懸停式AUV控制策略研究
2011-09-24 05:55:16李文濤
海洋工程 2011年1期
關鍵詞:控制策略
李文濤,葛 彤
(上海交通大學海洋工程國家重點實驗室,上海 200030)
懸停式AUV控制策略研究
李文濤,葛 彤
(上海交通大學海洋工程國家重點實驗室,上海 200030)
以懸停式AUV“MM-01”為試驗平臺,設計一種基于行為的控制體系結構。將AUV的行為劃分為漫游、巡航和避障三個基本行為,并將模糊控制引入避障行為中,通過基于優先級的仲裁方式實現三種行為的有序協調,完成預定任務。同時,針對AUV的懸停需求,提出了增加內環速度反饋實現AUV穩定懸停的控制方法,定義一種新的高層自治控制系統與底層運動控制系統的接口。最后,通過建立整個系統的Simulink仿真模型,驗證了該控制策略的有效性。
AUV;懸停;基于行為;優先級仲裁;仿真
Abstract:A control architecture based on behaviors is designed for the hovering-type AUV test bed“MM-01”.Three basic behaviors,including Wander,Cruise and Obstacle-Avoid,realized by fuzzy logic control,are defined.AUV′spredefinedmission can be performed by the sequential coordination of those behaviors based on priority.Besides,this paper proposes to introduce inner-loop velocity feedback into motion control to realize AUV′shovering function and definesa new kind of interface between high-level autonomous control block and low-levelmotion control block.Finally the simulation of thewhole system is executed in Simulink and the results validate the efficiency of the designed control strategy.
