一種非線性PID控制器建模與仿真
2011-09-29 08:48:02厲兆慧
時代農機 2011年6期
關鍵詞:系統
厲兆慧,夏 洪
(東華理工大學 機械與電子工程學院,江西 撫州 344000)
由于PID控制器的簡單、有效以及不依賴于被控對象數學模型的特點,PID控制技術在控制實踐中的應用越來越廣泛。但是,傳統線性PID控制中,比例、積分和微分環節之間為線性組合,容易造成系統靜態與動態性能、跟蹤設定值與抑制擾動之間的矛盾。因此,有必要利用非線性特性來改造傳統的PID控制器,以獲得更高的控制性能。
本文通過分析PID各系數隨系統誤差信號的變化關系,分別給出了比例、積分和微分增益系數關于誤差信號的連續非線性函數。然后,用這3個函數代替傳統PID控制器的3個增益系數,從而獲得非線性PID控制器的可用模型。
通過對二階系統的數據仿真可以得出,非線性PID控制器可以改善傳統PID控制器在快速性和穩定性方面的缺陷,并且所設計的非線性PID控制器能大大降低系統階躍響應的上升時間,同時也證明了這類非線性PID控制器的有效性。
1 傳統的PID控制器
PID控制器具有簡單的控制結構,在實際應用中又較易于整定,因此它在工業過程控制中有著最廣泛的應用,大多數PID控制器是現場調節的,現在有很多不同類型的調節率,利用這些調節率,可以對PID控制器進行精確而細致的現場調節。
PID控制器的數學模型

其中,Kp為比例系數,Ti為積分時間常數,Td為微分時間常數,Ki為積分系數,Kd為微分系數,其中。
因此,PID控制器的設計就是確定PID控制器的3個參數,采用Ziegler-Nichols整定法則,通過實驗方法確定臨界增益和相應的周期,則PID控制器的參數計算公式為

對于簡單的PID控制器,上述參數一經整定,在整個過程中便要一直保持不變。這樣的控制器很難同時滿足跟蹤設定值和抑制擾動的要求,也無法適應過程特性的變化,而且傳統PID控制器中的線性組合常引起系統快速性與超調量之間的矛盾。
2 非線性PID控制器
要建立非線性PID控制器模型,最常用的方法是通過調整傳統PID控制器的系數Kp,Kd和來建立模型,而修改PID控制器系數最主要的方法還是根據系統輸出誤差e的大小來生成函數Kp(e(t)),Ki(e(t))和 Kd(e(t)),然后以這三個非線性函數來代替傳統PID控制器的系數。下面,可以通過分析系統的階躍響應曲線(見圖1)來構建非線性PID控制器的各環節的增益系數,從而獲得非線性PID控制器的可用模型。
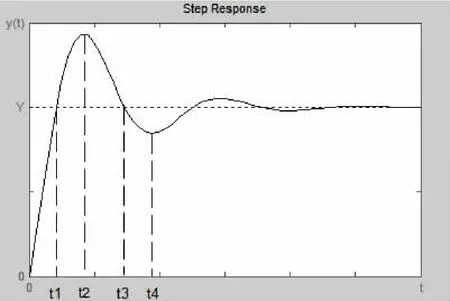
圖1 一般系統的階躍響應曲線
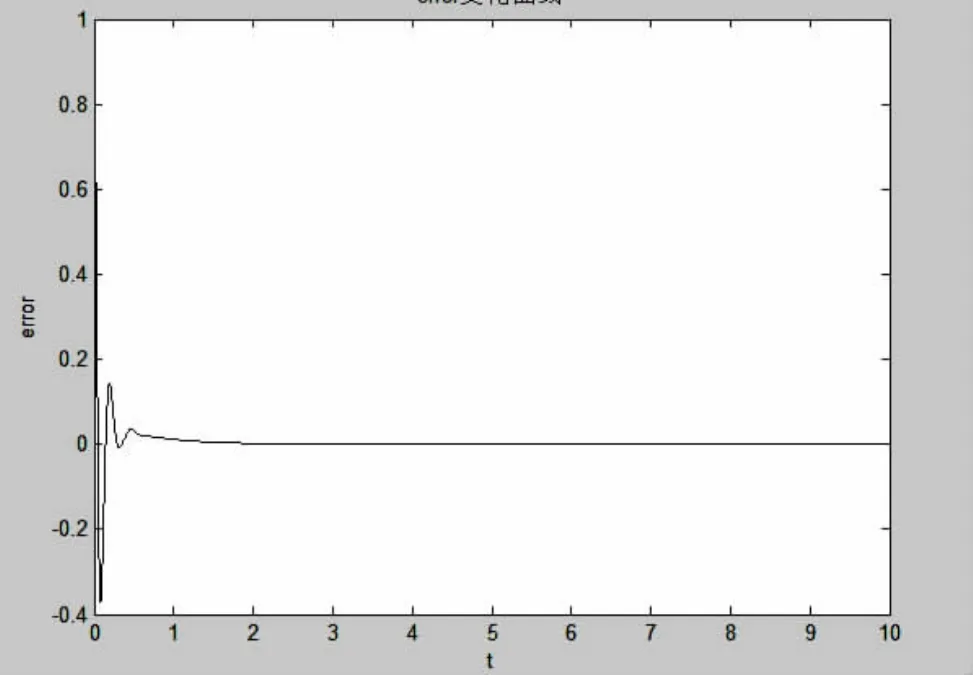
