基于視覺的電子激光經緯儀空間點自動瞄準方法*
2011-10-19 12:47:30邾繼貴葉聲華
傳感技術學報 2011年8期
關鍵詞:測量
周 虎,邾繼貴,葉聲華
(天津大學精密測試技術及儀器國家重點實驗室,天津 300072)
隨著國民經濟的快速發展和國家裝備制造業水平的不斷進步,作為空間大尺寸坐標測量設備,經緯儀系統以其非接觸測量、轉站方便、測量精度高等優點得到了日益廣泛的使用。但傳統的電子經緯儀系統依然存在諸如目標需要人為瞄準、工作強度大、效率低等不足,不利于工業現場的大批量作業[1-2]。近年來,各廠商相繼開發出帶有雙軸馬達驅動的激光經緯儀、電視經緯儀等新型經緯儀系統,以實現在一定條件下簡化測量流程、提高系統測量效率的目的[3-5]。但由于馬達運動誤差的存在,使得以上系統在自動測量過程中經緯儀激光點很難精確瞄準被測目標,降低了測量精度;同時,受電視視場角的限制,在大空間范圍內搜索目標存在一定的困難。若將圖像處理和計算機視覺技術引入到經緯儀測量過程,利用外置可變焦攝像機構代替電視經緯儀對大范圍空間目標點掃描成像,并對包含激光點的目標圖像進行插值計算,可以在相同條件下獲得更為精確的瞄準角度值,有助于提高系統測量速度,實現測量過程的自動化。
1 系統結構
激光經緯儀自動坐標測量系統由兩臺以上TM5100A電子激光經緯儀、外置攝像機構以及工作PC組成,如圖1所示。TM5100A經緯儀是Leica公司推出的新一代電子經緯儀測量設備,采用了動態測角技術[6],水平測角和垂直測角合成標準不確定度可同時達到0.5″。與TM1800相比,該經緯儀增加了水平軸、俯仰軸驅動馬達與可選的DL2激光器等機構。DL2激光器安裝在經緯儀目鏡端,其激光束出射方向與經緯儀視準軸共線,投射到物體表面的光斑中心即指示了經緯儀實際瞄準位置。
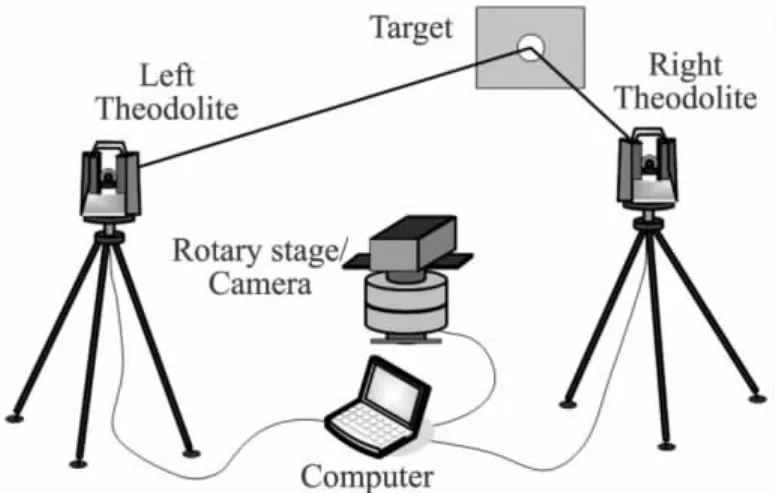
圖1 測量系統結構示意圖
外置攝像機構由二維旋轉云臺和固定于云臺上的CCD攝像機/三可變鏡頭部分構成。云臺可在工作空間內自由平移,使攝像機能夠以接近正視的姿態瞄準被測目標。鏡頭處于廣角模式時,云臺帶動攝像機沿水平/俯仰兩個方向旋轉,以實現大空間范圍內的目標點掃描。當被測目標在視場中心成像后,利用極線法[7-8]等方法驅動經緯儀,可將激光點迅速移入攝像機視場。此時將鏡頭置于長焦模式,即可實現對目標點自動瞄準測量。重置鏡頭于廣角模式,開始新的掃描,不斷重復這一過程,直至完成全部測量任務。
