多變量智能協調控制系統設計應用①
2011-10-30 01:58:15鄭亞鋒陳西杰
電力系統及其自動化學報 2011年1期
鄭亞鋒, 陳西杰
(國核電力規劃設計研究院, 北京 100094)
多變量智能協調控制系統設計應用①
鄭亞鋒, 陳西杰
(國核電力規劃設計研究院, 北京 100094)
針對火電機組被控對象非線性、遲滯、燃料大慣性并存的特性,建立了330 MW單元機組協調控制系統非線性模型,并對此模型在額定工況點下進行線性化,以此線性化模型為基礎,在機組原有的協調控制系統中增加多變量解耦控制器,進而設計出與之對應的多變量協調控制系統,并通過工程試驗與機組原有的協調控制效果相比較,實際結果證明了多變量智能協調控制系統的有效性和實用性。
解耦控制; 多變量控制; 協調控制; 控制模型
火電機組被控對象通常是具有非線性、參數慢變以及遲滯與大慣性并存的多變量系統,其中單元機組協調控制系統的設計與投運一直是熱工自動化領域的重要研究課題之一。文獻[1]采用機理分析和數據擬合的方法,建立了330 MW機組滑壓運行方式下大范圍變負荷的模型,該模型具有簡化的形式和較低的階次,能夠反映機組的基本動態特性和非線性,經過機組運行數據驗證,該模型具有較好的復現性,可用于控制系統的設計和控制算法的性能評價;文獻[2]介紹了協調控制系統多變量解耦設計的基本思想;文獻[3]根據單元機組的低階非線性模型,經過適當的簡化,推導出一個雙入雙出、能夠描述機組動態特性及機爐間相互耦合關系的傳遞函數矩陣,以該矩陣為基礎,采用多變量內模控制IMC(internal model control)方法對單元機組協調控制系統進行設計,為方便在實際工程中實現,推導出該控制器的比例積分微分PID(proportion integration differentiation)實現形式,仿真表明該控制器具有良好的解耦效果和負荷適應能力。
本文根據文獻[1]建立330 MW亞臨界機組簡化模型,以此簡化模型為基礎設計多變量協調控制器。通過實際工程應用對比得出多變量協調控制器比原有控制器具有更加優良的控制性能,而且此協調控制策略現場調試方便簡易,具有良好的工程實用意義。
1 機組模型的建立
在此針對內蒙達電亞臨界330 MW單元機組建立協調控制系統低階非線性模型。該機組鍋爐為北京B&W公司制造的B&WB-1025/18.44-M亞臨界一次中間再熱單汽包自然循環煤粉爐;汽輪機為北重-阿爾斯通公司生產的T2A-330-30-2F-1080亞臨界一次再熱三缸雙排汽凝汽式汽輪機,此機組在國內火力發電廠中具有一定代表性。如圖1該機組模型不僅反映了系統間的能量平衡關系,而且體現了系統中存在的非線性特征。
根據現場試驗所得到的實際數據,結合文獻[1]的330 MW建模方法,得到達電亞臨界330 MW機組簡化模型為
(1)
(2)

(3)

(4)
pt=pb-0.000 138(6.31rB)1.5
(5)

汽輪機調節級壓力可以描述為p1=ptμT/100。
圖1中,B為進入爐膛的燃料量(爐側控制量,t);μ為主蒸汽調節閥開度(機側控制量,%);N為汽輪機的輸出功率,MW;pT為主蒸汽壓力(主蒸汽調節閥前壓力MPa);pD為汽包壓力,MPa;pSH為從汽包到主蒸汽調節閥的壓力降,MPa;DQ為鍋爐受熱面總有效吸熱量,%;DT為進入汽輪機的蒸汽量;c為鍋爐及蒸汽管道的蓄熱系數;kSH為過熱器管道的阻力系數。
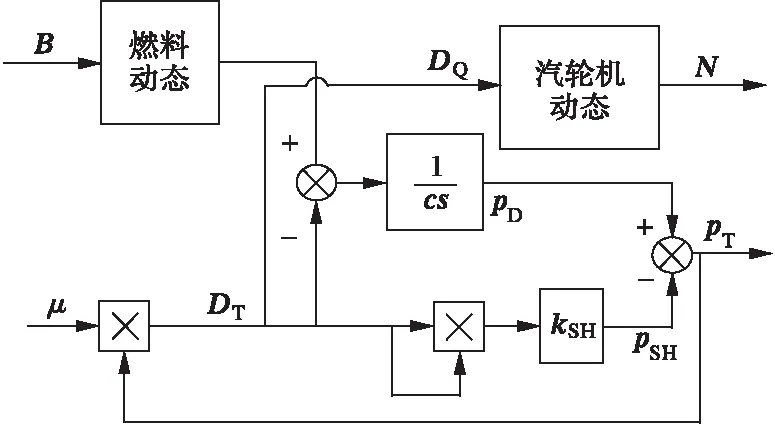
