基于新一代Argos衛星系統的表面漂流浮標設計
2011-09-24 03:27:02李文彬張少永商紅梅鄔海強
海洋技術學報 2011年1期
關鍵詞:測量
李文彬,張少永,商紅梅,鄔海強
(國家海洋技術中心,天津 300112)
基于新一代Argos衛星系統的表面漂流浮標設計
李文彬,張少永,商紅梅,鄔海強
(國家海洋技術中心,天津 300112)
介紹了改進的表面漂流浮標的功能、組成和設計過程。該浮標加裝了Argos衛星收發器和GPS模塊,相比目前的表面漂流浮標,該浮標具有數據傳輸有效性高,功耗低,采集數據量大,可雙向通信等特點。浮標在布放后可通過網絡申請對浮標參數進行設置,再由衛星將設置參數發送給浮標;浮標利用GPS模塊對其直接定位,且定位精度顯著提高。浮標測量的數據可服務于水產養殖、環境保護和生態治理、氣象和海洋監測預報、軍事監測等多個領域。
表面漂流浮標;PMT;數據傳輸
近十幾年來,隨著衛星跟蹤觀測技術的發展,越來越多的衛星跟蹤浮標 (主要有表面漂流浮標及ARGO剖面浮標)被用來觀測海流。Argos系統是在衛星跟蹤浮標中應用十分廣泛的衛星系統。Argos系統中衛星發射平臺將各種傳感器測量環境要素按照一定格式向上發射給衛星。衛星接收到衛星收發器的信號,一方面從經過調制的載波中提取出測量數據,另一方面根據定位計算的需要測量載波本身的多普勒頻率偏移值,然后把這兩類數據向下轉發給地面各種接收站。地面站接收到數據后先進行初步處理,再轉送到數據處理中心進行最后處理,形成文件,并通過各種途徑把結果分發給用戶。
表面漂流浮標是一種隨流漂移、利用Argos衛星系統定位、具有數據實時傳輸功能的海洋儀器,浮標裝載溫度傳感器來獲取表層水溫,用拉格朗日法大尺度測量表層流速和跟蹤海流走向,并由此分析觀測海域海流及水體表層溫度的分布特征,進一步認識和了解觀測海域的表層海流及其流路等。然而在實際應用中由于天氣、海況等因素,如果Argos衛星接收到由漂流浮標發送的數據次數較少(少于4條),就導致其無法計算出浮標的準確定位。由于沒有浮標的定位信息,搭載Argo的衛星發射器(PTT)的浮標所采集的數據也就無效。由于Argos衛星發射器是單向通信,無法得知衛星過頂時間,只有按照一定的時間間隔不間斷的發送浮標采集的數據。當沒有衛星過頂時,衛星就接收不到Argos衛星發射器發送的數據,增加了整個系統的功耗,減少了浮標的工作壽命。
新一代的Argos衛星收發器(PMT)具有雙向通信、衛星過頂時間可預測、大容量數據存儲和較高的數據上傳速率等特點。本文研究的主要目的是根據衛星收發器的特點,將其應用在表面漂流浮標上,當衛星過頂時,衛星收發器發射浮標搭載傳感器采集到的數據;當衛星離開后,衛星收發器停止發射以減少系統功耗,延長漂流浮標工作壽命;同時,在浮標上搭載GPS模塊,對于每次測量點的位置信息都可以通過GPS模塊獲得,保證每次測量數據的有效性。
在2006年,法國發射第一顆Argos-3衛星(METOP A),在2009年發射第二顆Argos-3衛星,并在未來幾年還要發送2~3顆Argos-3衛星。而表面漂流浮標搭載的衛星通信系統基本是第二代Argo衛星系統的衛星發射器(PTT)。目前,我國生產的漂流浮標還沒有搭載可雙向通信的衛星收發器,并且在其他觀測浮標也沒有搭載這種衛星收發器。而雙向通信的衛星收發器的應用是將來衛星通信系統的趨勢。
