基于雙目立體視覺的手持式光筆三坐標(biāo)測量系統(tǒng)*
2011-09-26 09:31:06秦大輝劉建軍
制造技術(shù)與機(jī)床 2011年8期
秦大輝 毛 婷 劉建軍
(西南石油大學(xué)土木工程與建筑學(xué)院,四川成都610500)
物體點(diǎn)三坐標(biāo)測量技術(shù)在現(xiàn)代工業(yè)生產(chǎn)中有著重要的基礎(chǔ)作用,測量方式一般分為接觸式與非接觸式兩種。傳統(tǒng)的接觸式三坐標(biāo)測量機(jī)測量精度很高,但價格昂貴,且對實(shí)驗(yàn)室環(huán)境要求高,不能實(shí)現(xiàn)工業(yè)現(xiàn)場測量。非接觸式如結(jié)構(gòu)光測量系統(tǒng)[1],能夠快速獲取大量點(diǎn)云,但是沒有辦法獲取單個特征點(diǎn)的三維坐標(biāo),更不能測量深孔等遮光部分的三維坐標(biāo)。關(guān)節(jié)臂在局部范圍內(nèi)測量的柔性相對較高,但是柔性關(guān)節(jié)臂機(jī)械結(jié)構(gòu)復(fù)雜,造價昂貴。視覺坐標(biāo)測量是近年來測量領(lǐng)域中的新測量技術(shù)[2],可以實(shí)現(xiàn)工業(yè)現(xiàn)場測量,且能夠和結(jié)構(gòu)光組合起來從而對物體實(shí)現(xiàn)全方位測量。
國內(nèi)學(xué)者對手持式視覺坐標(biāo)測量技術(shù)進(jìn)行了深入的研究,取得了優(yōu)秀的成果。張之江提出了一種利用單相機(jī)測量系統(tǒng),但是存在局限性,如精度低、只能測距、不能得出被測點(diǎn)的三維坐標(biāo)[3-4]。黃風(fēng)山博士提出了一種單相機(jī)的手持式視覺測量模型,論證了單攝像機(jī)光筆測量系統(tǒng)能夠測量空間三維坐標(biāo),并且研制出了樣機(jī)[5]。但是,其模型要求手持式光筆標(biāo)志點(diǎn)嚴(yán)格在一條直線上,增加了加工難度,同時不可避免地會帶來一些誤差。青島大學(xué)解則曉提出了一種雙目光筆測量模型[6],但是仍然要求光筆上面粘貼的標(biāo)志點(diǎn)嚴(yán)格在一條直線上,同樣存在加工難度大、精度難以保證等缺點(diǎn)。
綜上所述,本文提出了一種簡單的手持式光筆三坐標(biāo)測量系統(tǒng),以帶有回光反射點(diǎn)的光筆作為手持式接觸測量工具,利用固定在支架上的兩個CCD相機(jī)組成的雙目立體視覺系統(tǒng)作為視覺測量手段。本系統(tǒng)對標(biāo)志點(diǎn)在光筆上的分布沒有特殊要求,具有柔性大、攜帶方便、結(jié)構(gòu)光簡潔、加工及安裝簡單等優(yōu)點(diǎn)。
1 系統(tǒng)組成及工作原理
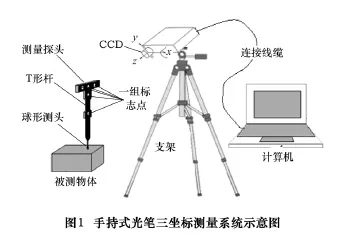
系統(tǒng)組成如圖1所示。該系統(tǒng)的整個結(jié)構(gòu)主要包括2臺參數(shù)相同的面陣CCD攝像機(jī),用于固定2臺相機(jī)的固定板和三角支架,1只手持式光筆接觸測量T形桿(T形桿的正面粘貼有5個回光反射點(diǎn))和1臺運(yùn)行配套測量軟件的筆記本電腦。
