應用于皮衛星的地球磁場測量系統設計*
2011-10-19 12:47:32朱小豐金仲和
傳感技術學報 2011年8期
蔡 波,王 昊,朱小豐,韓 柯,金仲和
(浙江大學信息與電子工程學系,杭州 310027)
地球磁場通常是低軌微小衛星姿態確定系統中重要的參考依據之一。三軸磁強計體積小、重量輕、功耗低,具有較高的測量準確度,是微小衛星定姿的理想傳感器件[1]。實際應用中一般沿星體坐標系三軸方向安裝磁強計,測量空間中該位置的磁場矢量。衛星的姿態確定系統利用磁強計采集到的磁場矢量,結合地球磁場模型就可以確定衛星在地球磁場中的位置,實現衛星的姿態角度解算[2]。
由于宇宙空間的輻射環境存在著多種粒子與宇宙射線,輻射會給器件帶來損傷,普通商用磁強計無法滿足皮衛星長壽命工作的要求。針對商用磁強計的不足,在設計地球磁場測量系統可以采用兩份磁強計作冗余備份的方法,來提高地球磁場測量系統的空間抗輻照能力。
與此同時,皮衛星的運行狀態對磁強計的工作影響很大。在皮衛星由于姿態控制系統的故障出現大角度翻滾的條件下,普通商用磁強計無法保證高準確度的實時數據輸出,因此有必要對所設計的磁強計進行動態響應試驗,測試其輸出穩定性。
浙江大學微小衛星中心早期研制的地球磁場測量系統集成化程度低,功耗較大,受外界電磁干擾影響嚴重,測量誤差大。在大角度翻滾的情況下,無法保證準確、穩定的實時數據輸出,可靠性較低。
針對這些不足,本文根據皮衛星體積小、功耗低、工作環境復雜的特點,設計了一種應用于皮衛星的地球磁場測量系統。該地球磁場測量系統中自行設計的磁強計體積小(60 mm×30 mm×5 mm)、重量輕(25 g)、功耗低(150 mW)、準確度高(1σ測量誤差為10-8Tesla),可以改善普通商用磁強計的抗輻照能力,能夠在10°/s的角速度旋轉的條件下工作正常,滿足皮衛星的要求。
1 磁強計設計
本文設計的磁強計實物如圖1所示。磁強計設計框圖如圖2所示。