Key words:AUV;hovering;behavior-based;coordination based on priority;simulation
根據使命任務的不同,AUV(無人自治潛水器)可以分為巡航式AUV和懸停式AUV,前者用于大范圍的海域調查,后者用于小范圍內的精確定點調查和作業[1]。巡航式AUV在海洋調查中已經獲得越來越廣泛的應用,而懸停式AUV是近年來出現的一種新型潛水器,它能依靠自身的推力系統,在控制系統的指揮下抵抗海流和自身作業等引起的內外擾動,使其保持某一姿態懸停于空間某一特定位置[2],即具備一種動力定位能力。懸停式AUV既有AUV的自治能力,又有ROV的機動能力,其發展目標是成為一種高度自治并能夠實現精確定點調查和作業的新型潛水器。由于在海底熱液噴口的觀察取樣和海洋結構物探測方面具有不可替代的重要作用,懸停式AUV的研究具有顯而易見的重要意義,各國相繼積極開展了相關研究[3-4]。
控制策略是AUV自主地完成各種任務的指導思想,因而控制策略研究是設計懸停AUV的首要步驟。傳統的機器人控制方法是建立在嚴格精確的控制系統數學模型的基礎上,無法適用于具有強耦合性和非線性特點的AUV及其復雜多變的未知環境,而基于行為的控制結構是一種反應式結構,不需建立全局世界模型,因而非常適用于AUV的控制體系。AUV控制體系包括自治控制系統和運動控制系統,二者的功能劃分及其接口定義是整個體系設計的基礎。此外,AUV的動力定位是依靠垂推和側推實現的,對具體的控制方法進行深入探究有助于提高動力定位的性能。在控制策略的上述方面進行了綜合研究,并完成了仿真,結果驗證了設計的控制策略的有效性。
1 懸停式AUV使命任務與本體結構
為了實現精確定點作業和調查的功能,AUV必須能夠在三維空間內從起始點自治地駛向目標終點并懸停,其中起始點、子目標點和終點預先定義,如圖1所示。航行過程中若發現前方有障礙物,AUV須自動避障,之后尋找原軌跡繼續駛向目標點。若丟失對當前位置導航信息的感知,則以大范圍回轉方式漫游,直至重新獲得導航信息。
AUV的本體“MM-01”如圖2所示,由主艇體和左右兩個電池艙組成。主艇體分為前后艙,分別為設備艙和電控艙。AUV共有4個推進器,包括兩個縱向主推、一個側推和一個垂推。兩個主推方向與縱軸平行,垂推和側推均布置在AUV中橫剖面位置,推進器的布置符合對稱原則,這樣保證了AUV具有四個自由度的機動能力:進退、側移、潛浮和轉首。值得注意的是:設計側推的目的是使AUV具備懸停能力,這是與常規的巡航式AUV的推進器布置方面的最大區別,也是懸停式AUV結構方面的最本質特征。