手持式光筆的設(shè)計是本測量系統(tǒng)設(shè)計的關(guān)鍵,經(jīng)過試驗(yàn)、研究,確定光筆結(jié)構(gòu)如圖2所示。光筆上面的發(fā)光標(biāo)志,多采用 LED[5-6]。LED 因其光源的各種優(yōu)異特性在機(jī)器視覺中獲得普遍應(yīng)用,但是,LED光源昂貴,如要安裝在光筆上則需要對光筆進(jìn)行復(fù)雜的加工及安裝。回光反射標(biāo)志點(diǎn)(Retro-reflective tagrgets(retro-targets)),是西歐和北美等技術(shù)發(fā)達(dá)國家近年來在實(shí)施高精度工業(yè)攝影測量和特種攝影測量時,粘貼在被測物體表面上的一種輔助人工標(biāo)志[7]。它能夠反射的亮度較普通打印的漫反射白色標(biāo)志點(diǎn)的反射亮度高出成百上千倍,可以直接粘貼在光筆上,非常方便且價格便宜。因此,本文采用回光反射點(diǎn)作為光筆上的標(biāo)志點(diǎn),且標(biāo)志點(diǎn)本身分布和標(biāo)志點(diǎn)分布與測頭位置都沒有特殊要求。

在進(jìn)行測量的時候,測頭接觸被測表面,攝像機(jī)攝取筆體上的回光反射標(biāo)志點(diǎn)的圖像,再經(jīng)由圖像采集卡對圖像進(jìn)行采集后送入計算機(jī)內(nèi)存,再通過研發(fā)的軟件進(jìn)行圖像處理得到各個標(biāo)志點(diǎn)的像面坐標(biāo),并解算出被測面上測頭接觸點(diǎn)的三維坐標(biāo)。
2 雙目立體視覺系統(tǒng)的建立與標(biāo)定
對兩臺攝像機(jī)組成的雙目立體視覺系統(tǒng)進(jìn)行標(biāo)定是手持式坐標(biāo)測量工作的首要步驟。立體視覺標(biāo)定就是兩臺攝像機(jī)的內(nèi)部參數(shù)和相對位置。完成標(biāo)定之后,可通過雙目立體視覺系統(tǒng)模型,得到圖像上同名點(diǎn)的空間三維坐標(biāo)。在標(biāo)定前,要先建立攝像機(jī)的模型。
2.1 基于中心投影的小孔成像模型
基于中心投影的小孔成像模型是機(jī)器視覺精確測量中普遍采用的相機(jī)模型。一個三維空間點(diǎn)通過點(diǎn)透視投影到圖像平面得到像點(diǎn)坐標(biāo),其定義為:
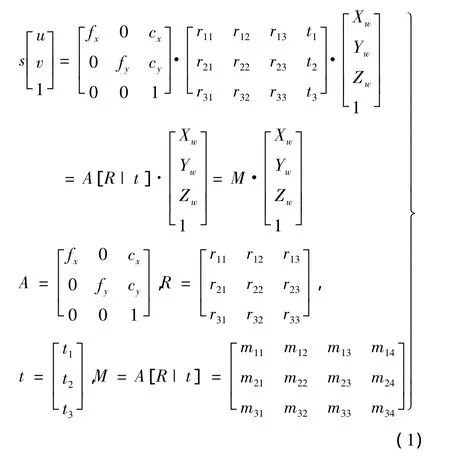
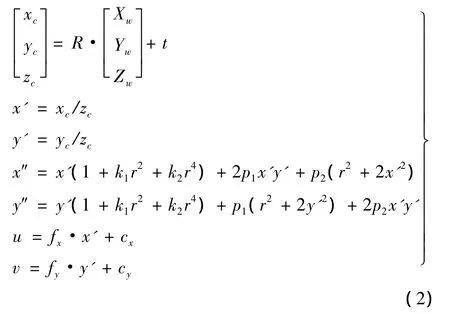
式中:(Xw,Yw,Zw)是1 個三維點(diǎn)的世界坐標(biāo);(u,v)是點(diǎn)在圖像平面的投影坐標(biāo),以像素為單位;A稱為相機(jī)的內(nèi)參數(shù)矩陣;(cx,cy)是主點(diǎn)坐標(biāo);fx和fy是以像素為單位的在水平和豎直方向的有效焦距。鏡頭都會存在一些畸變,主要有徑向畸變和切向畸變,因此,需要對模型加以修正。
2.2 相機(jī)標(biāo)定與雙目立體視覺三維空間點(diǎn)坐標(biāo)求取