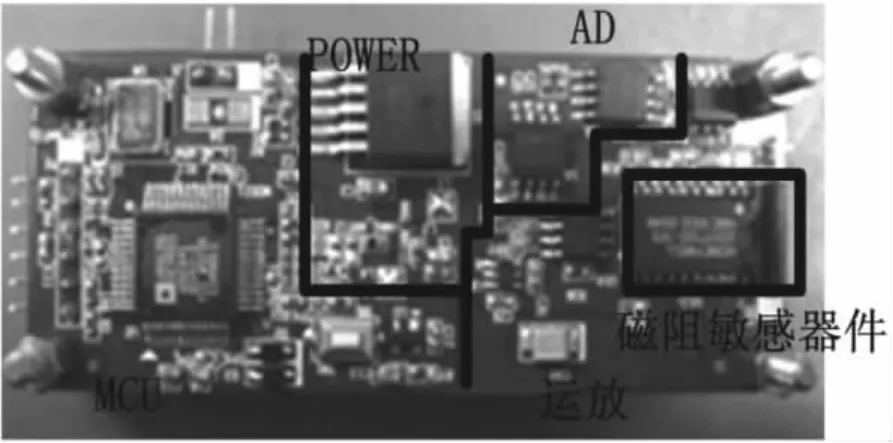
圖1 磁強計實物圖
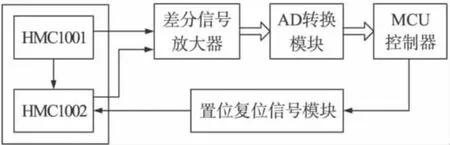
圖2 磁強計設計框圖
該結構主要由磁阻傳感器HMC1001和HMC1002、差分信號放大器、AD模數轉換器、置位/復位信號發生部分和微控制器MCU組成[3]。其中磁阻傳感器通過惠斯頓電橋將地球磁場信號轉化成差分電壓量,再通過差分信號放大器進行放大,放大后的電壓信號經過AD模數轉換后傳送至微控制器中進行濾波處理。置位/復位信號發生部分產生大電流脈沖使磁阻傳感器的磁疇方向一致,來提高磁阻傳感器的靈敏度[4]。
1.1 置位/復位脈沖電路
本文設計的磁強計通過微控制器產生置位SET和復位RESET控制信號,控制HEXFET驅動器的P和N溝道產生TSR和TRS延時,在其旁路電容中進行充放電,從而得到一電流脈沖,使得磁阻傳感器進行了置位和復位。電路產生的置位/復位信號S/R如圖3所示。
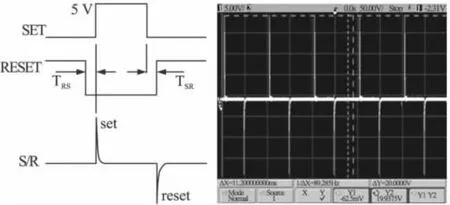
圖3 置位復位信號波形圖
經過置位或者復位以后,磁阻傳感器的輸出并不相同,從圖4中可以看出,磁阻傳感器在置位/復位以后,其斜率方向和大小均發生了改變[5]。
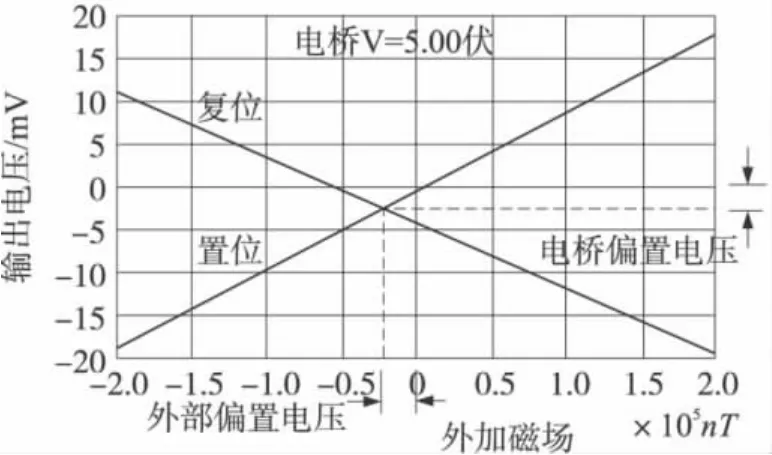
圖4 磁阻傳感器輸出特性曲線
當需要高準確度測量磁場的時候,需要結合置位/復位信號來獲取磁場信息。在每次測量磁阻傳感器的輸出時,先進行置位,讀取磁阻傳感器置位輸出電壓Vset,然后進行復位,讀取磁阻傳感器復位輸出電壓Vreset。再對兩者相加除以2來獲得如圖4所示的電橋偏置值Voffset,如式(1)所示。

然后用Vset減去Voffset來獲得磁阻傳感器的實際輸出值,這樣能夠消除因溫度漂移和電路參數漂移等共模信號造成的影響[6],從而得出一個與待測磁場成正比例的輸出。
1.2 電橋補償