2 插值瞄準方法
2.1 圖像細分定位
圖像定位精度是影響最終瞄準精度的因素之一。攝像機視場內目標點質心和激光光斑中心定位精度由CCD像素分辨率和測量分辨率共同決定。測量分辨率公式[9]:
式中Δu、Δv分別為CCD水平和垂直方向像素尺寸,k為攝像系統光學放大倍數。經緯儀瞄準目標點過程中,將鏡頭置于長焦模式可以顯著提高鏡頭光學放大倍數,從而大幅度提高系統測量分辨率。
在光學細分的基礎上對包含被測目標的局部原始圖像利用自適應閾值分割[10],通過Sobel算子獲得像素級別的邊緣后,利用梯度法[11]將邊緣定位至亞像素級別。對最終得到邊緣點最小二乘擬合,可以獲得較高的目標定位精度;激光光斑中心則采用加權質心法直接提取。
2.2 掃描線模型
設電子激光經緯儀以固定垂直角θ做小角度水平旋轉,激光點投射到某一局部平面M對應的軌跡線為AB。以經緯儀處于初始掃描位置時視準軸在水平面的投影作為Z軸,Y軸豎直向下建立經緯儀坐標系OwXwYwZw,X軸由右手法則定義。OcXcYcZc為攝像機坐標系,N為理想像平面,令攝像系統光心在OwXwYwZw下的坐標為O0(x0,y0,z0)。由相機針孔模型[12]可知,面OcAB與N的交線CD即為攝像機觀測到的激光點掃描軌跡線。小范圍內用切平面代替經緯儀掃過的圓錐面,則可將AB近似于一條直線,如圖2所示。
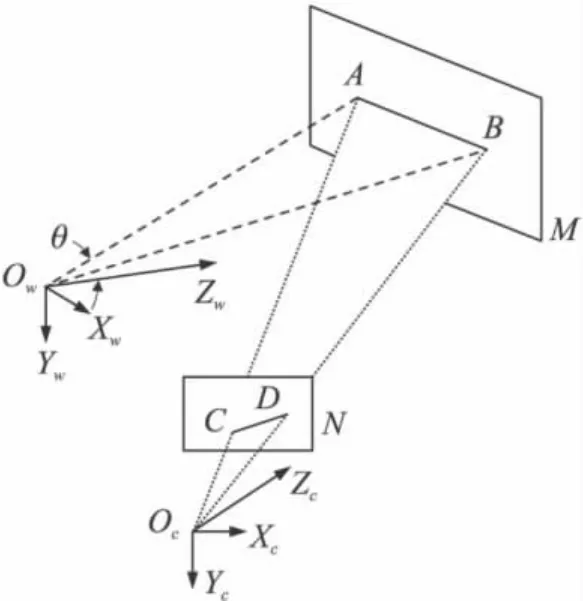
圖2 經緯儀掃描線模型
設經緯儀坐標系OwXwYwZw中局部平面M方程為:

則直線AB方程可以表示為:

二維云臺不存在繞光軸的旋轉運動,可視像平面X軸方向始終保持水平狀態,即 α=0。根據Kardan旋轉公式,OwXwYwZw到像平面坐標系的旋轉矩陣為:
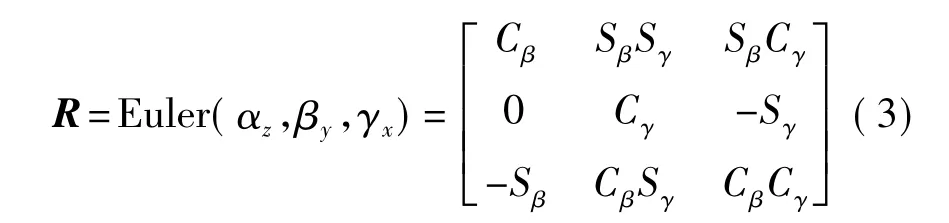
式中,α、β、γ分別為攝像機光軸沿坐標系OwXwYwZw的Z軸、Y軸、X軸的旋轉角。直線AB上任意一點PM(xM,yM,zM)在像平面物理坐標系下的投影坐標PN(xN,yN)滿足:
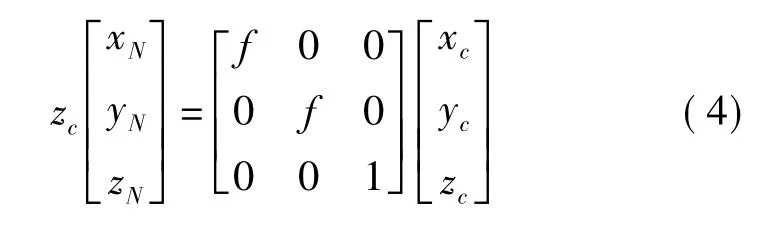
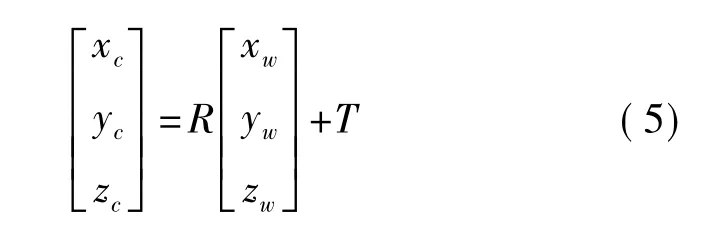
式中,[xcyczc]T為PM在OcXcYcZc下的坐標值。T為坐標系OwXwYwZw到OcXcYcZc的平移向量。攝像系統處于任一確定位置時,變量A1、B1、C1、D1、β、γ、f、O0均為定值。由式(1)~式(5),可求得像平面物理坐標系下直線CD的斜率:

其中K、φ1、φ2為由A1等定值計算得到的常數。設經緯儀以不同的垂直角θ和θ+Δθ掃過平面M,則兩次水平掃描線的斜率偏差:
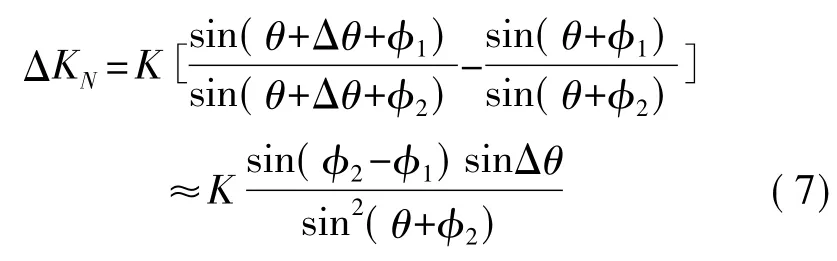
若局部平面與面OwXwYw間的二面角較小,且當 Δθ<0.01°時,ΔKN近似于 0。即當垂直角變化很小時,兩條水平掃描軌跡線近似平行。同理,當水平角變化很小時,兩條垂直掃描線也近似平行,可視為不同方向平行線組成的平行網格。
2.3 離散點插值
由以上分析可知,經緯儀小范圍內單軸運動會引起圖像中激光點質心同時沿像平面X軸、Y軸方向近似線性變化。即對應于任一個像素點,以下關系式成立:
其中,(uN,vN)表示像平面像素坐標系下經緯儀激光光斑質心坐標,x、y為相應的經緯儀水平角和垂直角。微動經緯儀,獲得三組以上對應的(uN,vN)、(x,y)值作為控制點,即可利用最小二乘法求解6個系數a1、b1、c1、a2、b2、c2。
將上式改寫為矩陣形式:
可得:
若用目標點質心坐標(uD,vD)替換式(10)中經緯儀激光光斑質心坐標(uN,vN),即可計算經緯儀精確瞄準該目標時對應的角度值。
3 實驗
3.1 掃描線實驗
距TM5100A經緯儀約5 m處放置一黑色平面,該平面與面OwXwYw、以及與攝像機像平面間的二面角均約為15°。驅動經緯儀以不同垂直角水平掃描該平面,掃描線對應的圓心角為0.6°,初始垂直角為75°,相鄰掃描線間的垂直角增量為 Δθ=0.03°。表1為對9條激光點水平掃描線像素坐標采用等偏差最小二乘擬合求斜率的結果;表2為對9條激光點垂直掃描線像素坐標求斜率的結果,與表1類似,掃描線對應的圓心角為0.6°,相鄰掃描線間的水平角增量為Δθ=0.03°。由表可知,經緯儀激光點以小增量同方向掃過平面時,掃描線近似平行。