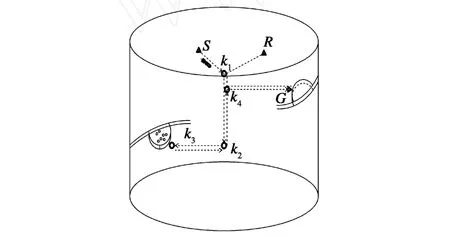
圖1 AUV的使命任務Fig.1 AUV′smission

圖 2 “MM-01”本體Fig.2 Main body of“MM-01”
2 AUV控制策略設計
2.1 AUV控制體系結構
“MM-01”的控制體系結構如圖3所示,包括任務使命、行為決策、底層運動控制、AUV和傳感器模塊,其中任務使命和行為決策模塊共同構成了AUV的高層自治控制系統。任務使命模塊內部保存航行任務參數,由于比較簡單,該模塊實際被分解到了行為決策模塊的不同行為中。行為決策模塊包括基本行為和仲裁器,前者包括漫游、巡航、避障,仲裁器用于協調多個行為的沖突。自治控制系統將計算得到的控制指令送給底層運動控制器,后者得到各自由度的推力和力矩,經推力分配送給AUV。
2.2 具備懸停功能的運動控制系統設計
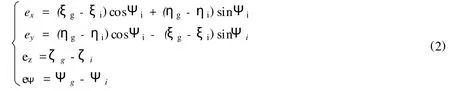
非智能潛水器的經典運動控制模式如圖4所示。其中ξ、η、ζ、Ψ分別表示潛水器在絕對坐標系中的三維坐標和首向角,下標g表示期望值,i表示實際值;ex、ey、ez、eΨ分別表示潛水器與目標點在運動坐標系中的三維坐標偏差和首向角偏差。由于懸停式AUV常在低速下運動,可以將運動控制分為水平面控制和垂直面控制,并近似認為各自由度之間不存在耦合關系,然后分別設計控制器。為了實現AUV的懸停功能,在水平面運動控制回路中,除對偏差信號進行比例控制外,提出引入內環反饋即速度(角速度)反饋的思想,這將大大改善閉環性能,使系統更易穩定。
為了更好地實現清晰分工的模塊化思想,定義高層自治控制系統與運動控制系統的接口為e=[exeyezeΨ],并將圖4虛線框中的部分定義為運動控制模塊。
水平面和垂直面運動控制律:
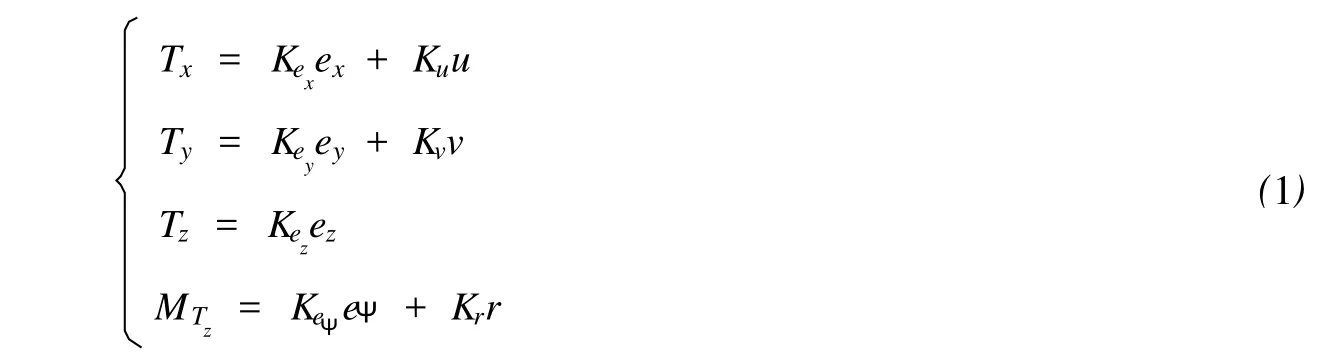
式中:Kex、Key、KeΨ、Kez為偏差比例調節系數 ,符號為正;Ku、Kv、Kr為速度反饋增益系數 ,符號為負。
由于四個推進器按前述方式對稱布置,Tx和MTz經過推力分配得到兩個水平主推的推力,Ty和Tz則分別對應側推和垂推的推力。
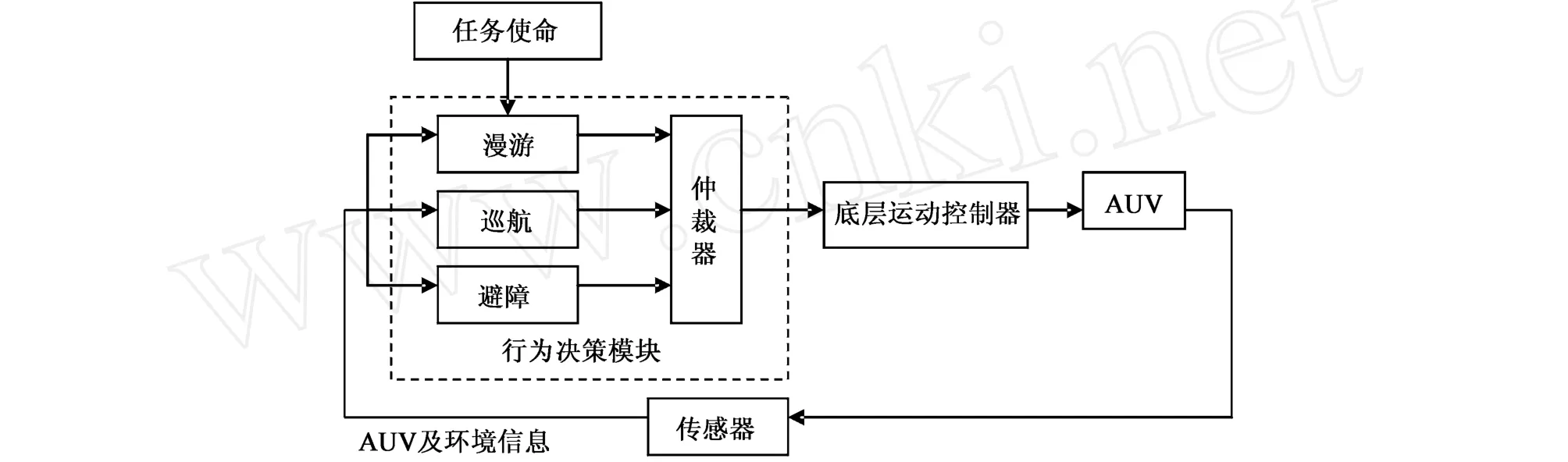
圖3 MM-01控制體系結構Fig.3 Control structure of“MM-01”
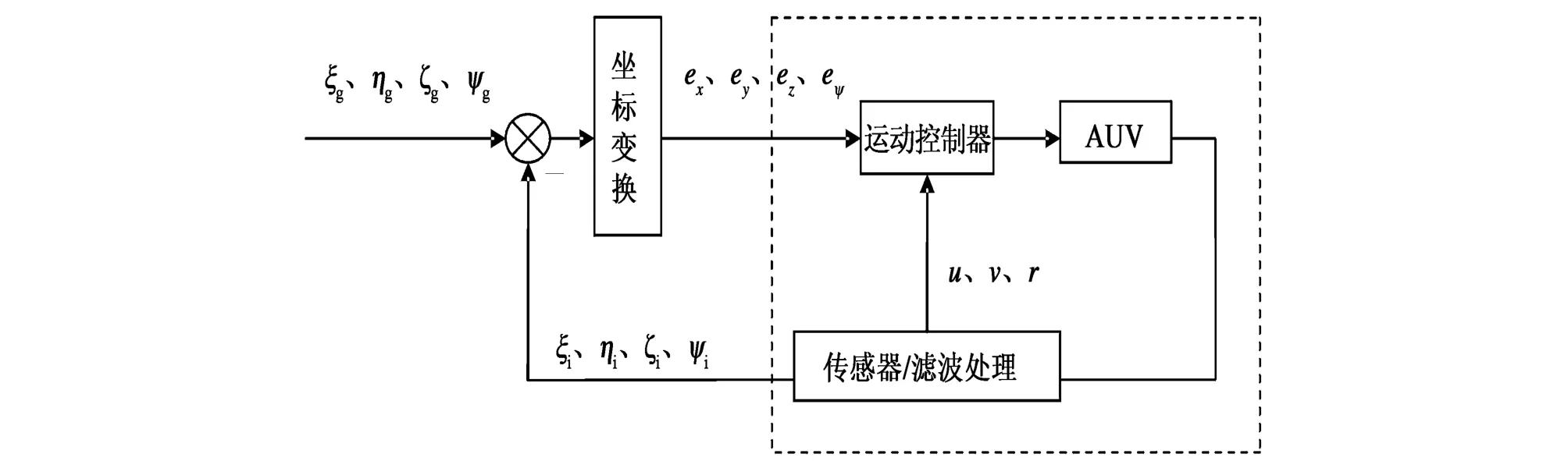
圖4 運動控制原理Fig.4 Motion control scheme