當被測磁場強度為零時,惠斯頓電橋應該平衡,兩個抽頭間的電壓差為零。但是實際上由于電阻本身的容差,以及傳感器電橋參考基準電壓的誤差導致電橋不平衡。因此我們采用在磁阻傳感器的惠斯頓電橋的一個或多個臂上并聯電阻對固有失配進行補償,來實現零點的校正。
圖5中Vin+、Vin-為磁阻傳感器的正向電橋和負向電橋輸出電壓,RG為差分放大器的增益電阻,VREF為差分放大器的參考電壓,本文中采用2.5V。其輸出Vout的值如式(2)所示:

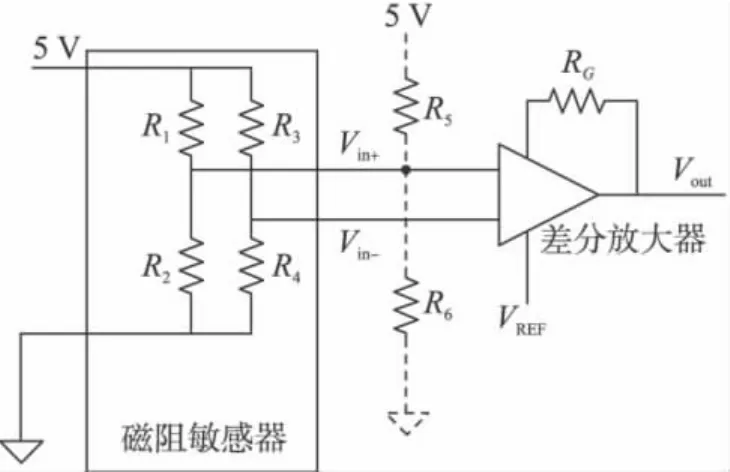
圖5 差分放大器電路
通過置位/復位使得磁阻傳感器的輸出極性相反,但是輸出端上的電橋偏置電壓大小則保持恒定。圖6中表示置位/復位時的電橋偏置電壓輸出。
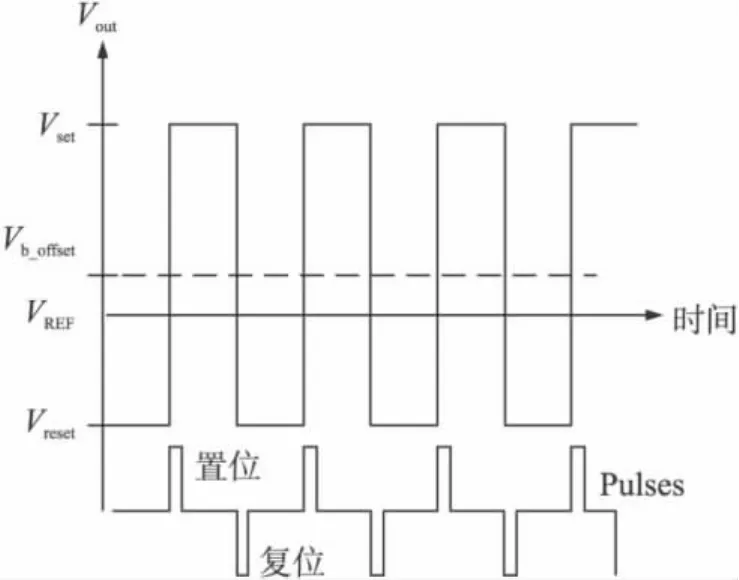
圖6 切換電橋偏置電壓輸出
置位/復位以后的磁阻傳感器輸出經過差分放大后為Vset和Vreset,通過式(3),可得經過差分放大后的電橋偏置Vb_offset為:

從式(3)看出,可以通過檢測Vset和Vreset的值來判斷惠斯頓電橋是正向或負向偏置。在表1中可以看出補償前Vset和Vreset之和為3.8 V小于兩倍的VREF(5 V),因此可以判斷磁阻傳感器存在負向電橋偏置,即當被測磁場為零時,圖中的Vin-輸出要大于Vin+輸出。于是在Vin-輸出端為R4并聯一個接地的電阻R6來減小Vin-端的輸出電壓,阻值的確定可由式(3)和惠斯頓電橋公式算得。補償后的Vset和Vreset的輸出如表1所示:
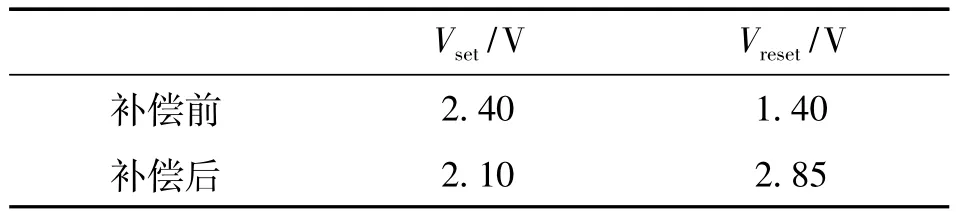
表1 補償前后的Vset/V和Vreset/V
從表1中可以看出,補償后的Vset和Vreset之和接近5 V,由此反推出校準后磁阻傳感器的電橋偏置接近于零。
1.3 采樣信號處理
