婦科術后凝血用熱極探頭的溫度控制系統設計
2011-10-19 12:46:58韋彩虹朱國忠陳裕泉
傳感技術學報 2011年8期
韋彩虹,雷 聲,朱國忠,陳裕泉,潘 敏
(浙江大學生物傳感器國家專業實驗室生物醫學工程教育部重點實驗室生物醫學工程系,杭州 310027)
熱極即熱探頭(Heat Probe,HP),是一種微型的溫控發熱單元。熱極治療主要是利用高溫熱極頭的熱傳導、熱輻射作用和接觸式壓迫作用,使局部壓迫出血的血管阻斷血流,即機械壓迫止血;導致靶組織脫水、凝固、灼燒乃至炭化、氣化(熱凝固封閉血管或者破壞增生組織,腫瘤組織),從而達到當即有效的治療目的[2]。
自1978年美國Prote1[1]首次用熱探頭治療消化道出血后,熱極治療在國內外已得到了廣泛的臨床應用[2-4]。熱極主要與內窺鏡配合用于消化道疾病(如胃潰瘍、消化道出血、糜爛性胃炎等等),溫度和外形體積要求高,目前,國內已有最高發熱溫度達250℃的熱極治療頭[2]。然而,熱極在其他方面的臨床應用仍然很少,也尚未涉及到婦科領域。
利用熱極的機械壓迫止血特性[5],熱極可以應用于婦科術后止血等領域,為此,本文設計了一個熱極探頭的溫度控制系統,屬于婦科手術使用的熱極治療設備的一部分,相對于消化道中使用的內鏡熱極,此熱極對溫度和外形體積要求相對較低。
本文設計的溫度控制系統基于MSP430F149單片機,采用高精度薄膜鉑電阻測溫、分段設置PID參數的PID算法控制,具有溫度設定、時間設定、實時溫度顯示、出錯示警、過流保護等功能,系統工作溫度和工作時間可調、精度高、靈活可靠。
1 原理與結構
熱極探頭外形同傳統熱極類似,為圓頭柱狀的不銹鋼外罩,但體積要求相對較低,因此加熱設備可采用功率和電壓選擇性大的加熱管,使設計靈活性提高,同樣也使系統的可控性增強。結構如圖1所示。
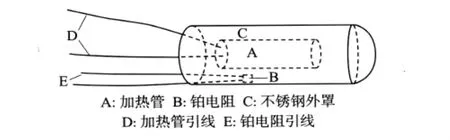
圖1 熱極外形結構
溫度控制系統要實現的功能包括:工作溫度設定(95℃ ~125℃),工作時間設定(1 min~15 min),熱極頭加熱達到工作溫度后,開始計時并保持溫度,計時時間達到設定的工作時間后自動斷流。具體工作原理如圖2所示。
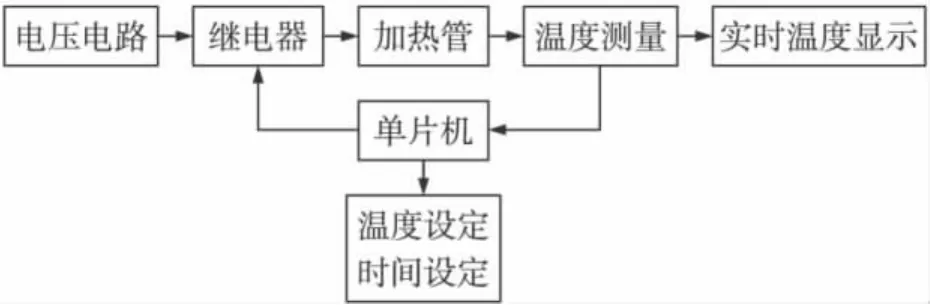
圖2 熱極工作原理圖
2 硬件設計
硬件系統采用MSP430F149單片機[6-7]作為控制核心部件,高精度、響應快速的薄膜鉑電阻作為測溫元件,加熱管作為加熱元件,繼電器作為加熱電路通斷控制器件。系統包括橋式測溫電路[8-9]、儀用放大電路、單片機控制電路、溫度和時間的設置電路、顯示電路、電壓轉換電路、報警電路以及過流保護電路。