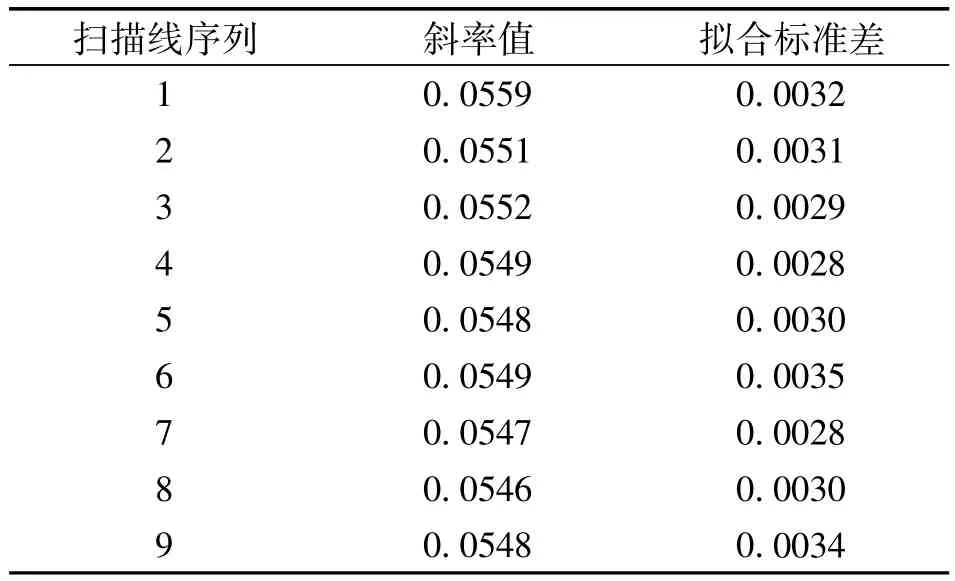
表1 水平掃描線斜率
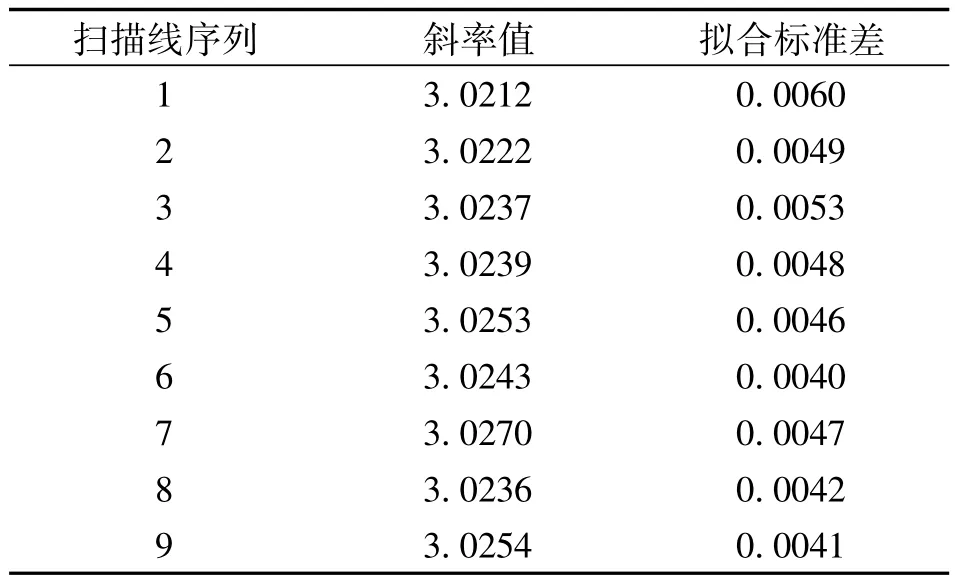
表2 垂直掃描線斜率
3.2 自動瞄準測量實驗
利用中國計量院二基地標準長度基準進行測量精度驗證,如圖3所示,正六邊形的六個頂點以及正六邊形中心位置為基準墩位。墩位中心為沿垂直方向分布的標準螺柱,螺柱軸線間距離為經過測定的標準值。圖4所示靶標通過標準轉接件與螺柱配合,靶標質心過螺柱軸線。在T1、T2位置架設兩臺經緯儀,并將云臺置于距靶標較近位置。攝像機掃描發現靶標后,即可將經緯儀激光點引入相機視場,由系統自動完成靶標質心的三維坐標測量。實際測得的靶標質心間水平距離與標準長度對比結果如表3所示。其中經緯儀基線距b=11 421.274 mm,高差h=57.695 mm,經緯儀距靶標的水平距離在15 m~25 m之間。由于測量GAW4、GAW1位置靶標時經緯儀觀測角較大,故實際只采用了GA01、GAW2、GAW3、GAW5、GAW6間六組距離值數據進行對比。
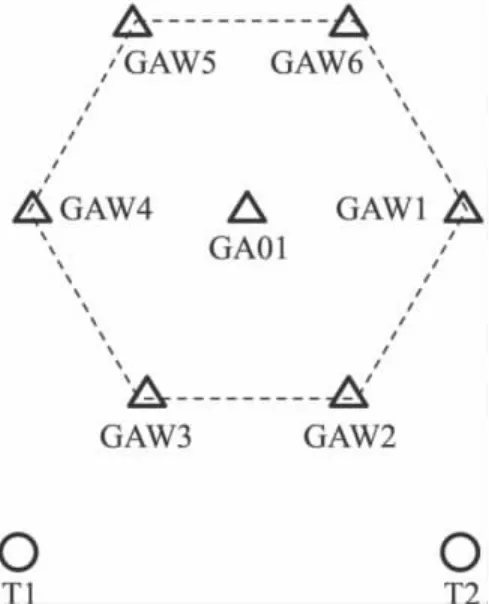
圖3 現場基準布置

圖4 轉接件與靶標
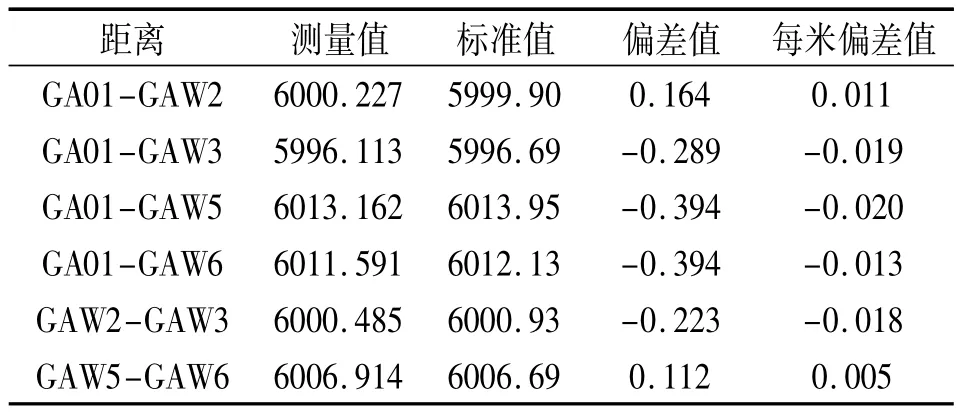
表3 測量結果與標準值對比 mm
由表3可知,與標準長度對比,幾組數據的實際測量偏差均不超過±0.02 mm/m。
4 結論
實驗數據表明,電子激光經緯儀自動瞄準目標過程中利用外置攝像系統在長焦模式下實現光學放大以提高目標定位精度,當經緯儀概略瞄準目標點后,再引入相關插值方法計算經緯儀實際瞄準位置,能夠有效提高測量效率并保證系統精度。
以上插值過程均假設存在某一局部平面。如何將插值算法應用于非平面目標,實現快速有效的瞄準測量,是下一步要進行的工作。
[1]張滋黎,邾繼貴,耿娜,等.雙經緯儀三維坐標測量系統設計[J].傳感技術學報,2010,23(5):660-664.