磁阻傳感器檢測的地球磁場信號十分微弱,很容易受到外界工作環境的干擾。尤其是在地面進行測試工作時,受到50 Hz左右的工頻以及其倍頻的干擾,使得檢測準確度大大降低,甚至影響其正常工作[7]。從圖7中可以看出磁阻傳感器的輸出疊加了50 Hz左右的工頻干擾信號。
因此在本設計中選用的AD模數轉換器為Cirrus Logic公司生產的20 bit串行模/數轉換器CS5513,其內部包括一個4階Δ-Σ調制器和一個數字梳狀濾波器。CS5513內部的梳狀濾波器在47 Hz~63 Hz的頻率范圍內,存在-80 dB以下的衰減,同時在100 Hz時也有比較明顯的衰減[8]。通過梳狀濾波器的這種頻率響應特性,對50 Hz工頻以及其倍頻起到了很好的衰減作用,極大程度上抑制了它帶來的干擾。在某一固定軸存在強工頻電磁干擾的情況下,采用普通AD轉換器和本文采用CS5513的磁強計的輸出結果如圖8、圖9所示。
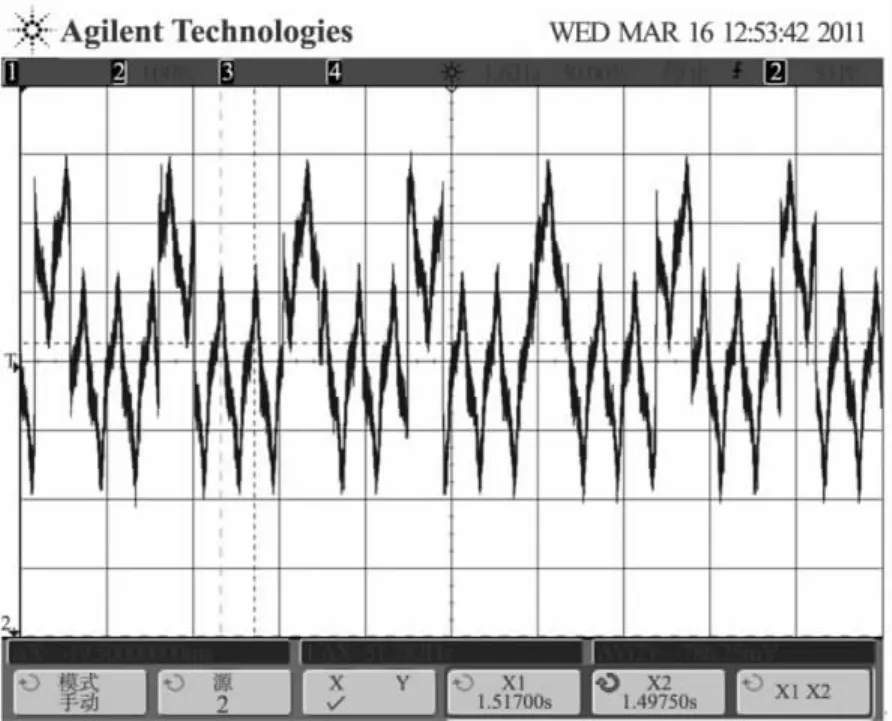
圖7 工頻干擾后的輸出
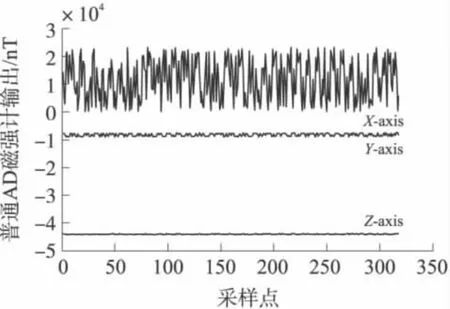
圖8 采用普通AD的磁強計的輸出
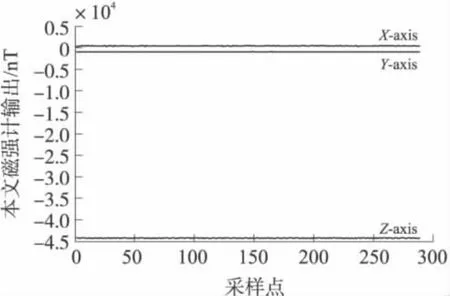
圖9 本文的磁強計的輸出
從上圖可以看出采用普通AD轉換器的磁強計的輸出受到很大的工頻干擾,波動較大。而采用CS5513的本文磁強計能夠有效的濾去干擾,輸出十分穩定。
經過AD采樣后的數據在單片機中進行均值處理,其功能相當于一個低通濾波器,濾去奇異點,減少由于置位/復位的開關動作和環境磁場干擾產生的噪聲,從而降低系統噪聲。
1.4 磁強計輸出標定
為了能夠測量地球磁場的真實值,我們對本文磁強計的輸出值進行歸一化標定[9]。標定過程中以HONEYWELL公司的HMR2300作為參照,該磁強計的輸出結果能夠真實反映所測磁場大小。
本文中磁強計的輸出大小取決于前端模擬放大部分的設定倍數。可以通過改變運算放大器的外接電阻RG來調整放大倍數,即調整磁強計的標度因數。