采集到的溫度信號的精確與否直接影響整個系統的控制精度的高低,測溫元件以及測溫電路的選取非常重要。
選取測溫元件時,一方面考慮到系統控制的目標溫度為95℃ ~125℃,則測溫元件測試溫度的范圍不能太低,而常用的一些數字溫度傳感器測溫范圍過小,無法勝任;另一方面考慮到大部分成品的模擬溫度傳感器體積較大,而且傳感器中加入了信號的整合、穩定及處理等功能,可以得到較好的信號,但這勢必會增加信號的延時時間。熱極探頭體積較小、對溫度實時性要求較高,所以應選用體積小、延時時間少的傳感器元件。因此,本系統選用了薄膜鉑電阻作為測溫元件。薄膜鉑電阻是用真空沉積的薄膜技術把鉑濺射在陶瓷基片上,膜厚在2 μm以內,用玻璃燒結料把Ni(或Pd)引線固定,經激光調阻制成薄膜元件,具有體積小、精度高、靈敏度高、穩定、熱響應時間小、自熱系數低等優點。
圖3所示的系統采用的測溫電路和放大電路。首先,鉑電阻的工作電流是1 mA,0℃時阻值為100 Ω,則0℃時,鉑電阻上的電壓為100 Ω×1 mA=100 mV,這相當于一個基值電壓。單片機A/D的參考電壓是2.5 V,因此信號的放大倍數不可能很大。其次,溫度從0℃變化到150℃,鉑電阻的阻值線性地從100 Ω變到157.33 Ω,因此溫度每變化1℃,鉑電阻的阻值變化約為0.38 Ω,相應的電壓變化為0.38 mV,這個變化量相對于基值電壓而言是相當微小的。再次,電源存在一些微小的干擾,一般是毫伏級的,這些干擾極易把溫度信號湮沒。針對這些問題,為了得到更精確可靠的信號,提高控制精確,設計中采用了橋式電路。
放大電路采用了作為一級放大的儀用放大器和作為二級放大和低通濾波的運算放大電路。放大后的信號為0~2.5 V的電壓信號,單片機A/D引腳可以直接采集并使用。
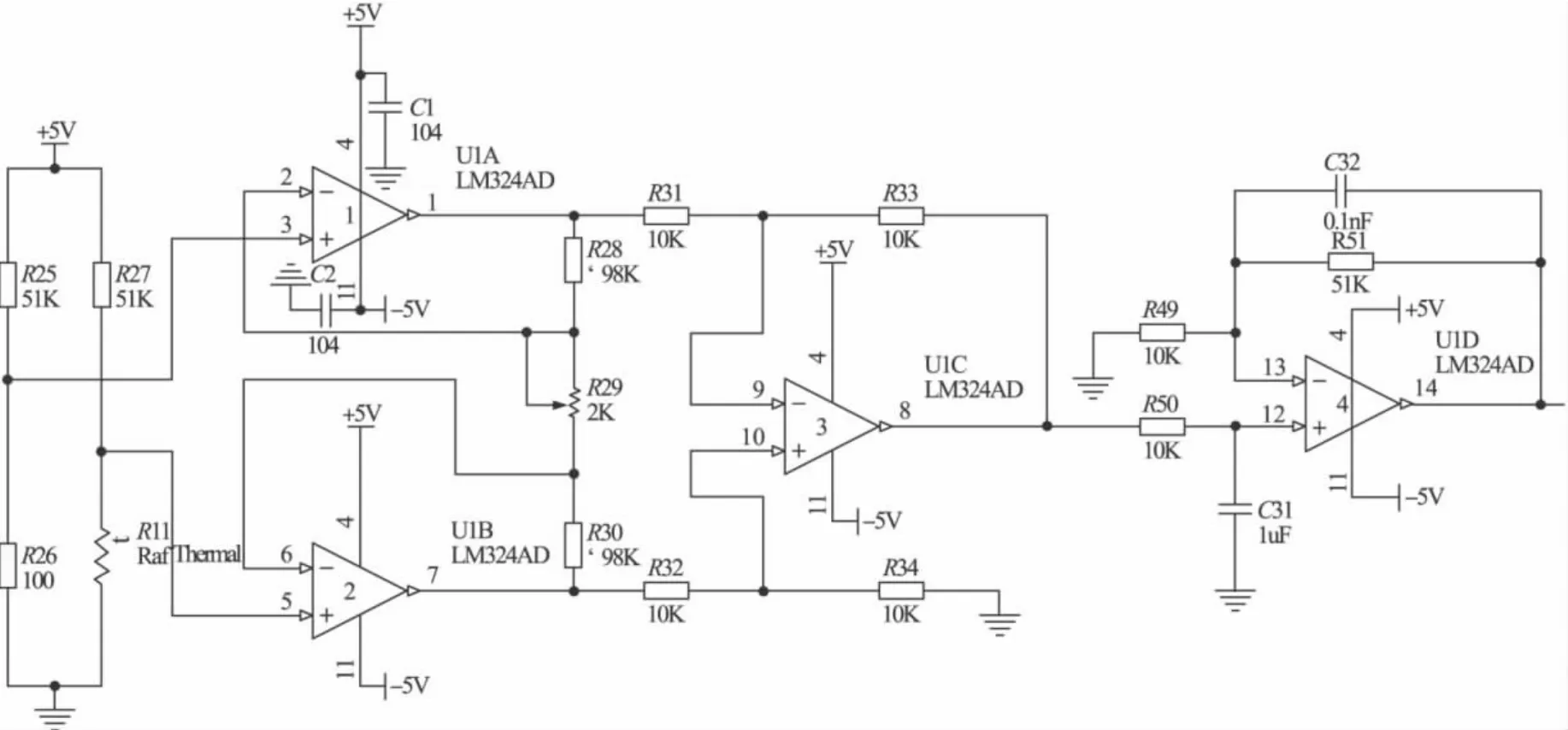
圖3 測溫電路圖
3 軟件設計
系統設計的軟件流程圖如圖4所示,其中控制算法采用了PID算法[10-14],并根據加熱管的實際應用情況,采用了分段設置PID參數的方法。
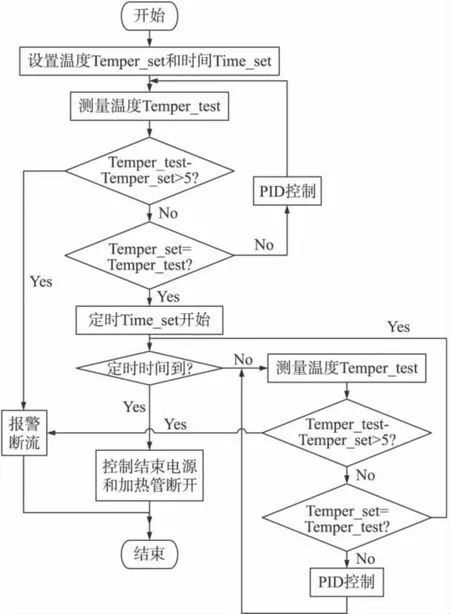
圖4 軟件流程圖
3.1 PID算法原理
按反饋控制系統偏差的比例P、積分I和微分D規律進行控制的調節器稱為PID調節器。模擬PID控制器系統框圖如圖5所示。圖中,r(t)為設定值,y(t)為系統的輸出值,兩者之間的差值即為控制偏差e(t),

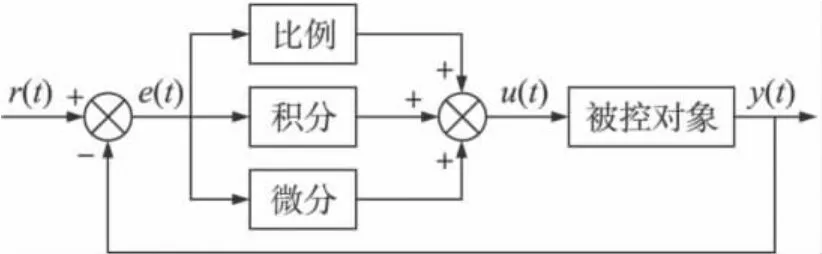