2.3 基于行為的自治控制系統設計
2.3.1 行為接口與仲裁
基本行為與仲裁器的接口指令eb同時包括相應的行為激活指示符和目標點與潛水器在運動坐標系中的三維位置偏差和首向偏差,即eb=[bisactiveexeyezeΨ],其中bisactive是布爾變量,對漫游、巡航、避障行為而言分別是Wanderactive、Cruiseactive、Aroidactive,表示某行為是否激活,是則bisactive=1,否則bisactive=0。
若在同一時刻有多個行為被激活,則由仲裁器決定哪個行為的指令此刻將得到執行。采用基于固定優先級機制的仲裁器,事先設定不同行為的優先級。當多個行為同時發生時,優先級高的行為將首先得到執行,低優先級的行為被抑制,直到沒有優先級比它更高的行為激活時,低優先級的行為才得到執行。換言之,仲裁器的輸出為e=[exeyezeΨ],對應當前時刻激活行為中優先級最高的行為送出的指令偏差。優先級的高低根據行為的重要性和緊急情況設定,中的三個行為按優先級從低到高依次是漫游、巡航、避障。漫游行為是底層的本能行為,始終激活,用于在失去位置導航信息的時候隨機漫游,以等待優先級更高的任務被激活。巡航行為用于完成三維空間內的軌跡遍歷,在當前位姿可測時激活。如果前進路徑上出現障礙物,且障礙物危及到了潛水器的自身安全(到潛水器的距離小于5 m),則避障行為被激活。巡航行為具有目標導向功能,而避障行為具有實時反應能力,通過二者的協同作用,潛水器可以實現繞過障礙物抵達目標點的任務。
2.3.2 漫游行為
漫游行為有以下兩種模式:
1)當潛水器能獲得當前絕對位置導航信息時,游向固定點。行為自身存儲目標點坐標以引導潛水器的運動。只需實時計算潛水器與目標點在絕對坐標系下的三維位置偏差和首向角偏差,進行坐標變換得到ewander=[WanderactiveexwandereywanderezwandereΨwander]即可。
2)當潛水器不能獲得當前絕對位置導航信息時,按固定方式運動。由于本研究中采用水池中央頂部的攝像頭對AUV進行絕對定位,當AUV在視野邊緣或光線不足時,可能導致攝像頭無法捕獲AUV當前絕對坐標ξ、η,此時漫游行為輸出常值偏差指令ewander=[WanderactivelcoseΨlsineΨ0eΨ],eΨ可設定為范圍在[0]內的任意值,即潛水器以一定的半徑大范圍回轉(半徑大小可由調整),直至攝像頭重新獲得潛水器的絕對坐標。
2.3.3 巡航行為
行為實時比較當前位姿和由子目標點決定的期望位姿得到偏差指令,如式(2)所示。