實驗中將HMR2300和本文的磁強計分別水平置于轉臺上,通過實時采樣數據找出輸出值的最大值和最小值,計算它們之間的差值。假定HMR2300的標度因數為1,由式(4)計算磁強計的標度因數α。

式中Hmax、Hmin為本文設計的磁強計的最大值和最小值,H'max、H'min為HMR2300的最大值和最小值。
根據磁強計的標度因數,計算替換所需的電阻值。調整后重新測試,檢查標度因數是否在0.95~1.05之間,如不滿足要求,則需要再次進行標定。測得HMR2300和磁強計的極值如表2所示。
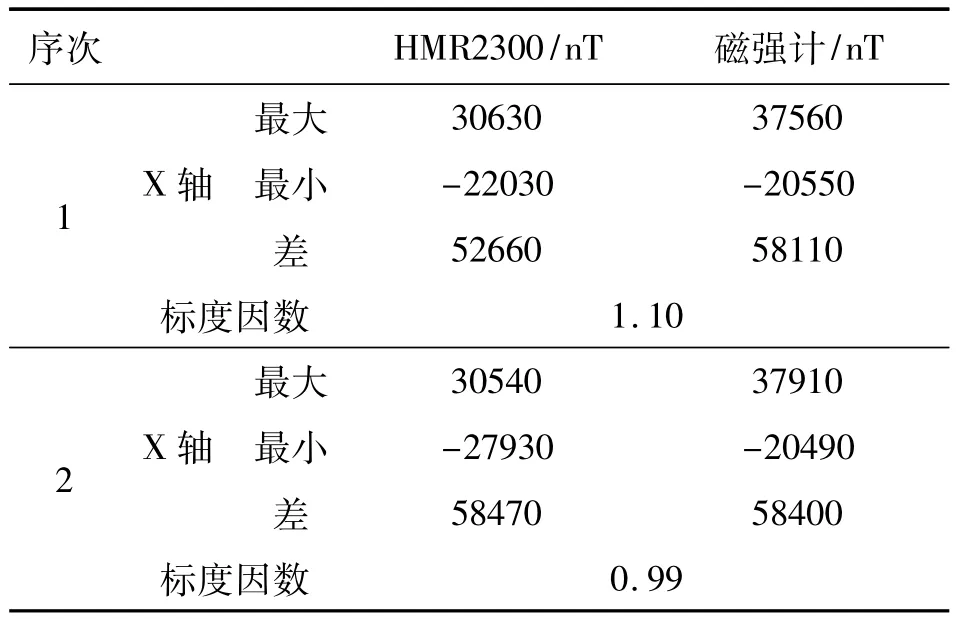
表2 磁強計的標度因數
可以發現,補償過后磁強計的標度因數在0.99左右,也即磁強計的測量值應為實際待測磁場的真實大小。
2 磁強計測試及結果分析
2.1 磁強計標度因數測試
為了驗證上文提及的磁強計輸出標定方法的有效性,我們在北京某零磁場實驗室進行了磁強計的標度因數實驗。實驗過程中把磁強計固定在零磁環境下的轉臺上,使Z軸指向垂直方向,操作零磁場環境,設置系統位置的磁場強度,并通過采樣軟件采集數據。X軸和Y軸的測量過程與Z軸相似。
本文設計的磁強計的X軸輸出與環境磁場的線性關系如圖10所示,其它軸情況與之相似。
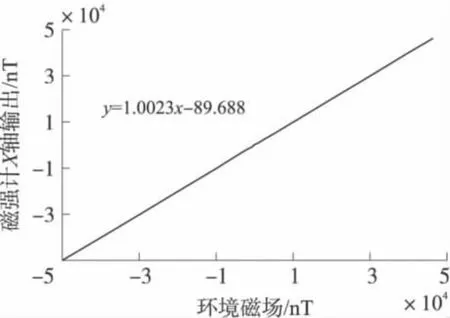
圖10 零磁環境下磁強計X軸輸出
實驗中測得本文磁強計與環境磁場的輸入輸出關系如表3所示。
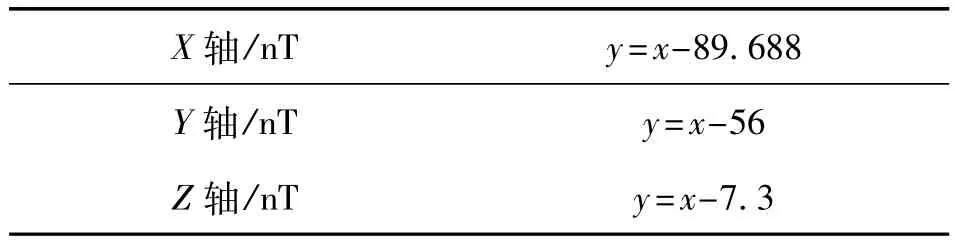
表3 磁強計與環境磁場的關系
表中x為標準環境磁場,y為磁強計輸出。
由上表可以看出本文磁強計的各軸輸出與標準環境磁場有很好的線性關系,從而驗證該標定方法的有效性。
2.2 磁強計輸出誤差測試
為了測試磁強計的準確度,我們在室內普通環境中進行了地面測試。測試環境中存在諸多干擾因素,比如穩壓源、星上通信器件以及其它用電設備的電磁干擾。實驗中將磁強計水平放置于測試平臺上,盡可能關閉其它用電設備,將環境干擾降到最小[10-11]。