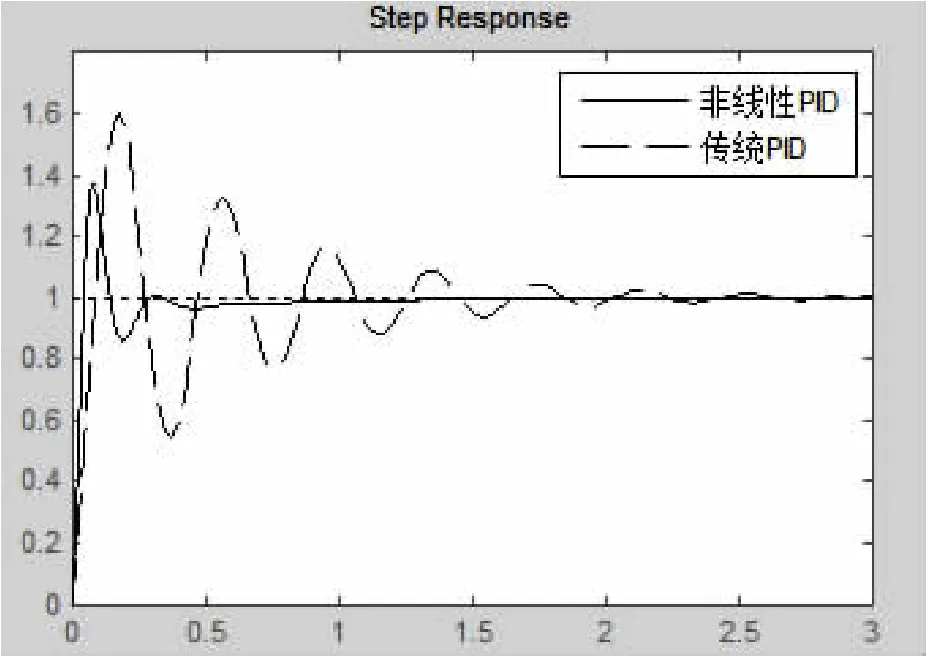
(1)比例系數Kp。比例系數的作用是能夠提高系統響應速度,減小超調。想要達到既快速又穩定調節的目的,就必須在遠離穩定值時,比例系數的絕對值應該大,而在穩定值附近時,比例系數的絕對值又應該很小。所以,在響應時間段0≤t≤t1,在初始時應該比較大,為了減小超調量,希望Kp隨著誤差e的減小而減小,在時間段t1 式中:ap,bp,cp為正實常數。 當 e→±∞ 時,取最大值 ap+bp,當e=0時,Kp取最小值ap,cp控制Kp的變化速率。 (2)積分系數Ki。積分環節的作用是消除系統的靜態誤差,如果積分系數過大會使系統的過渡過程變長。所以,當誤差信號較大時,希望Ki較小,以防止系統產生震蕩,有利于減小超調量;而當誤差較小時,希望Ki增大,以盡快消除系統的靜態誤差。即Ki絕對值與e(t)絕對值變化方向相反。由此,可以得出積分系數Ki可表示為:Kie(t))=aisech(bie(t)) 式中:ai,bi為正實常數; 當 e→±∞ 時,Ki取最小值 0,當e=0時,取最大值ap;bi的決定了Ki的變化速度。 (3)微分系數Kd。微分環節可以抑制超調量,增加系統阻尼,能起到提前校正系統的作用,但是會使系統的響應速度變慢。在0≤t≤t1時間段,Kd應逐漸由小變大,這樣就可以在不影響系統響應速度的前提下,抑制超調的產生;在t1 式中:ad,bd,cd,dd為正實常數; 當 e→-∞ 時,Ki取最大值ad+bd,當 e→+∞ 時,取最小值 ad,當 e=0 時,Ki取值為 ad+bd/(1+cd);dd決定了積分系數 Kd的變化速率。 由以上分析可知,如果非線性函數中的各項參數選擇合適的話,能夠使控制系統達到響應速度快,并無超調量的目的。由于非線性PID控制器中的各項增益系數能夠隨誤差e的變化而變化,因此其魯棒性也比傳統的PID控制器強。 (4)非線性PID控制模型。在得出上面各模塊的非線性函數Kp(e(t)),Ki(e(t)),Kd(e(t))之后,也就同時得出了非線性PID控制器的模型,即u(t)=[ap+bp(1-sech(cpe(t)))]e(t)+[aisech(bie(t))] 式中:ap,bp,cp,ai,bi,ad,bd,cd,dd均為正實常數。 為了驗證非線性PID控制器的有效性,利用MATLAB分別對傳統PID和非線性PID的單位階躍響應進行了數值仿真,被控對象為典型的二階系統,其傳遞函數為: 采用傳統的Ziegler-Nichols規則整定固定增益的傳統PID控制系數為:Ti=0.1,Td=0.025。 非線性PID控制器模型中的信號誤差e隨時間變化曲線如圖2所示,非線性增益系數Kp,Ki,Kd隨誤差信號e的變化曲線如圖3所示: 圖2 誤差e隨時間變化曲線 圖3 非線性系數隨誤差變化曲線 從圖 3可以看出 Kp,Ki,Kd的變化規律符合 PID控制原理,所以具有很好的仿真效果。