式中各變量的含義與2.2節相同。行為自身預存航行任務參數,包括各目標點位置坐標和遍歷順序。設計中規定兩個相鄰子目標點須保證在同一水平面上或不同水平面的同一垂線上,這樣AUV就只有兩種基本運動狀態:定深航行和垂直潛浮。二者的控制策略如下:
1)定深航行:當潛水器距離當前子目標點較遠時,Ψg為當前位置和目標點連線的方向角,該值隨AUV的運動實時變化;當潛水器距離目標點非常近時,Ψg設定為某一常值(如上一子目標點與當前子目標點的連線在絕對坐標系中的方向角),即進行定向航行。這樣可以避免潛水器在距離目標點非常近時頻繁調整首向的情況,從而最終懸停在目標點。
2)垂直潛浮:類似地,設定Ψg為某一常值(潛水器在上一子目標點處的懸停首向角)。
每次到達當前子目標點,則從數據庫中取出下一個點作為新的當前子目標點,直至到達終點。巡航行為的輸出為
2.3.4 避障行為
借鑒人類避障的思想,利用模糊控制方法設計模糊避障控制器[5],解決避障問題。
巡航行為中的當前目標點是固定的,AUV只需實時比較當前位置與當前目標點之間的偏差,即可得到控制指令eb。而避障行為則完全不同:由于障礙物外形是不可預測的,AUV的航行路線也是不可預測的,所以航行過程中的當前目標點是實時變化的,將其定義為“虛目標點”。為簡單起見,將“虛目標點”始終設定為AUV左前方或右前方2 m處的點,目標點方向與當前首向的夾角大小和正負由控制器決定。避障示意如圖5所示。避障傳感器為前視攝像機和激光器,激光器安裝在AUV的頭部兩側,間距0.5 m,安裝方向與AUV的軸線平行,配合攝像機可以測得左右兩側到障礙物的距離dl、dr。設計模糊避障控制器,輸入量為dl、dr。輸出量為轉向角增量ΔΨ(為方便計,后面用Ψ表示),如圖6所示。
輸入量的論域為{0,5},模糊集合為di={nearmedfar},i=l,r;輸出量Ψ的論域為模糊集合為{NBNSZOPSPB}。其中near,med,far分別表示距離近、距離適中和距離遠;NB,NS,ZO,PS,PB表示向左急轉、向左轉、不轉、向右轉、向右急轉。di和Ψ的隸屬函數均采用三角形函數,如圖7所示。
根據人類避障的經驗,設計針對圓柱形障礙物的模糊避障控制規則(見表1),并采用最大隸屬度法對輸出量進行清晰化處理。
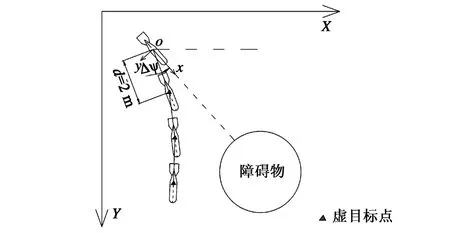
圖5 避障過程示意Fig.5 Sketchmap of obstacle-avoiding behavior
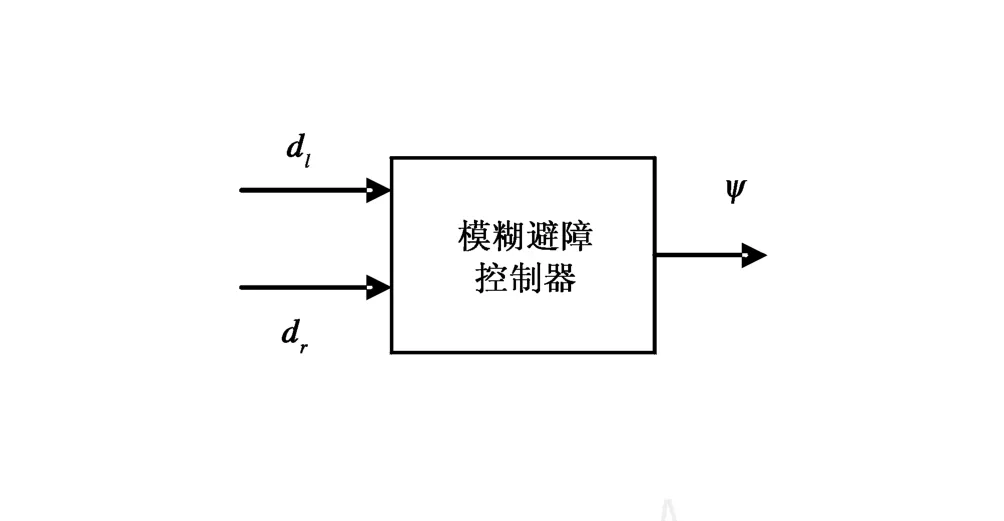