磁強計的X軸測量誤差如圖11所示,其它軸與X軸相似。
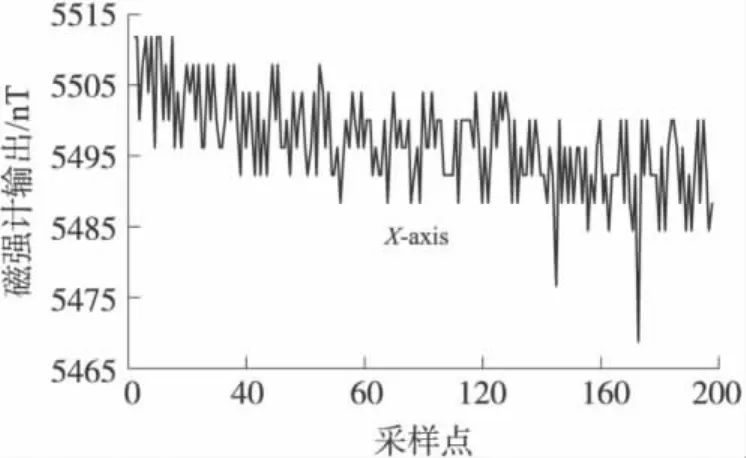
圖11 磁強計X軸輸出
磁強計的測量誤差如表4所示。
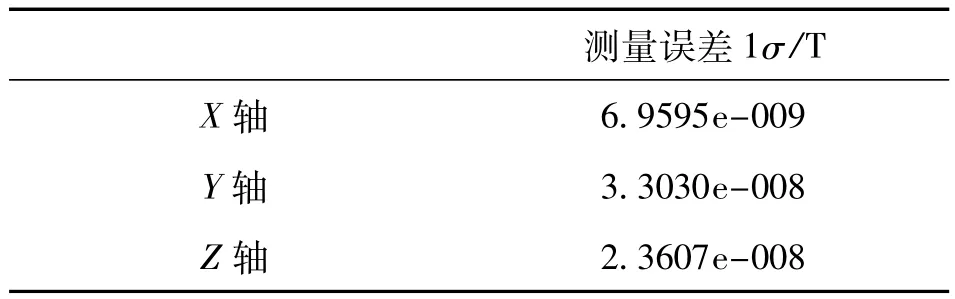
表4 磁強計的測量誤差(1σ)
從表中可以看出磁強計在室內電磁干擾的條件下,仍能夠保持高準確度,三軸測量誤差接近10-8Tesla。
2.3 磁強計動態響應測試
皮衛星在太空運行期間可能因為異常情況出現大角度翻滾,因此有必要在一定角速度旋轉的情況下,測量磁強計的動態響應特性。實驗過程中將磁強計放置于轉臺上,設定轉臺的角速度,記錄一段時間的采樣數據。
轉臺的角速度為10°/s時磁強計的測試結果如圖12所示。
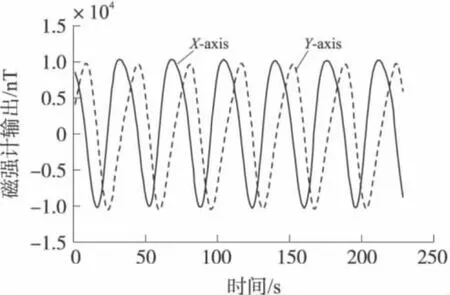
圖12 磁強計動態響應曲線
由上圖可見磁強計在旋轉過程中X、Y軸的磁場測量值呈三角函數變化,Z軸測試結果與X、Y軸相似,與理論相吻合[12-13]。可以看出磁強計在角速度10°/s時可以正常完成磁場的測量任務。
3 結論
本文設計的地球磁場測量系統滿足了皮衛星的各方面要求,該測量系統中所設計的磁強計體積小、重量輕、功耗低、接口簡單、測量準確度高,能夠有效的抗空間復雜環境的干擾,滿足皮衛星的要求。在2010年9月成功發射的浙江大學ZDPS-1A皮衛星中,該地球磁場測量系統工作正常。
[1]薛亮,李天志,李曉瑩,等.基于MEMS傳感器的微型姿態確定系統研究[J].傳感技術學報,2008,21(3):457-460.
[2]Han Ke,Wang Hao,Jin Zhong-he.Magnetometer-Only Linear Attitude Estimation for Bias Momentupico-Satellite[J].Journal of Zhejiang University-Science A(Applied Physics& Engineering),2010,11(6):455-464.