圖5 PID控制系統框圖
模擬PID控制以e(t)為輸入,u(t)為輸出控制被控對象,其控制規律為

式中,Kp為控制器的比例系數;Ti為控制器的積分時間,也稱積分系數;Td為控制器的微分時間,也稱微分系數。
數字PID位置型控制算法為了用數字形式的差分方程代替連續系統的微分方程,便于計算機實現,為此將積分式和微分項近似用求和及增量式表示,即
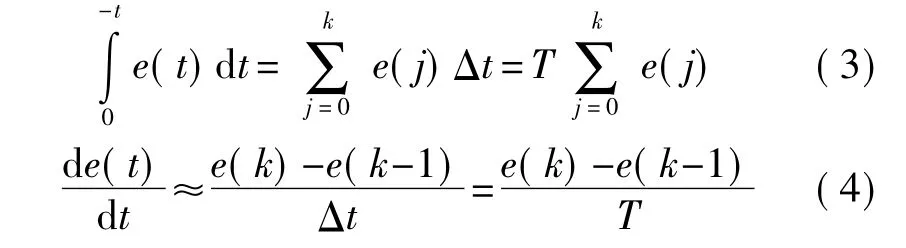
將式(3)和式(4)代入式(2),即可得到離散的PID表達式,為

3.2 分段設置PID參數的PID算法實現
PID調整時,由于過阻尼情況下,雖然無超調,但是過程緩慢,因此為了減少調節時間,一般選用欠阻尼情況,即有超調存在的情況,如圖6所示的PID調整曲線圖。曲線經過幾個振蕩周期調整后進入穩態,即可視為到達設定值,如圖6所示的紅點處。實際應用時,可將第n次(n由PID參數決定,波動進入誤差范圍內即可)經過設定值的點視為到達設定值的點,即為開始定時的點。
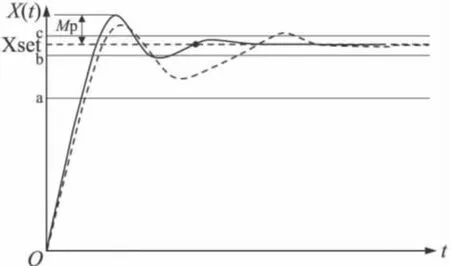
圖6 PID控制的調整曲線
系統控制的目標溫度在95℃到125℃之間,探頭暴露在空氣中,因此,探頭的溫度受環境溫度影響較大,加上探頭材料的特性,其調整曲線往往會出現如圖6所示的虛曲線的情況:上升過程中,PID算法的調整使探頭溫度升高,而環境溫度使之溫度下降,隨著溫度越來越接近設定值,溫度升高的能力越來越小,使之降溫的能力不變,因此其超調量往往會比較小;但是,下降過程中,相同PID參數時,只有在溫度低于設定值后PID才會控制其慢慢加熱,而這段時間探頭受環境溫度影響很大,溫度下降得很快,因此會出現振蕩負幅值比正幅值大很多的情況。負幅值很大,則相應的,再次上升到目標值所需的時間會拉長。因此這種情況下,調節時間也會相應地加長。
為了克服這種情況,我們采用了分段設置PID參數的方法,其中,a、b、c是3個根據實際應用情況取的閾值:
(1)X(t)<a時,即與設定值的偏差很大時,要求快速上升,減小偏差,起主要作用的是比例系數,此時,比例系數P可以取得很大;而積分系數的作用是消除穩態誤差,微分系數的作用是改善系統的動態性能,都可以忽略。
(2)當a<X(t)<Xset時,偏差在一定范圍內后使用P、I、D同時控制,根據實際情況調節三者的值達到最佳控制效果。其中b為中間的一個分段閾值,起到相當于粗調和微調的分界線作用,當X(t)<b時,比例系數稍微可以大一點;當X(t)>b后,減小比例系數,增大積分系數,使其緩慢上升。