1 表面漂流浮標設計
1.1 表面漂流浮標系統組成
系統在水面漂流時,主要受到海流、波浪和風的作用。由于浮標既要用拉格朗日法測流,又要獲取海表面其它參數數據,因此在總體結構設計上,既要保證浮標具有很好的隨流性,又要滿足其它傳感器測量對安裝位置的要求。浮標結構主要由標體和水帆組成,如圖1所示,其中浮標標體為圓柱形密封殼體,由上端蓋和下端蓋組成。殼體材料選用非金屬材料,各處連接采用O形圈密封。殼體直徑約140 mm,高約800 mm(不含天線),耐壓和密封性能達0.1 MPa。標體內部裝有控制模塊、通訊模塊、GPS模塊和電池組。水帆呈“十”字交叉狀,與標體上下端蓋連接,可拆卸。水帆的作用是使整個浮標有良好的隨流性,提高海流測量和海流跟蹤的準確性。同時浮標重量、浮力的配置安裝盡可能使浮標露出水面部分很小。
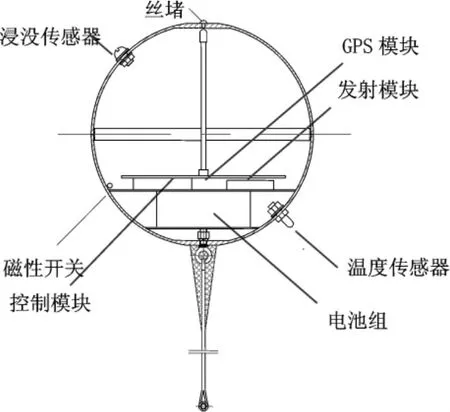
圖1 表面漂流浮標結構圖
浮標總體設計:總高約1.6 m;水帆展開尺寸1140 mm×800 mm。
總體積約22.4 L;排水體積約18.7 L;重心高度約458 mm;穩心高度525 mm。
浮標橫搖固有周期為2.5 s,在5級海況下,波浪作用下最大橫搖角為11.2°。
浮標縱蕩運動激發力只有波浪力,浮標自由縱蕩運動固有周期為1.49 s,5級海況下,最大振蕩幅值約為300 mm。
表面漂流浮標主要由電源系統、溫度傳感器、浸沒傳感器、數據采集處理電路、Argos通訊電路、GPS模塊、天線等組成。
1.2 表面漂流浮標的主要功能
該浮標功能:浮標布放后按照預定采樣間隔采集溫度數據和位置信息,通過接口將測量數據發送給衛星收發器,衛星收發器對數據進行暫存,當Argos衛星過頂時,衛星收發器自動向衛星發射數據。該衛星收發器發射周期的缺省值為90 s,用戶可通過衛星對衛星收發器的發射周期修改,其發射周期可在30~255 s之間選擇,當浮標進入重點海域后,用戶可通過衛星向浮標發送命令減少浮標工作間隔,增加對該海域的觀測密度;該浮標還可將每20次測量數據作為一個數據包寫入衛星收發器,當Argos-3衛星經過時,利用衛星收發器的高速模式將該數據包發送,確保測量的數據不丟失;該浮標發送的數據中包括浮標的位置信息,可將浮標的數據加密后發出,同時將Argos衛星中心計算的位置信息屏蔽,保證數據的保密性。相對于原先漂流浮標僅返回衛星經過時浮標測量的溫度數據,這種加裝GPS的漂流浮標可以將每個測量點的溫度數據通過衛星發回,其測量密度大大增加,且真實的反映海流的流向。
1.3 Argos系統衛星收發器
Argos衛星收發器如圖2所示,其主要指標:
上傳頻率:401.65 MHz;
下載頻率:465.987 5 MHz;
調制方式:相位調制;
位速率:4 800 bps,9 600 bps;
電源:DC,5.5~14 V;
靜態電流:90 μA;
發射功率:1~5 W。
根據不同的需要,Argos衛星發射平臺可以組裝成各種不同的形式,例如可以安裝在浮標等各種平臺上進行數據采集、傳輸,可以安裝在動物身體上進行動物的遷徙跟蹤等。
1.4 GPS模塊
