MEMS面內大量程加速度傳感器設計與分析*
2011-10-19 12:47:02石云波
傳感技術學報 2011年8期
趙 銳,石云波,唐 軍,劉 俊
(儀器科學與動態測試教育部重點實驗室,中北大學,太原 030051)
硅微機械加速度計因其具有尺寸小、重量輕、高性能、批量生產成本低等優點,現已在航空航天等領域得到了廣泛的應用[1-3]。武器系統作為其中一種較為特殊的應用,其引信戰斗部在撞擊目標時會產生高達幾十萬gn的加速度值,這就要求加速度計不僅要有高靈敏度、大帶寬,還應具有高諧振頻率、抗高過載等特點,從而能夠實現對加速度較為快速精確的測量[4-5]。其中壓阻式加速度傳感器是最早量產的加速度傳感器,且其加工工藝成熟、可行性高,測試相對簡單,因而得到了廣泛的應用[6-8]。
目前較為成熟的壓阻式微加速度傳感器是以硅材料為基礎的離面振動的梁-質量塊結構。但是該結構通常僅有一個敏感元件,因此在進行多維加速度測量時,容易引起維間交叉耦合,從而造成測量誤差。美國California大學Eklund等提出了一種單質量塊加速度計,可實現對1gn~500gn范圍內面內加速度的測量[9]。中科院上海微系統與信息技術研究所的李昕欣教授等提出一種微小梁結構的、可以實現對面內加速度測量的加速度計,其測量范圍可達到0.25gn~25 000gn[10]。合肥工業大學許高斌等提出了一種基于SOI的高g值MEMS加速度計,可以實現對量程高達25萬gn加速度的測量[11]。到目前為止,現有的面內加速度計大多測量g值較低,不能滿足侵徹等高g值、高過載環境下的需求;基于SOI技術的加速度計雖然可以解決測量g值較低的問題,但造價較高,難以進行大規模、批量化生產。
本文所述傳感器就是在這種應用背景前提下,設計了一種測量平面內加速度的大量程壓阻式加速度傳感器。該加速度計結構合理、簡單,能實現水平向加速度測量,加工工藝簡單,易于實現三軸集成,適用于測量高g值的沖擊加速度。ANSYS軟件模擬分析表明,設計的加速度計具有較高的靈敏度與諧振頻率,且具有較高的抗過載能力,可滿足150 000gn加速度的測試需求。
1 結構設計與分析
本文提出的面內大量程加速度傳感器采用玻璃-硅-玻璃鍵合的三層結構。其中加速度計檢測部分制作在中間硅層上,上下兩層玻璃襯底起到保護中間結構層的作用。
加速度計檢測單元結構如圖1(a)所示,其結構雙端固支結構,由外框、懸臂梁、質量塊組成,懸臂梁與質量塊等厚。通過硼離子制作工藝,在懸臂梁根部制作有檢測用壓敏電阻,用來檢測應力變化;在框架上制作了同樣形狀、同樣大小的參考壓敏電阻;在質量塊和懸臂梁表面制作有檢測反饋導線,和檢測壓敏電阻、參考壓敏電阻一起構成惠斯通電橋。
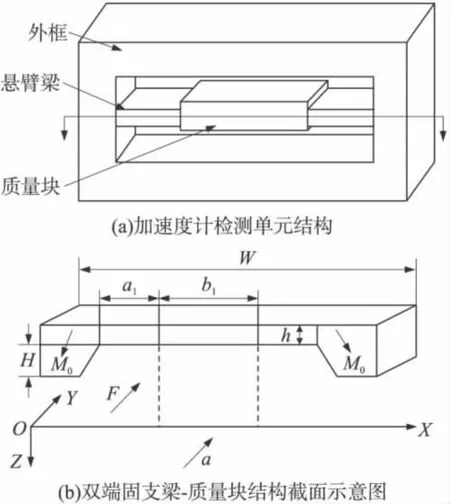
圖1 加速度計結構示意圖
當加速度計經受面內敏感方向上的加速度時,質量塊會帶動懸臂梁產生彎曲,懸臂梁上應力分布發生變化,使得兩個檢測壓敏電阻一個阻值變大,一個阻值變小,外部加速度的大小就可以通過惠斯通電橋的輸出電壓反映出來。在檢測單元中,懸臂梁的厚度比其寬度要大的多,在保證了懸臂梁剛度的同時,可有效減小非敏感方向加速度引起的誤差。各結構參數定義如表1所示。
表1 結構參數定義
1.1 簡化模型分析
如圖1(b)雙端固支梁-質量塊結構截面圖所示,由于該結構為左右對稱結構,計算時考慮左半部分即可,可得到結構左懸臂梁的彎矩方程為[12]:

上式中M0是梁邊緣的約束彎矩,兩端固支面的支持力都是F。當結構受加速度a的作用時,結合傳感器模型結構梁的撓曲線微分方程以及力平衡原理,通過計算可得到梁截面上的最大彎曲正應力,進而得到梁上的最大應力值為(x=0時):

另外,可由結構撓度方程[14]可知結構形變最大的位置在懸臂梁與質量塊連接處,且最大值為:

1.2 固有頻率分析
為便于進行固有頻率計算,將結構簡化為圖1(b)所示模型。設y0為結構中間點的撓度,y為距固定端x點上的撓度。采用Rayleigh法,結構在振動時最低自振頻率為:
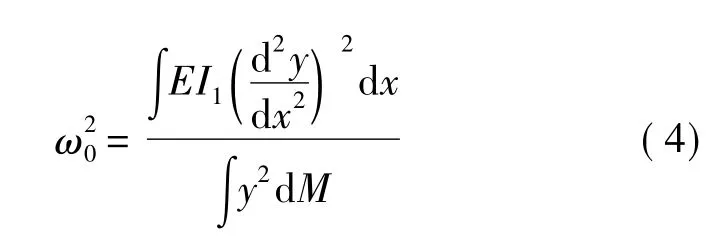
因此結合撓曲的形狀,可計算自振頻率。假設撓曲的形狀為正弦曲線,則有:

則由式(4)可以解得結構固有頻率為:
2 模擬仿真分析
2.1 Matlab 仿真分析
在傳感器實際加工,只有梁的長度不受工藝限制,但梁長不宜過長,否則也會使梁上應力增大。另外,考慮器件對結構最大應力和固有頻率的要求,可得到梁厚度和長度的選擇范圍。利用Matlab分析梁厚度、長度與結構最大應力和固有頻率的關系,從中可以看出結構參數對結構應力和頻率的影響成反比關系。
如圖2(a)和2(b)所示,可知:梁長度增加,梁上最大應力隨之增大,固有頻率隨之降低,結構靈敏度隨之增大;梁厚度增加,梁上最大應力隨之減小,固有頻率隨之增大,結構靈敏度隨之減小。
圖2 Matlab仿真分析圖
2.2 有限元模擬仿真
為了研究分析加速度傳感器在敏感方向加速度作用下結構的可靠性,利用ANSYS有限元分析軟件對傳感器結構進行了靜力學分析和模態分析。通過采用相關理論,結合Matlab仿真和工藝加工需求,得到傳感器結構主要尺寸參數范圍,如表2所示。

表2 傳感器結構主要尺寸參數范圍 單位:μm
圖3是利用ANSYS分析的150 000gn載荷下傳感器結構應力分布曲線。其中,SX為結構在該路徑上所受X向應力,SY為所受Y向應力。從圖中可以看出從外框邊緣至梁根部,拉應力起作用并逐漸增大,至梁根部拉應力達到最大值,此后開始減小至零,且結構在1.5×106gn載荷下所受到的最大應力約為232 MPa,遠小于硅的極限強度,整條路徑上的應力變化趨勢關于質量塊中心對稱。
圖3 傳感器150 000 gn載荷下結構應力分布曲線
圖4給出了加速度傳感器前四階模態振型,各階模態振型對應的固有頻率如表3所示。由圖4、表3可知,加速度計1階模態為其檢測模態,沿敏感方向做往復運動,同時,加速度計的2階、3階、4階模態遠大于加速度計的一階檢測模態,避免檢測時發生交叉耦合(即橫向靈敏度過大),有利于減小加速度傳感器的測試誤差,提高了傳感器的敏感軸方向上輸出的精度,滿足大量程加速度傳感器的應用要求。
圖4 加速度傳感器前四階模態振型

表3 前四階模態分析頻率表 kHz
通過Matlab及Ansys進行仿真分析,其仿真結果與式(3)及式(6)理論計算結果相吻合。通過對傳感器結構參數進行了優化設計,得到了傳感器結構主要尺寸參數范圍,如表2所示。通過有限元仿真分析可知:懸臂梁剛度的大小對結構的抗高過載特性和結構的靈敏度起著至關重要的作用,因此為有效降低非敏感方向對敏感方向的影響,應保證懸臂梁在敏感方向上的剛度遠小于其在非敏感方向上的剛度,進一步驗證了本結構的合理性。
3 靈敏度分析
當傳感器受到外部敏感方向加速度時,傳感器質量塊將沿敏感方向運動,如圖5(a)所示,將一個壓敏電阻放置在懸臂梁上的拉應力區域,設該電阻阻值增大ΔR;將另一個壓敏電阻放置在與之成對稱結構的壓應力區域內,設該電阻阻值減小ΔR。設加速度計結構中檢測壓敏電阻和參考壓敏電阻的初始電阻阻值均為R,如圖5(b)所示,則加速度計靈敏度可近似表示為:

上式中,π44為P型硅的壓阻系數,由硼離子的摻雜濃度和加速度計使用溫度決定,結合工藝條件,取為110×10-11Pa;σ為懸臂梁軸向應力:a為外界加速度;Vin為電橋輸入電壓,根據實際使用情況,取Vin=3.3 V。由應力仿真可取a=150 000gn,σ=2.319 67×108Pa,將所選參數代入式(7)中計算可得該傳感器的靈敏度為1.41 μV/gn。
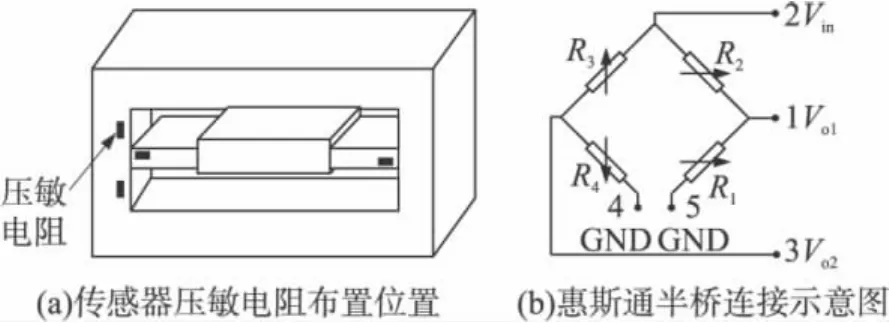
圖5 傳感器惠斯通電橋設計圖
4 結論
本文設計分析了一種基于MEMS技術的壓阻式面內大量程加速度計,該傳感器易于實現三軸集成,具有良好的靈敏度和抗高過載能力,可以滿足爆炸、沖擊以及彈體侵徹等高g值環境下測試需求。
[1]Shi Yunbo,Liu Jun,Qi Xiaojin,et al.Fabrication and Measurement of High-gMEMS Accelerometer[J].Chinese Journal of Scientifie Instrument,2008,29(7):1345-1349.
[2]董培濤,周偉,李昕欣,等.三梁-質量塊敏感結構高性能壓阻式碰撞加速度計[J].傳感技術學報,2007,20(8):1752-1756.
[3]陳尚,薛晨陽,張文棟,等.基于介觀壓阻效應的高gn值加速度計設計[J].傳感技術學報,2008,21(3):446-449.
[4]Eklund E J,Shkel A M.Single-Mask SOI Fabrication Process for Linear and Angular Piezoresistive Accelerometers with on-Chip Reference Resistors[C]//Sensors,2005 IEEE.656-659.
[5]Kovács á,Vízváry Z.Structural Parameter Sensitivity Analysis of Cantilever-and Bridge-Type Accelerometers[J].Sens.&Actu.A,2001,89:197-205.
[6]Amarasinghe R,Dao D V,Toriyama T,et al.Simulation,Fabrication and Characterization of a Three-Axis Piezoresistive Accelerometer[J].Smart Mater.and Struc.,2006,15(6):1691-1699.
[7]Bahreyni B,Najafi F,Shafai C.Piezoresistive Sensing with Twin-Beam Structures in Standard MEMS Foundry Processes[J].Sensors and Actuators A,2007,127:325-331.
[8]Amarasinghe R,Dao D V,Toriyama T,et al.Development of Miniaturized 6-Axis Accelerometer Utilizing Piezoresistive Sensing Elements[J].Sensors and Actuators A,2007,134:310-320.
[9]Eklund E J,Shkel A M.Single-Mask Fabrication of High-gPiezoresistive Accelerometers with Extended Temperature Range[J].J.Micromech.Microeng,2007,17:730-736.
[10]Huang Shusen,Li Xinxin,Song Zhaohui,et al.A High-Performance Micromachined Piezoresistive Accelerometer with Axially Stressed Tiny Beams[J].J.Micromech.Microeng,2005,15:993-1000.
[11]許高斌,汪祖民,陳興.SOI特種高g值MEMS加速度計設計與分析[J].電子測量與儀器學報,2010,24(6):561-568.
[12]楊尊先,李昕欣,于映.曲面保護高量程加速度傳感器阻尼特性研究[J].光電工程,2006,33(9):139-144.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39