在上述系數條件下,傳統PID控制器與非線性PID控制器的單位階躍響應如圖4所示。 圖4 非線性PID與傳統PID單位階躍響應比較圖 由圖4可見,非線性PID控制器的階躍響應速度明顯優于傳統固定增益系數的PID控制器的響應速度,非線性PID控制可以使系統快速穩定地收斂到給定的誤差范圍內,而傳統的PID控制不能穩定地收斂,系統存在大幅度的振蕩。可見,非線性PID控制比傳統的PID控制有更大的優越性和廣泛的適應性,可以應用于非線性系統中。 本文利用一種非線性函數對傳統PID控制器進行改造的方法,通過分析傳統PID控制系數隨系統誤差e變化的關系,分別給出了比例、積分和微分增益系數關于誤差信號的二次非線性函數,得到了比較靈活的增益策略,大大簡化了3個增益系數的非線性函數模型。通過對二階系統的階躍響應仿真可以看出,所提出的非線性PID控制器比傳統固定增益的PID控制器具有更好的動靜態性能,并且對于某些被控對象具有比傳統PID更好的調節性能及更大的穩定域。上述算法簡單容易且實現,因此具有較高的實際應用價值。但是,如果從理論上分析其具體的適用范圍、參數整定規則等,有待于進一步的深入研究。 [1]郭彥青,姚竹亭,王楠.非線性PID控制器研究[J].中北大學學報,2006,27(5),423-425. [2]蘇玉鑫,段寶巖.一種新型非線性PID 控制器[J].控制與決策,2003,18(1):126-128. [3]Wang Q G,Lee T H,Fung H W.PID tuning for improved perfor mance[J].IEEE Transactions on Control Systems Technology,1999,7(4):457-465. [4]劉金琨.先進PID 控制及其MATLAB仿真[M].北京:電子工業出版社,2002,11.3 仿真研究


4 結語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(2019年12期)2019-12-25 03:06:46制造技術與機床(2019年10期)2019-10-26 02:47:06中國洗滌用品工業(2019年4期)2019-05-11 09:27:34鐵道通信信號(2018年5期)2018-06-28 03:06:24家庭影院技術(2017年9期)2017-09-26 03:41:45知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19通信電源技術(2016年6期)2016-04-20 06:21:32