圖1 單元機組低階非線性模型
在一定的簡化前提下對圖1所示的非線性模型依據文獻[5,6]進行線性化處理,得到亞臨界單元機組協調系統的近似動態模型為
牛瘤胃積食是由于牛一次性采食大量粗飼料或精飼料,導致牛瘤胃體積迅速增加,胃壁嚴重擴張,使瘤胃正常的消化機能和運動機能紊亂的一種前胃疾病[3]。發病后,患病牛食欲停止,鼻鏡干燥,反芻停止,先是噯氣不斷,隨后逐漸停止,腰背拱起,不斷回頭顧腹,搖尾呻吟,左下腹部輕度膨大,眼結膜充血發紺。觸診瘤胃,患病牛表現出抗拒,瘤胃內容物間有如石塊,輕輕按壓,留有指痕。用手叩診瘤胃呈現濁音,呼吸急促,排便次數減少,糞便干燥,外觀呈現紫黑色,惡臭難聞。個別患病牛會繼發出現腸臌脹。發病嚴重的患病牛,機體逐漸脫水,不能正常行走,行走中左右搖擺,四肢震顫,心律不齊,全身衰竭,臥地不起,嚴重的會導致衰竭死亡。
(6)
式中:T(s)描述汽輪機的做功過程;B(s)近似代表燃料動態;G0(s)是機爐協調系統的核心模型。
模型公式(6)在100%負荷工作點(負荷330 MW;壓力17.6 MPa;燃料指令52.28%;調門開度79.60%),線性化模型可以描述為
(7)

(8)
(9)
(10)
2 多變量協調控制系統應用設計
2.1 控制器模型設計
(11)
2.2 多變量控制器組態實現
根據解耦控制器公式(11),可得多變量解耦控制器的基本原理,即在原有壓力控制器和負荷控制器的基礎上,再增加一個解耦控制器,如圖2所示。其中壓力控制器和負荷控制器為比例控制器,解耦控制器是由4個PID控制器構成。
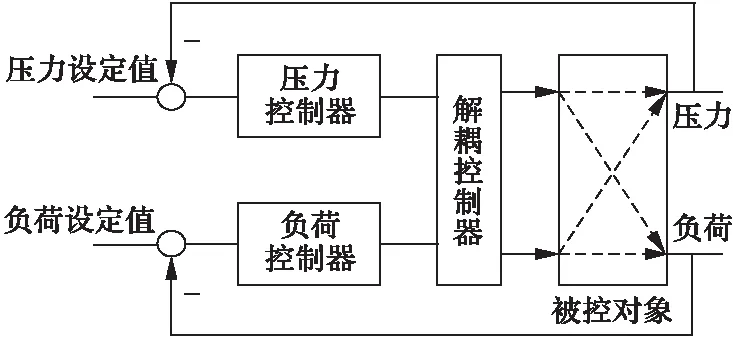
圖2 多變量解耦控制器基本原理
把圖2中壓力和負荷控制器合并到解耦控制器,得到如圖3所示的多變量解耦控制器結構。其中K11~K22為各控制分量。在此考慮以K11和K22為控制主通道,K11在需要跟蹤的時候跟蹤燃料站的輸出,而K22跟蹤汽機站的輸出,同時交叉解耦通道K12和K21跟蹤0。這樣,可以保證在控制系統從手動到自動時切換無擾。
圖4所示為達電330 MW機組多變量解耦控制器核心部分組態圖。該圖是依據圖3中的結構原理,解耦控制子回路采用INFI-90功能碼156實現的。圖4中:模塊APID-K11為壓力主控制器,APID-K12為負荷解耦控制器,APID-K21為壓力解耦控制器,APID-K22為負荷主控制器。
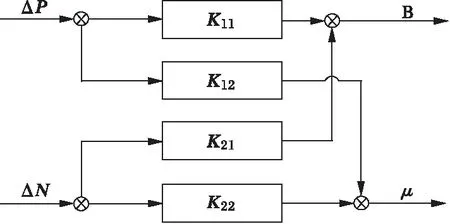
圖3 多變量解耦控制器結構簡圖
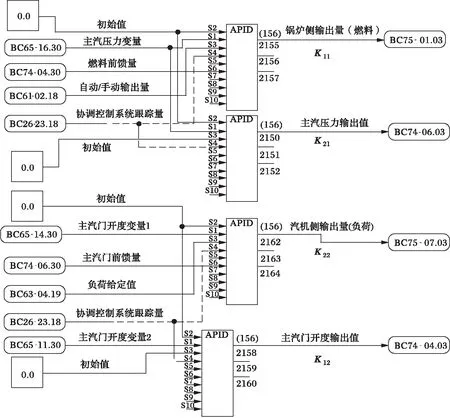
圖4 多變量解耦控制器的工程組態
3 工程應用
把上述設計的智能協調控制系統在內蒙達電亞臨界330 MW單元機組上應用。從試投運行曲線上可以看出此控制系統的優良控制品質。
圖5為機組DEB協調控制效果,其曲線1~6分別為燃料指令反饋、主汽調門指令、主汽壓力定值、主汽壓力、實際負荷、負荷指令。負荷指令變化8 MW,壓力定值變化0.1 MPa時,壓力最大偏差0.48 MPa,負荷最大偏差6 MW。
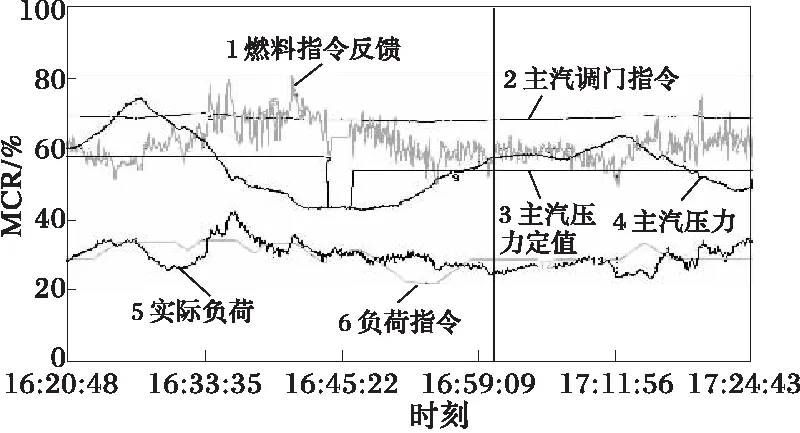
圖5 單元機組原來的DEB協調控制效果
圖6中,曲線1~6分別為實際負荷、主汽壓力、主汽壓力定值、負荷指令、燃料指令、主汽調門指令。負荷定值從320 MW減到270 MW,變負荷速率為7 MW/min,壓力定值采用滑壓運行。穩態時壓力最大偏差0.4 MPa,負荷最大偏差2.5 MW。