在建立相機(jī)模型后,對組成雙目立體視覺系統(tǒng)的相機(jī)進(jìn)行標(biāo)定。在機(jī)器視覺測量領(lǐng)域,標(biāo)定技術(shù)已經(jīng)成熟,主要以Tsai的兩步法[8]和張正友的平面標(biāo)定法[9]為代表。張正友的平面標(biāo)定法,不需要三維標(biāo)定物,柔性大。本文直接采用張正友的標(biāo)定方法來對相機(jī)進(jìn)行標(biāo)定。在標(biāo)定出相機(jī)的內(nèi)部和外部參數(shù)后,設(shè)一對左右圖像的對應(yīng)點(diǎn),都可以代入公式(1),從而得到兩對方程組,進(jìn)行化簡后,可以得到
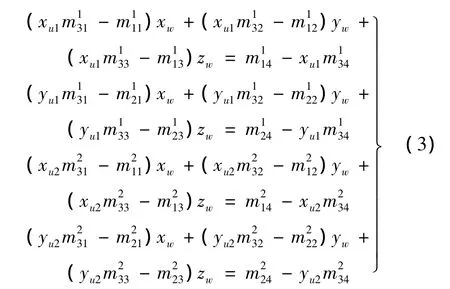
公式(3)中包含有3個未知數(shù),由4個方程組成,因此可以通過最小二乘求得被測點(diǎn)的三維空間坐標(biāo)。
3 光筆測量系統(tǒng)原理
本文設(shè)計的光筆測量系統(tǒng)在工作時,首先根據(jù)雙目立體視覺原理求取光筆上粘貼標(biāo)志點(diǎn)的三維坐標(biāo),再根據(jù)光筆的結(jié)構(gòu)參數(shù)來解算出被測點(diǎn)的空間坐標(biāo)。
3.1 光筆標(biāo)志點(diǎn)標(biāo)定
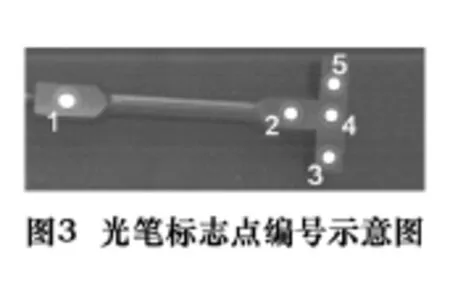
因?yàn)楣夤P上標(biāo)志點(diǎn)是平面標(biāo)志物,因此無法通過傳統(tǒng)的機(jī)械三坐標(biāo)來獲得其在光筆坐標(biāo)系下面的坐標(biāo),也不能依靠機(jī)械加工中的定位來粘貼標(biāo)志點(diǎn)從而獲得標(biāo)志點(diǎn)的三維坐標(biāo),因?yàn)椴蝗菀卓刂普`差,而本系統(tǒng)作為測量設(shè)備精度要求較高。為此本文采用攝影測量中非常成熟且精度高的光束法平差[10]技術(shù)來對光筆標(biāo)志點(diǎn)進(jìn)行標(biāo)定,從而得到光筆上面的5個標(biāo)志點(diǎn)的三維空間坐標(biāo),從點(diǎn)1到點(diǎn)5三維 坐 標(biāo) 分 別 為: (4.841,4 9.993,7.831),(-1.436,-33.427,19.999),(-20.464,-49.013,22.296),(-2.548,-50.330,22.463),(10.869,-51.655,22.533)。
3.2 光筆測頭中心位置自標(biāo)定算法
求解光筆測頭在有光束法平差標(biāo)定光筆標(biāo)志點(diǎn)所建立的光筆坐標(biāo)系下的坐標(biāo)這一過程稱為光筆測頭位置自標(biāo)定。本文提出了基于位置不變原理的多姿態(tài)光筆測頭位置自標(biāo)定算法。
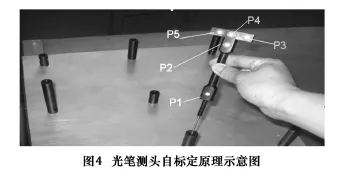
如圖4所示,把光筆放置在同一個圓錐孔內(nèi),隨意傾斜角度,采集光筆n個不同姿態(tài)下的圖像,通過雙目立體視覺測量算法,就可以獲得n組光筆標(biāo)志點(diǎn)在攝像機(jī)坐標(biāo)系下的三維坐標(biāo):{Pc1(xic1,yic1,zic1),Pc2(xic2,yic2,zic2),Pc3(xic3,yic3,zic3),Pc4(xic4,yic4,zic4),Pc5(xic5,yic5,zic5)},i=1,2,…,n -1,n。其中每組都包含了全部5個標(biāo)志點(diǎn)的三維坐標(biāo)。
