一種面向系統(tǒng)狀態(tài)參數(shù)預(yù)報的過程神經(jīng)網(wǎng)絡(luò)模型及其算法
2011-11-12 00:56:54龐躍武許少華
東北石油大學(xué)學(xué)報 2011年6期
龐躍武, 許少華
( 東北石油大學(xué) 計算機與信息技術(shù)學(xué)院,黑龍江 大慶 163318 )
0 引言
控制領(lǐng)域和系統(tǒng)仿真技術(shù)應(yīng)用研究的一個重要方向是非線性動態(tài)系統(tǒng)狀態(tài)預(yù)報.狀態(tài)預(yù)報是根據(jù)系統(tǒng)歷史運動狀態(tài),通過模型或算法判斷和識別系統(tǒng)當前運行狀況是否正常,并可準確預(yù)測系統(tǒng)未來時間內(nèi)運行狀態(tài),其核心是系統(tǒng)辨識和預(yù)測,其關(guān)鍵在于建立符合實際的預(yù)測模型[1].傳統(tǒng)方法解決系統(tǒng)狀態(tài)預(yù)報問題時,主要為基于機理模型或統(tǒng)計模型的預(yù)報,但實際中一些系統(tǒng)存在高度復(fù)雜性和不確定性,難以獲得正確數(shù)學(xué)模型,有些理論和技術(shù)問題尚未得到較好解決[2-3].隨著狀態(tài)預(yù)報應(yīng)用領(lǐng)域不斷擴大,對預(yù)報模型和方法提出更高性能要求.智能信息處理技術(shù)的廣泛應(yīng)用,為解決系統(tǒng)狀態(tài)預(yù)報問題提供新的途徑[4-6].過程神經(jīng)網(wǎng)絡(luò)(Process Neural Network, 簡稱PNN)是一種新型動態(tài)神經(jīng)網(wǎng)絡(luò)模型[7-8],其輸入及連接權(quán)可以為時間函數(shù),對非線性系統(tǒng)動力學(xué)性質(zhì)、模態(tài)變化特征具有自適應(yīng)學(xué)習(xí)能力.將PNN應(yīng)用于非線性系統(tǒng)的狀態(tài)預(yù)報,機制上具有較好的適應(yīng)性.
筆者提出一種基于PNN的系統(tǒng)狀態(tài)參數(shù)預(yù)報模型及其算法.考慮系統(tǒng)結(jié)構(gòu)和變量之間的變換及約束關(guān)系,根據(jù)獲得的反映系統(tǒng)模態(tài)變化特征的動態(tài)樣本數(shù)據(jù),首先建立反映系統(tǒng)動力學(xué)特性的PNN辨識模型;然后依據(jù)辨識模型和系統(tǒng)狀態(tài)參數(shù)的模態(tài)變化特征,構(gòu)建滿足實際應(yīng)用要求的預(yù)報模型.考慮實際中非線性動態(tài)系統(tǒng)往往難以獲得足夠多的時變采樣樣本數(shù)據(jù),建立一種基于相空間重構(gòu)理論的動態(tài)樣本訓(xùn)練集構(gòu)造方法.分析PNN預(yù)報模型的信息處理機制,給出相應(yīng)求解算法,通過實驗驗證模型和算法的有效性.
1 過程神經(jīng)網(wǎng)絡(luò)模型
1.1 過程神經(jīng)元模型

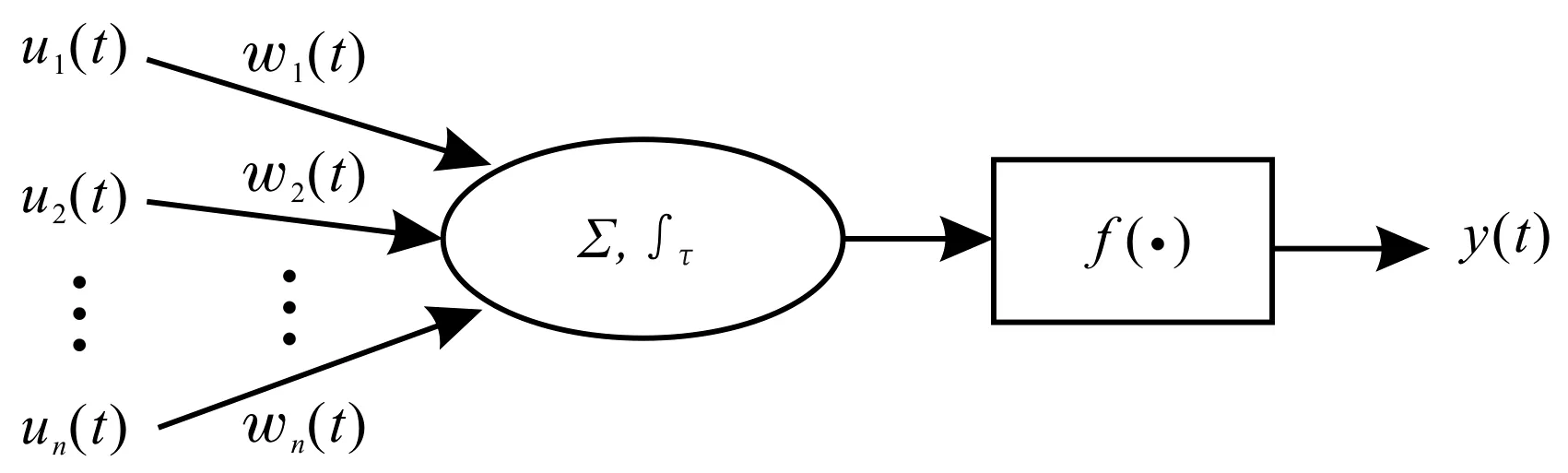
圖1 過程神經(jīng)元模型
由圖1,過程神經(jīng)元模型輸入與輸出之間的映射關(guān)系為
(1)
式中:θ(t)為過程神經(jīng)元的閾值函數(shù).