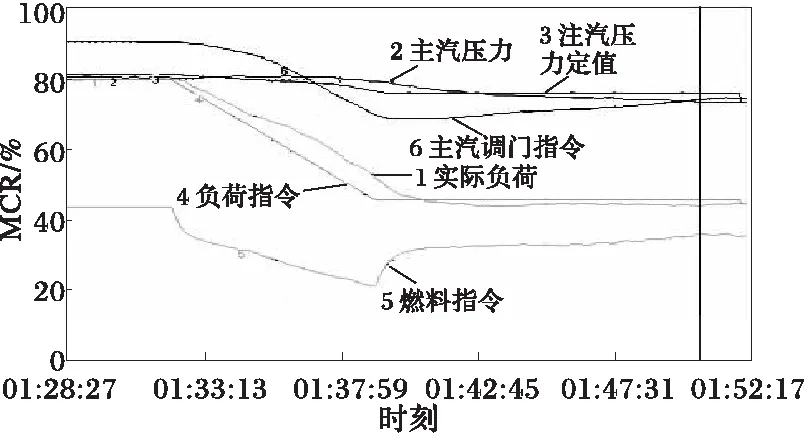
圖6 改造后智能協調控制效果
圖7中,曲線1~6分別為實際負荷、主汽壓力、主汽壓力定值、負荷指令、燃料指令、主汽調門指令。4 h內,包括吹灰過程,壓力最大偏差0.4 MPa,負荷最大偏差2.5 MW。
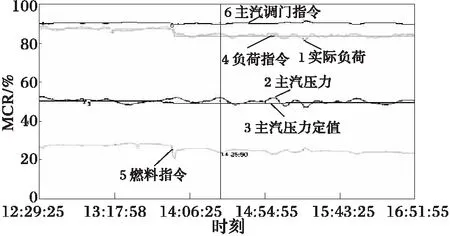
圖7 改造后一段時間內的智能協調控制效果
從以上控制效果圖可以看出機組運用新型智能控制系統改造后,其在穩態和動態控制品質上都有了明顯的改善,能夠滿足大負荷變化和高速率調節的控制要求。這是由于多變量解耦控制器大大減少了各輸入變量之間的耦合特性而產生的結果。
4 結語
通過對改造前后運行曲線的比較,可以看出通過改造加入多變量解耦控制器后的系統控制效果良好,系統的穩態性能得到了明顯改善,并可以在協調方式下進行穩定、快速的升降負荷,比手動方式升降負荷既快又穩,大大增強了機組的安全穩定性。這表明使用多變量控制器后的智能協調控制系統動態和靜態品質比之前都有很大改善,變負荷過程響應時間縮短,動靜態偏差明顯減少,自動運行效果得到改善。該多變量智能協調控制系統與原來的DEB協調控制系統的適用工況是相同的,即適用于除機組啟停外的正常運行、調峰、保護等工況,且滿足長期運行的需要,可廣泛投入工程應用中。
[1] 田亮,劉吉臻,曾德良,等(Tian Liang,Liu Jizhen,Zeng Deliang,etal).簡化的330 MW機組非線性動態模型(A simplified non-linear dynamic model of 330 MW unit)[J].中國電機工程學報(Proceedings of the CSEE), 2004, 24(8):180-184.
[2] 劉吉臻.協調控制與給水全程控制[M].北京:中國電力出版社, 1993.
[3] 房方,劉吉臻,譚文(Fang Fang,Liu Jizhen,Tan Wen). 火電單元機組協調控制系統的多變量IMC-PID設計(Multivariable IMC-PID design in the coordinated control system for fossil unit power plants)[J].動力工程(Power Engineering), 2004, 24(3):360-365.
[4] 李道林(Li Daolin).國產電站鍋爐再熱汽溫調節實用技術探討(Discussion on the practical technology for reheat steam temperature adjustment in domestic utility boilers)[J].動力工程(Power Engineering), 1999,19(1):17-22,77-78.
[5] 陳彥橋,鄭亞鋒,劉吉臻,等(Chen Yanqiao,Zheng Yafeng,Liu Jizhen,etal).基于動態解耦的模糊多模型協調控制系統應用研究(The application study for coordinated control system of fuzzy multi-model based on dynamic decoupling)[J].中國電機工程學報(Proceedings of the CSEE), 2006, 26(12):166-170.