通過前述的光筆標(biāo)志點(diǎn)標(biāo)定算法,此前也已經(jīng)獲得了光筆5個標(biāo)志點(diǎn)在光筆坐標(biāo)系下面的三維空間坐標(biāo):{Pg1(xg1,yg1,zg1),Pg2(xg2,yg2,zg2),Pg3(xg3,yg3,zg3),Pg4(xg4,yg4,zg4),Pg5(xg5,yg5,zg5)},此時標(biāo)志點(diǎn)在不同坐標(biāo)系下的關(guān)系,可以通過剛體變換用公式(4)來聯(lián)系。
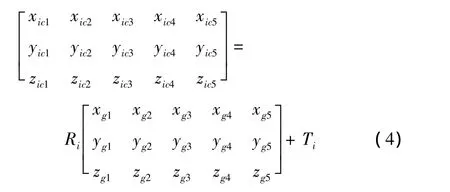
可利用SVD來解算出公式(4)中的Ri與 Ti[11]。設(shè)光筆球形測頭中心在光筆坐標(biāo)系的坐標(biāo)為Pg=[xgp,ygp,zgp]T,在攝像機(jī)坐標(biāo)系的坐標(biāo)為 Pc=[xgc,ygc,zgc]T,則同樣可以根據(jù)公式(4)建立的兩個坐標(biāo)系的剛體變化關(guān)系,可以得到下面方程組:

式(5)中,方程兩兩相減到一個新的方程組:
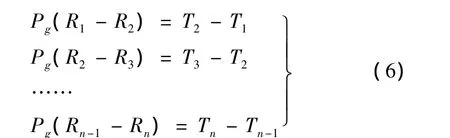
由于方程組(6)是個線性方程組,未知數(shù)為3個,因此只要n≥2即可解算出Pg。為了增加穩(wěn)定性和可靠性,本文左右兩CCD攝像機(jī)拍攝至少6組共12幅圖像,通過最小二乘法來求解光筆球形測頭在光筆坐標(biāo)系的坐標(biāo)Pg。標(biāo)定Pg后,在實(shí)際測量中,即可由PgR+T=Pc,求出被測物體點(diǎn)的三維坐標(biāo)。從而實(shí)現(xiàn)了基于雙目立體視覺的手持式光筆的接觸式測量。
4 光筆測量系統(tǒng)精度評估
為了評價光筆的測量精度,使用光筆對一個已知半徑為25.402 mm的標(biāo)準(zhǔn)陶瓷球進(jìn)行了測量,為了得到可靠的擬合結(jié)果,本文采用具有工業(yè)標(biāo)準(zhǔn)的Imagewear.軟件來進(jìn)行測量點(diǎn)的擬合,擬合出來的結(jié)果如圖5所示。通過擬合測量點(diǎn),得出擬合球的直徑為:25.486 5 mm,相比較陶瓷球的標(biāo)準(zhǔn)直徑25.402 mm,具有0.084 mm的偏差。對同一個測量球進(jìn)行100次的測量,測量結(jié)果的標(biāo)準(zhǔn)偏差為0.018 mm。通過對如圖4的標(biāo)定板上面的圓柱間的距離進(jìn)行測量,在226.274 mm的標(biāo)稱距離上,測量的結(jié)果是226.192 mm。其偏差為0.082 mm。對同樣的位置距離進(jìn)行100次測量,測量結(jié)果的標(biāo)準(zhǔn)偏差為:0.021 mm。結(jié)果表明測量系統(tǒng)具有良好的穩(wěn)定性和可靠性。
5 結(jié)語
本文提出了一種以粘貼回光反射標(biāo)志點(diǎn)的手持式光筆作為接觸式測量工具,基于雙目立體視覺系統(tǒng)的手持式光筆三坐標(biāo)測量系統(tǒng)。它具有操作簡單,結(jié)構(gòu)簡單的特點(diǎn),手持式光筆在結(jié)構(gòu)上對測頭和標(biāo)志點(diǎn)的分布沒有特殊要求,降低了光筆的結(jié)構(gòu)復(fù)雜度,減少了誤差源,提高了測量精度。通過實(shí)驗(yàn)證明,本系統(tǒng)穩(wěn)定可靠,可以作為非常接觸式結(jié)構(gòu)光測量的有力補(bǔ)充。