圖6 模糊避障控制器Fig.6 Fuzzy logic controller
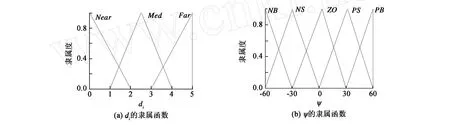
圖7di和Ψ的隸屬函數Fig.7 Member function fordiandΨ
避障的原則是往沒有障礙物或障礙物距離更遠的一側轉向,當兩側障礙物距離相等時,默認向右轉。轉向的程度與最近的障礙物距離相關,與障礙物的距離越近,轉向角度越大,反之越小。行為輸出為eavoid=[Avoidactiveexavoideyavoid
ezavoideΨavoid],顯然有下列關系:

于是,只要得到了Ψ就可以得到避障行為的輸出指令。AUV避障過程:當視野前方沒有障礙物時,AUV執行巡航行為,趨向目標點;當前方出現障礙物并且危及到自身安全時,避障行為被激活,AUV向遠離障礙物的方向運動,當前方沒有障礙物時,巡航行為再次被激活。AUV就是通過這兩種行為間的反復切換來實現避障和到達目標的雙重目的。
3 控制策略仿真與分析
為了驗證控制策略的有效性,進行了AUV全系統的Simulink仿真。其中AUV動力學模型是依據試驗平臺“MM-01”的參數建立的狀態方程模型 ,模型的狀態量為u、v、w、q、r、θ、Ψ、ξ、η、ζ,即 AUV 的運動(角)速度和在絕對坐標系中的位置和姿態(除橫傾和橫傾角速度外)。
3.1 漫游行為
設定AUV的初始狀態為u=0.514 4m/s,v=w=0,q=r=0,在原點出發,目標點PG=(5,5)。仿真時間t=200 s,假設在時間t=5 s至t=30 s內,AUV失去了位置導航信息,而在t=30 s以后又重新獲得該信息。運動軌跡如圖8所示。可見,當失去導航信息時AUV進行了大范圍回轉的漫游,在獲得導航信息后重新駛向目標點,最終在PG實現了懸停。
3.2 巡航行為
設定子目標點序列為:P1=(5,5,0),P2=(10,5,0),P3=(10,5,5),P4=(15,10,5),P5=(20,10,5),P6=(25,15,5),初始狀態與漫游行為中的設置相同,仿真時間t=1 500 s。
仿真結果如圖9~11所示,其中圖9為三維運動軌跡,圖10~11分別為其頂視圖和側視圖。可見,AUV可靠地完成了定深航行和垂直潛浮的動作,準確地遍歷了6個目標點,最終在終點實現了穩定的懸停,這與我們的設計思想是吻合的。
3.3 避障行為
研究水平面內的避障,通過避障和簡化的巡航行為結合實現避障目的。設定目標點PG=(20,0),初始狀態與漫游行為中的設置相同。設置圓柱形障礙物,圓心O=(10,0),分別設半徑R=0.5、1、2 m,以演示控制策略在面對大小不同的障礙物時的避障能力。