1.2 過程神經(jīng)網(wǎng)絡(luò)模型
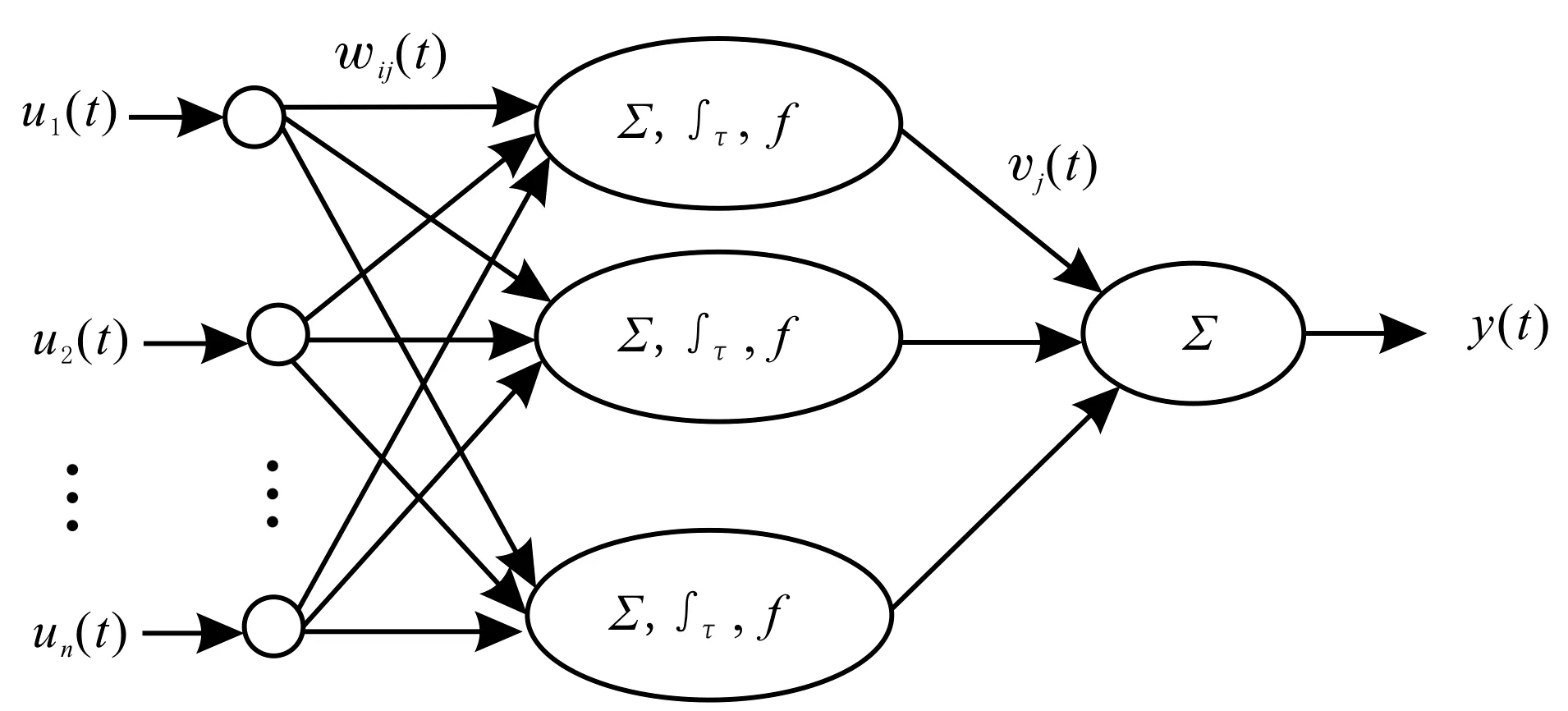
圖2 過程神經(jīng)網(wǎng)絡(luò)模型
為不失一般性,設(shè)非線性動態(tài)系統(tǒng)為多輸入、單輸出的連續(xù)時間系統(tǒng).考慮一種由n個時變信號輸入節(jié)點、m個過程神經(jīng)元隱層節(jié)點和1個非時變神經(jīng)元輸出節(jié)點組成的PNN模型,其拓撲結(jié)構(gòu)見圖2.其中:u1(t),u2(t),…,un(t)為PNN的時變輸入函數(shù);wij(t)(i=1,2,…,n;j=1,2,…,m)為輸入層與隱層的連接權(quán)函數(shù);vj(t)(j=1,2,…,m)為隱層到輸出節(jié)點的連接權(quán)函數(shù);f(·)為激勵函數(shù);y(t)為輸出函數(shù).