[6] 房方,劉吉臻(Fang Fang,Liu Jizhen).單元機組協調控制系統的非線性控制研究(Nonlinear control for the coordinated system of generating unit)[J].中國電力(Electric Power), 2004, 37(7):61-65.
[7] 鄭亞鋒,陳彥橋,衛平寶,等(Zheng Yafeng,Chen Yanqiao,Wei Pingbao,etal).基于模糊多模型330 MW單元機組協調控制系統(Research on coordinated control system of 330 MW unit based on fuzzy multiple model)[J].電力系統及其自動化學報(Proceedings of the CSU-EPSA), 2006, 18(2):71-74,104.
DesignApplicationofMultivariableIntelligentCoordinatedControlSystem
ZHENG Ya-feng, CHEN Xi-jie
(State Nuclear Electric Power Planning Design & Research Institute, Beijing 100094, China)
The controlled object for the thermal power is a rather complicated multivariable nonlinear control system,which is characteristic of nonlinear,delay and great inertial.A nonlinear model of the coordinated control system for 330 MW unit plant was constructed,and it was linearized under rated work conditions.The multivariable coordinated control system of increase in multi-variable decouping controller for original coordinated control system is designed to the corresponding systems,and control result contrast of field investigation shows its validity and practicability.
decoupling control; multi-variable control; coordinated control; control model
2009-08-04
2009-10-29
TP273
A
1003-8930(2011)01-0145-04
鄭亞鋒(1980-),男,工學碩士,工程師,主要從事發電廠熱控設計。Email:zyf0556@126.com 陳西杰(1969-),男,高級工程師,主任工程師,主要從事發電廠熱控設計。Email:chenxijie@snpdri.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
西安航空學院學報(2014年5期)2014-07-13 01:27:52