仿真結果如圖12所示。AUV成功地避開了R=1m和R=2m的圓形障礙物,卻撞上了R=0.5m的障礙物,這是由于兩側激光器之間的距離相對較大,無法較好地識別體積較小的障礙物,該問題可以通過在AUV頭部中央加裝激光器加以解決。AUV躲過障礙物后,都重新規劃航線,最終順利地到達了預定的目標點PG。
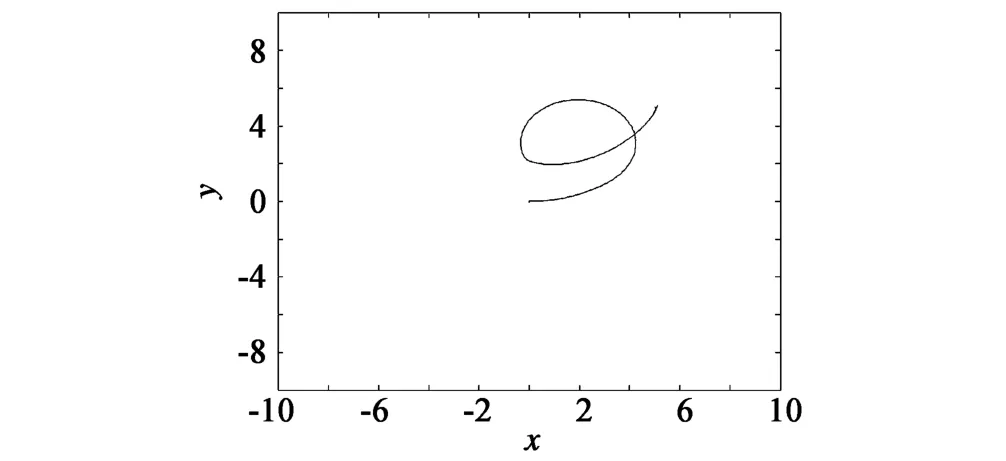
圖8 漫游行為的運動軌跡Fig.8 Moving trajectory of wander behavior
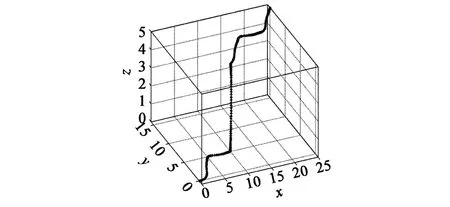
圖9 巡航行為的三維運動軌跡Fig.9 3D moving trajectory of cruise behavior
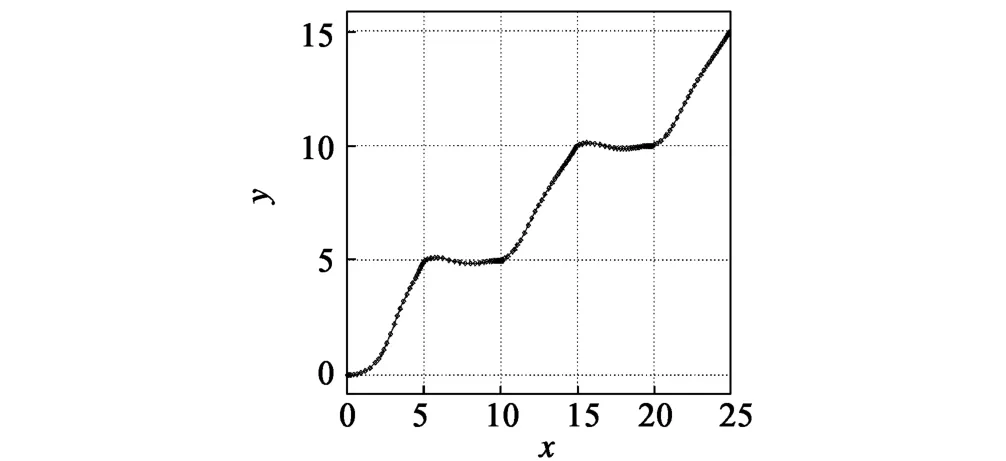
圖10 頂視圖(XY)Fig.10 Top view
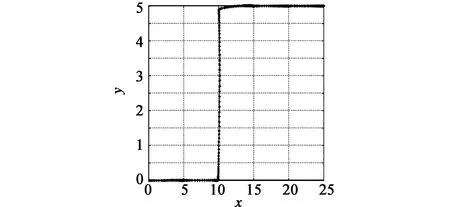
圖11 側視圖(XZ)Fig.11 Lateral view
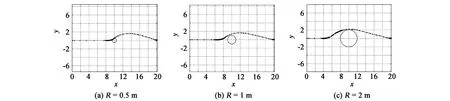
圖12 避障軌跡Fig.12 Moving trajectory of obstacle-avoiding behavior
3.4 多行為仿真
設定AUV的初始狀態與前述設置相同,子目標點序列:P1=(5,5,0),P2=(10,5,0),P3=(10,5,5),P4=(15,10,5),P5=(25,10,5),P6=(30,15,5),在前進的必經路徑上設置圓柱形障礙物,圓心O=(22,10),半徑R=1 m,高度h=6 m。假設在時間t=5 s至t=30 s內,AUV失去了位置導航信息,在t=30 s以后又重新獲得該信息。仿真結果如圖13~14所示。
可見,在行為仲裁器的有序協調下,AUV完成了大范圍回轉和軌跡點遍歷,并成功地躲過了障礙物,最終順利到達航行任務的終點,并完成了穩定的懸停。結果有力地證明了控制策略的有效性。
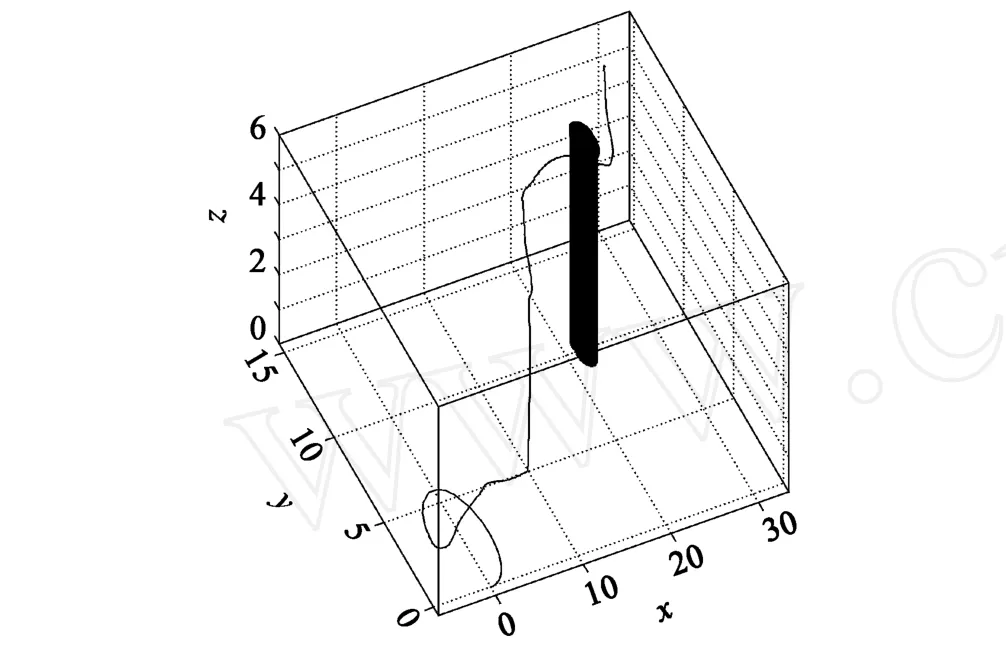
圖13 多行為結合的三維運動軌跡Fig.13 3D moving trajectory ofmultiple behaviors
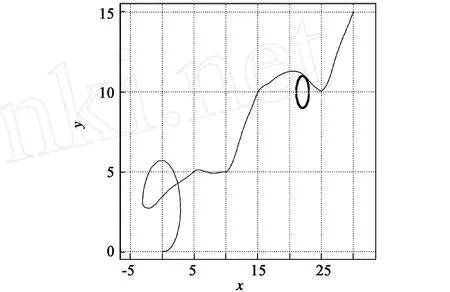
圖14 運動軌跡頂視圖(XY)Fig.14 Top view