[3]賀光紅,韓柯,王昊,等.面向皮衛星的地球磁場測量系統設計[J].電子技術應用,2009,12(6):77-80.
[4]王澤民,胡波,鄒鵬毅,等.玻莫合金磁阻傳感器的應用探討[J].聲學與電子工程,2005,3(6):47-49.
[5]Honeywell 1-and 2-Axis Magnetic Sensors Datasheet[R].
[6]Caruso M J.Set/Reset Pulse Circuits for Magnetic Sensors[R].Honeywell Application Note.
[7]陳棣湘,潘孟春,羅飛路.三維磁敏傳感器的設計及誤差分析[J].傳感技術學報,2006,19(6):642-644.
[8]Crystal CS5510/11/12/13,16 and 20-Bit,8-Pin Δ - Σ ADC Datasheet[R].
[9]朱興樂,肖昌漢,閆輝.基于單軸定標的三軸磁傳感器的誤差校正[J].海洋測繪,2010,30(6):26-29.
[10]吳德會,黃松嶺,趙偉.基于FLANN的三軸磁強計誤差校正研究[J].儀器儀表學報,2009,30(3):449-452.
[11]徐濤,溫東,孫曉磊.基于加速度計和磁強計的方位測量與校正技術研究[J].儀器儀表報,2009,30(10):2018-2022.
[12]林春生,向前,龔沈光.三軸磁強計正交誤差分析與校正[J].探測與控制學報,2005,6(2):8-12.
[13]西永在,王傳雷,劉江平,等.地面三分量磁測的觀測誤差分析[J].工程地球物理學報,2009,6(6):703-707.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21