器[J].測控技術,2007,26(7):7-8.
[3]曾繁沖,羅代升,蘇 毅.基于UC/OS-II的UCGUI和LWIP資源整合的研究[J].成都信息工程學院學報,2007,22(5):614-617.
[4]陳 英.編譯原理[M].北京:北京理工大學出版社,2001.
[5]王 浩,謝存禧.開放式機器人解釋器的研究[J].機械設計與制造,2010(8):167-168.
Design of embedded teaching-programming pendant for industrial robot
ZHAO Feng-shen1,LI Ai-qin1,WU Wen-xiang2
(1.Department of Mechanical Engineering,Nantong Shipping College,Nantong 226010,China;2.State Key Lab of Fluid Power Transmission and Control,Zhejiang University,Hangzhou 310027,China)
A teaching-programming pendant of portability and rapid input for industrial robot is designed.By analyzing the influencing factor of portability and user-friendly interface,a scheme is advanced based on ARM7TDMI and embedded real-time operation system,which makes the best of PS/2 keyboard for program input and robot remote control,and transplants μ C/GUI and LWIP to realize graph user interface and Ethernet communication.A program interpreter and local storage methods of program files is raised in consideration of the syntactic structure of programming language and read-write processes of Nand-Flash,then the robot can go into operation by the codes generated from the interpreter.Practices proves that this teaching pendant is user-friendly,efficient,practical,stable,and of strong expandability.
robot;teaching-programming pendant;RTOS
TG409
B
1001-2303(2011)12-0009-04
2011-08-24
南通市應用研究計劃資助項目(K2010033)
趙鳳申(1982—),男,河南商水人,講師,碩士,主要從事機器人應用技術的研究工作。
猜你喜歡
家庭影院技術(2021年7期)2021-08-14 02:58:44
電子制作(2019年7期)2019-04-25 13:17:14
成都信息工程大學學報(2018年4期)2019-01-23 06:57:18
電子制作(2018年18期)2018-11-14 01:48:16
電子制作(2018年16期)2018-09-26 03:27:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
制造技術與機床(2017年3期)2017-06-23 08:11:50
電子制作(2017年8期)2017-06-05 09:36:15
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13