[1]QIN Dahui,LI Zhongwei,WANG Congjun,et al.3 - D shape measurement of complex objects by combining color-coded fringe and neural networks[J].Tsinghua Science and Technology,2009,14(S1):66 -70.
[2]Hocken R H J,Hocken R J.Coordinate measuring machines and systems[M].Second Edition.Taylor and Francis,2010.
[3]張之江,車仁生,黃慶成,等.單攝像機(jī)測頭成像視覺坐標(biāo)測量系統(tǒng)建模[J].儀器儀表學(xué)報,1999(5):59-62.
[4]張之江,車仁生,黃慶成,等.測頭成像視覺坐標(biāo)測量系統(tǒng)中特征點(diǎn)成像中心獲取[J].光學(xué)精密工程,1998(5):14-20.
[5]黃風(fēng)山,錢惠芬.光筆式單攝像機(jī)三維坐標(biāo)視覺測量系統(tǒng)建模[J].光電子.激光,2007(1):85-88.
[6]解則曉,金明,辛悅向.基于雙目立體視覺的光筆式三坐標(biāo)測量系統(tǒng)[J].中國機(jī)械工程,2008(8):896-899.
[7]Luhmann T,Robson S,Kyle S,et al.Close range photogrammetry:principles,techniques and applications[M].Hoboken,New Jersey:John Wiley & Sons,Inc.,2007.
[8]Tsai R Y.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J].IEEE Jouranl of Robotics and Automation,1987,3(4):323 -344.
[9]ZHANG Z.A flexible new technique for camera calibration[J].IEEE Transactionson Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[10]Luhmann T,Robson S,Kyle S,et al.Close range photogrammetry:principles,techniques and applications[M].Hoboken,New Jersey:John Wiley & Sons,Inc.,2006.
[11]秦大輝,王從軍,史玉升,等.4軸3D激光測量系統(tǒng)中旋轉(zhuǎn)工作臺參數(shù)標(biāo)定[J].華中科技大學(xué)學(xué)報:自然科學(xué)版,2009(6):129-132.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