由圖2,PNN模型輸入與輸出之間的動態(tài)映射關(guān)系為
(2)
式中:[0,T]為時變信號輸入過程區(qū)間;θj(t)為閾值函數(shù).該模型可以實現(xiàn)系統(tǒng)輸入與輸出之間的連續(xù)時間同步非線性映射關(guān)系.
2 基于PNN的狀態(tài)預(yù)報模型及其算法
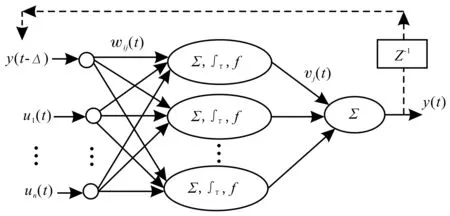
圖3 PNN狀態(tài)預(yù)報模型
考慮系統(tǒng)長期和短期狀態(tài)參數(shù)預(yù)報問題,在PNN模型中(見圖2),將系統(tǒng)的輸出延時串聯(lián)反饋至網(wǎng)絡(luò)輸入端,構(gòu)建一種PNN狀態(tài)預(yù)報模型(見圖3).其網(wǎng)絡(luò)結(jié)構(gòu)利用系統(tǒng)在t時刻的輸入和t-Δ時刻(Δ為系統(tǒng)的1個時間延遲單元)的狀態(tài)信息,預(yù)測系統(tǒng)在t時刻的輸出,有利于預(yù)報模型的穩(wěn)定和對系統(tǒng)輸出信號的控制及約束.
由圖3可見:PNN的輸入層有n+1個節(jié)點,輸入為u1(t),u2(t),…,un(t),系統(tǒng)在t時刻的延時輸出為y(t-Δ),當t≤Δ時,y(t-Δ)=0;網(wǎng)絡(luò)隱層的m個過程神經(jīng)元節(jié)點完成對系統(tǒng)時變輸入信號的時空加權(quán)聚合,以及對動態(tài)樣本過程模態(tài)特征的提取;輸出層完成隱層各節(jié)點輸出信號的加權(quán)聚合,以及系統(tǒng)狀態(tài)參數(shù)的輸出.
由圖3,PNN狀態(tài)預(yù)報模型輸入和輸出之間的映射關(guān)系為
(3)
式中:w0j(t)為對應(yīng)于y(t-Δ)的輸入節(jié)點與網(wǎng)絡(luò)隱層過程神經(jīng)元節(jié)點的連接權(quán)函數(shù),當t∈[0,Δ]時,w0j(t)=0.
式(3)表示的PNN狀態(tài)預(yù)報模型的輸入、輸出以及連接權(quán)、閾值等可以是任意類型的時間函數(shù),只要輸入未來時間的過程影響因素,就可采用該模型預(yù)報系統(tǒng)的長期和短期狀態(tài).在模型訓(xùn)練中,若不將連接權(quán)函數(shù)和閾值函數(shù)的類型限定在某一類函數(shù)空間,則難以通過訓(xùn)練函數(shù)樣本集的學(xué)習(xí)確定.為此,采用一種基于函數(shù)正交基展開的學(xué)習(xí)算法[9],并將時變信號的輸入?yún)^(qū)間[0,T]擴展為任意的(0,t]∈[0,T].
設(shè)PNN的輸入、輸出函數(shù)屬于(C[0,T])n;b1(t),b2(t),…,bL(t)為C[0,T]中1組滿足輸入函數(shù)擬合精度要求的基函數(shù);U(t)為網(wǎng)絡(luò)輸入空間中的任意函數(shù),U(t)=(u1(t),u2(t),…,un(t)),ui(t)的基函數(shù)展開形式表示為
(4)
式中:L為基函數(shù)的項數(shù).