(3)當X(t)>Xset時,不同于傳統PID控制,一旦大于設定值就不再加熱,我們設定了一個閾值c,到達c以后才不再加熱,這樣能在一定程度上補償環境溫度;類似,傳統PID要等到溫度下降到設定值后才開始加熱,而我們使其低于c值后就開始加熱來補償環境溫度的影響。
這種分段設置PID參數的方法帶來的影響就是會使最大超調量增大,但是在我們這個系統的應用中,最大超調量的影響并不大,所以可以忽略。
4 實驗與討論
測試實驗中,我們以95℃為目標溫度。用傳統的統一PID參數的方法,經參數調整后得到的結果如圖7(a)所示;用分段設置PID參數的方法得到的結果如圖7(b)所示;兩種方法對比實驗數據如表1所示。
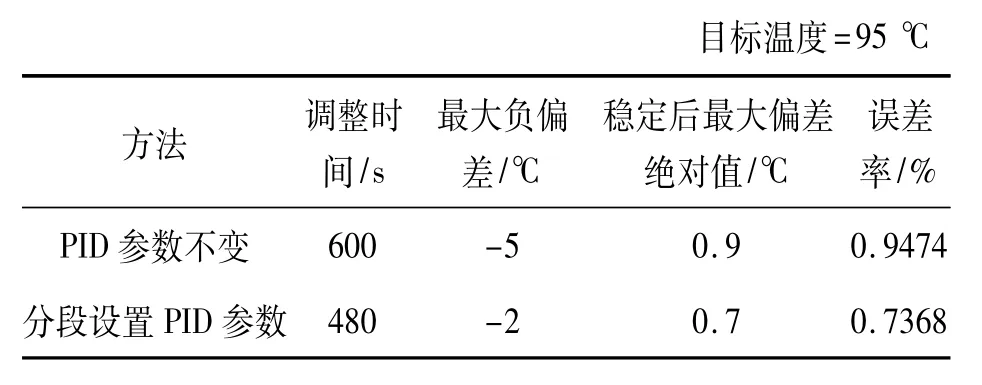
表1 PID參數不變情況和分段設置PID參數情況對比
從圖7和表1中,我們可以看出,統一PID的方法從38℃加熱到95℃需要的時間約為采集600個采樣點的時間,而分段設置PID參數的方法約為采集480個采樣點的時間。因此,分段設置PID參數的方法有效地縮短了調節時間,而且很好地克服了由于環境溫度帶來的影響。
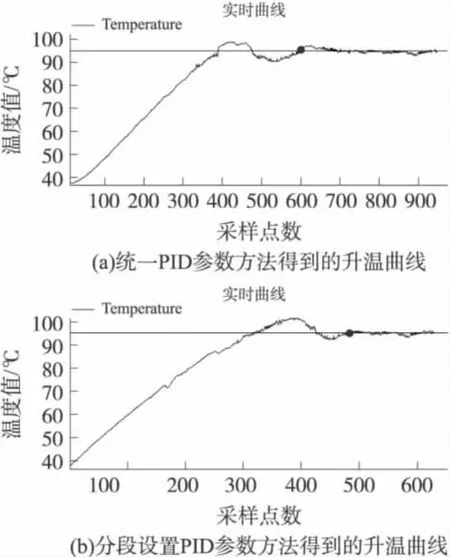
圖7 不同方法得到的升溫曲線
需要特別說明的是,到達穩定值(圖中黑點處)后定時器啟動,保持設定的時間,而探頭也是在這段時間內工作,因此,最大超調對它的影響并不重要,重要的是后面的穩定程度。根據是實驗可知,定時開始后,曲線仍然會有微小的波動,波動<±0.7℃,滿足熱極探頭的溫度要求。
5 總結
本文設計了一種用于婦科術后凝血用的熱極探頭的溫度控制系統,系統基于MSP430F149單片機,采用高精度、高靈敏度的薄膜鉑電阻測溫元件和橋式電路、儀用放大器放大采集溫度信號,分段設置PID參數的控制方法調節控制繼電器的通斷來控制加熱管加熱。此外,系統中還加入了目標溫度設置、定時時間設置、實時溫度顯示、過熱報警、過流保護等功能,使熱極探頭靈活可靠。
根據實際應用情況,系統控制用使用了分段設置PID參數的控制方法,一定程度上縮短了調節時間,補償了環境溫度造成的影響,取得了較滿意的效果。
[1]Protell R I,Rubin C E,Aurh D C,et al.The Heater Probe:A New Endoscopic Method for Stopping Massive Gastrointestinal Bleeding[J].Gastroenterology,1978,74(2 Pt 1):257-62.