4 結 語
主要討論了實現AUV的懸停、大范圍回轉漫游、三維空間內的軌跡點遍歷和自主避障的控制方法。仿真結果驗證了基于行為的控制結構應用于AUV控制的有效性,同時也表明內環反饋在AUV的懸停控制中具有關鍵意義。提出的懸停運動及自治控制策略對懸停式AUV今后的研究開發具有重要的啟示作用,可以應用于工程實際。
[1] Tamaki Ura.History of R&D and deploymentsof AUVs constructed at ura laboratory during 1984-2009[R].Shanghai:Shanghai Jiao Tong Univesity,2009.
[2] 郝穎明,吳清瀟,周 船,等.基于單目視覺的水下機器人懸停定位技術與實現[J].機器人,2006,28(6):656-661.
[3] Cuf X,Garcia R,Ridao P.An approach to vision-based station keeping for an unmanned underwater vehicle[C]∥Proceedingsof the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems.2002:799-804.
[4] Doucy O,Brutzman D,Healey A.Near surfacemanoeuvring and station-keeping for an autonomous underwater vehicle[C]∥NATO Symposium.2000.
[5] 石辛民,郝整清.模糊控制及其Matlab仿真[M].北京:清華大學出版社,北京交通大學出版社,2008:89-113.
Research on control strategy of a hovering-type AUV
LIWen-tao,GE Tong
(State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200030,China)
TP242.6
A
1005-9865(2011)01-0075-07
2010-04-12
上海交通大學海洋工程國家重點實驗室自主研究課題資助項目
李文濤(1986-),男,山東泰安人,碩士生,主要從事水下機器人的運動控制方面的研究。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