[2]馬驪群,王立鼎,靳書元,等.工業大尺寸測量儀器的溯源現狀及發展趨勢[J].計測技術,2006,26(6):1-5.
[3]李清安,王廈,孫志遠,等.基于電子經緯儀的雙目CCD測量系統的標定研究[J].儀器儀表學報,2006,27(6):188-190.
[4]徐晶,楊華民,方明,等.CCD激光經緯儀自動跟蹤算法及軟件實現方案[J].兵工學報,2008,29(6):662-666.
[5]李廣云.工業測量最新進展及應用[J].測繪工程,2001,10(2):36-40.
[6]尚超,王淦泉,陳桂林,等.基于經緯儀的感應同步器測角精度檢測方法研究[J].傳感技術學報,2008,21(5):865-868.
[7]Zhang Zili,Zhu Jigui,Ye Shenghua,et al.The Guidance Methodology of a New Automatic Guided Laser Theodolite System[C]//Proceedings of SPIE—The International Society for Optical Engineering,Beijing,China:SPIE,2008:71600R1-71600R8.
[8]Kalnen H,Reiterer A.Videotheodolite Measurement Systems-State of the Art[C]//ISPRS Commission V Symposium,Dresden,Germany:CRC PRESS,2006:142-146.
[9]李洪海,王敬東.攝像機標定技術研究[J].光學儀器,2007,29(4):7-12.
[10]王亮亮,王黎,高曉蓉,等.兩種改進的局部閾值分割算法[J].現代電子技術,2009,32(14):78-80.
[11]劉立程.改進的基于形態學梯度法的車輛圖像邊緣檢測方法[J].廣東工業大學學報,2007,24(2):84-86.
[12]夏仁波,劉偉軍,趙吉賓,等.基于圓形標志點的全自動相機標定方法[J].儀器儀表學報,2009,30(2):368-373.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00