將式(3)連接權(quán)函數(shù)wij(t),vj(t)和閾值函數(shù)θj(t)用基函數(shù)b1(t),b2(t),…,bL(t)的形式展開,表示為
(5)
(6)
(7)
將式(4—7)代入式(3),并整理得
(8)

(9)

對[0,T]進行適當?shù)腜等分,記分割點為t0,t1,…,tP.將式(5-8)另寫為
(10)
(11)
(12)
(13)
將式(10-13)代入式(9),整理得
(14)
由于bi(t)在[0,T]上為確定函數(shù),因此采用數(shù)值計算方法求出Bls(t)和Bkl(t)在[0,T]中每個分割點的值.此時,利用一般神經(jīng)網(wǎng)絡(luò)的訓(xùn)練方法如誤差反傳播等梯度下降算法[10-11],確定網(wǎng)絡(luò)連接權(quán)函數(shù)和閾值函數(shù),構(gòu)建系統(tǒng)參數(shù)狀態(tài)預(yù)報模型.
3 基于相空間重構(gòu)的訓(xùn)練樣本集
一些實際系統(tǒng)受測量成本、采樣數(shù)據(jù)不可重復(fù)獲得等因素制約,對時間序列數(shù)據(jù)中隱含的系統(tǒng)本質(zhì)規(guī)律認識不足.為充分利用所獲得的時間采樣數(shù)據(jù)序列中信息,采用相空間重構(gòu)方法構(gòu)造樣本集.
Yk=(yk,yk+t,…,yk+(m-1)τ),k=1,2,…,M,
(15)
(16)
選擇CR在第1個拐點處的延遲時間為重構(gòu)相空間的τ.在確定τ之后,采用G-P算法[13]確定最小嵌入維數(shù)m;根據(jù)最小嵌入維數(shù)m和時間延遲τ,將(yk,yk+τ,…,yk+(m-1)τ)用適當?shù)恼换瘮?shù)擬合為1個時間函數(shù)yk(τ)作為PNN的輸入,得到M-1個樣本,其中:k=1,2,…,M-1.
4 實例應(yīng)用
石油開采是復(fù)雜的多相流體滲流過程,井組先導(dǎo)性開發(fā)試驗中采油速度控制和預(yù)測是制定合理開發(fā)方案的重要依據(jù).實驗數(shù)據(jù)采用某油田開發(fā)試驗區(qū)B7-307注聚合物開采井組生產(chǎn)數(shù)據(jù),研究目標是分析注聚井的注入壓力、注入量與井組采油速度之間的關(guān)系.試驗井組由1口中心注聚合物井、周圍近似均勻分布的3口采油井構(gòu)成注采系統(tǒng),進行不同注入壓力和注聚合物量下油層驅(qū)替采油過程實驗,記錄每口油井階段累積采油量,換算為井組采油速度,采樣時間間隔為4 h,得到1207個采樣數(shù)據(jù).采用相空間重構(gòu)方法構(gòu)造預(yù)報模型訓(xùn)練樣本集,選定最小嵌入維數(shù)為20,延遲時間τ為45個采樣點,得到352組訓(xùn)練樣本.將訓(xùn)練樣本集中每個樣本利用Walsh正交函數(shù)系[14]擬合為1個分段函數(shù),當Walsh基函數(shù)個數(shù)為32時,滿足采樣數(shù)據(jù)擬合精度要求.
確定采油速度PNN狀態(tài)預(yù)報模型結(jié)構(gòu)為4-8-1,輸入為注入壓力函數(shù)、注聚合物量函數(shù)、井組儲量遞減函數(shù)以及延遲1個時間單元的采油速度函數(shù),輸出為采油速度預(yù)報值.學(xué)習(xí)效率α=0.60,β=0.50,γ=0.65;學(xué)習(xí)精度ε=0.10,網(wǎng)絡(luò)學(xué)習(xí)1 532次后收斂.模型預(yù)報結(jié)果與生產(chǎn)數(shù)據(jù)對比,在采樣點處平均絕對誤差為1.3%,相對誤差為5.7%,對油田生產(chǎn)是較準確的預(yù)測結(jié)果.
5 結(jié)束語
提出一種基于過程神經(jīng)網(wǎng)絡(luò)的非線性動態(tài)系統(tǒng)狀態(tài)預(yù)報模型及其算法.根據(jù)反映實際系統(tǒng)模態(tài)變化特征的時變輸入和輸出樣本數(shù)據(jù),利用過程神經(jīng)網(wǎng)絡(luò)對非線性系統(tǒng)的辨識建模能力,直接建立動態(tài)系統(tǒng)面向狀態(tài)參數(shù)的預(yù)報模型,方法具有通用性.該模型和算法為非線性動態(tài)系統(tǒng)的狀態(tài)預(yù)測問題提供一種新方法,具有廣泛應(yīng)用價值.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