[2]羅奎良.國內熱極治療的實驗研究和臨床應用近況[J].右江民族醫學院學報,2000,22(1):124.
[3]王小平,蔣鍵,宋茂海,等.HP-A內鏡熱極治療儀的研制和臨床應用[J].醫療衛生裝備,2006,27(7):25-26.
[4]Spyros Michopoulos,Panayotis Tsibouris,Helias Bouzakis,et al.Complete Regression of Barrett’s Esophagus with Heat Probe Thermocoagulation:Mid-Term Results[J].Gastrointestinal Endoscopy,1999,50(2):165-172.
[5]劉堃.內鏡下熱極治療非靜脈曲張性上消化道初學臨床分析[J].中國實用醫藥,2010,5(18):86-87
[6]段長習.基于430單片機的溫度檢測系統的設計與實現[J].科技創新導報,2008,24:52,54.
[7]馬江濤.單片機溫度控制系統的設計及實現[J].計算機測量與控制,2004,12(12):1219-1221,1229.
[8]李龍,韓震宇,劉麗,等.一種是用鉑熱電阻測溫電路[J].工業儀表與自動化裝置,2007,01:43-46.
[9]王利恒,李昌禧.熱式氣體流量計溫度補償研究[J].傳感技術學報,2008,21(8):1379-1382.
[10]鮑可進.PID參數整定的溫度控制[J].江蘇理工大學學報,1995,16(6):74-78.
[11]李濤,王圓妹.基于PWM的模糊PID溫度控制系統研究[J].自動化技術與應用,2008,27(10):32-34.
[12]夏大勇,周曉輝,趙增,等.MCS-51單片機溫度控制系統[J].工業儀表與自動化裝置,2007,01:43-46.
[13]Shiuh-Jer Huang,Yi-Ho Lo.Metal Chamber Temperature Control by Using Fuzzy PID Gain Auto-Tuning Strategy[J].WSEAS Transactions on Systems and Control,2009,4(1):1-10.
[14]周良,黎海文,吳一輝.具有溫度補償的小型生化分析儀溫度控制系統的研究[J].傳感技術學報,2008,21(11):1831-1834.
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
電子設計工程(2015年15期)2015-02-27 12:07:30