本浮標選用美國GARMIN的12通道GPS接收機,如圖3所示。該產品的主要指標:
(1) 電氣指標
輸入電壓:DC,4~5.8 V;輸入電流:140 mA(峰值);接收機靈敏度:-165 dBW(最小)
(2) 技術指標
通道數:12;冷啟動:45 s;定位時間:5 min(最長);更新率:1 s;定位精度:≤15 m(95%)
(3) 物理指標
尺寸:46.48 mm×69.85 mm×11.43 mm;重量:38 g
(4) 環境指標
工作溫度:-30~80 ℃;存貯溫度:-40~90 ℃

圖2 衛星收發器
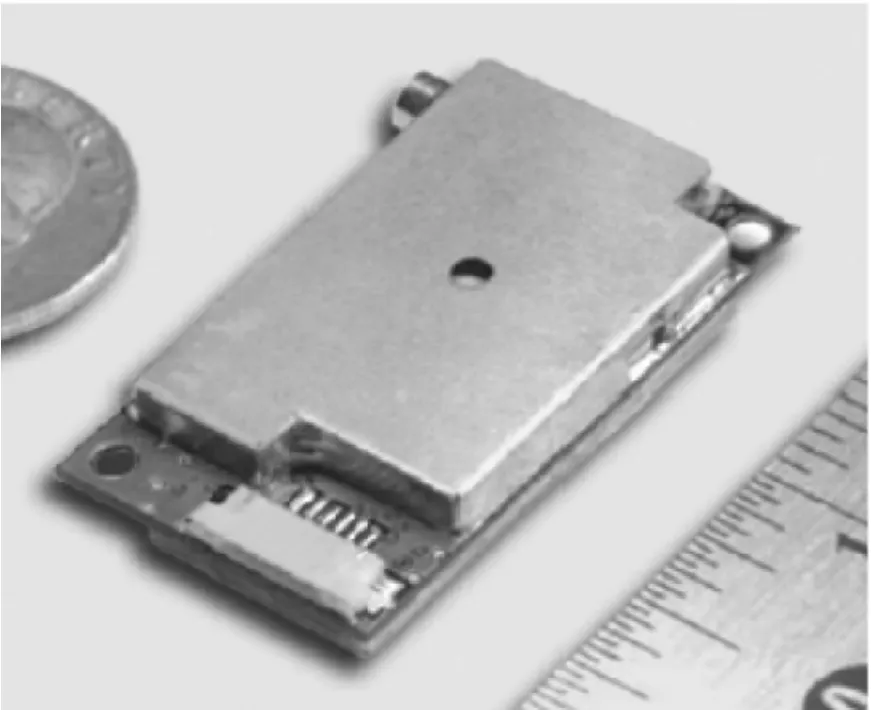
圖3 GPS接收機
2 數據采集控制電路設計
數據采集控制電路的功能是按照預定的時間間隔對海區進行實時數據采集并存儲采集的數據;控制GPS模塊,并通過GPS模塊獲得浮標的即時位置信息;將傳感器采集的數據和定位數據寫入衛星收發器,控制衛星收發器工作,通過衛星將采集的數據返回到地面用戶進行處理;處理衛星收發器接收的下載命令,根據下載命令改變浮標的工作參數。
2.1 浮標電路硬件設計
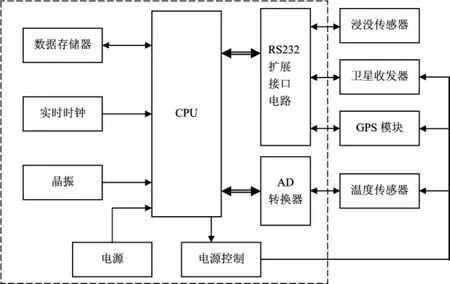
圖4 浮標電路框圖
該數據采集控制電路以美國微芯(Microchip Technology)公司8位單片機PIC16F877為核心,帶有電源變換、實時時鐘、外部串行EEPROM數據存貯器、外部A/D、串行異步通訊接口等外圍電路。
為了保證整機的長時間可靠運行,要求數據采集控制電路進行耐低溫和低功耗設計,主要采取了以下措施:
(1)選用耐低溫的低功耗PIC16F877單片機。PIC16F877單片機的特點是采用14位的精簡指令集(RISC)、低功耗、高速度、體積小、功能強、耐低溫。并且此型號的單片機內部帶有EERPROM存貯器、A/D轉換器、I2C接口、異步串行通訊(USART)接口、FLASH程序存貯器等。
目前該單片機開發工具除了微芯公司的匯編語言開發環境外,還有第3方提供的HI_TECH PICC C語言開發環境。
(2)外圍電路關鍵件選用軍品級或工業品級器件,并進行篩選和測試。
(3)整機電路板進行環境試驗,保證在-10~50℃仍正常工作。
(4)浮標體內電路板盡可能安裝于浮標底部。當浮標布放后,電路板所處位置基本處于海水溫度范圍,避免氣溫劇烈變化影響電路正常工作。
2.2 浮標軟件設計
該浮標軟件設計主要考慮數據控制采集電路板對PMT的控制,浮標按照設定時間間隔采集數據,數據控制采集電路將每次采集的時間信息、溫度數據和浮標的位置信息存儲在數據存儲器中,同時將其寫入PMT。當衛星過頂時,PMT將數據通過衛星返回到用戶。同時為防止數據在傳輸過程中丟失,將每20次測量的數據作為高速率數據包寫入PMT中,當Argos-3衛星經過時,將該數據包發送出去,以保證數據傳輸的可靠性。在軟件設計中,程序考慮了以下措施:
(1)硬件和軟件設計中采用看門狗措施,在軟件中有抗干擾自復位功能,防止外部強干擾造成的死機。
(2)數據傳輸中加入CRC校驗,保證數據傳輸可靠性和真實性。
(3)用戶向PMT傳送具有一定格式的下載命令,防止對PMT誤操作。
浮標的主要工作流程如圖5所示:
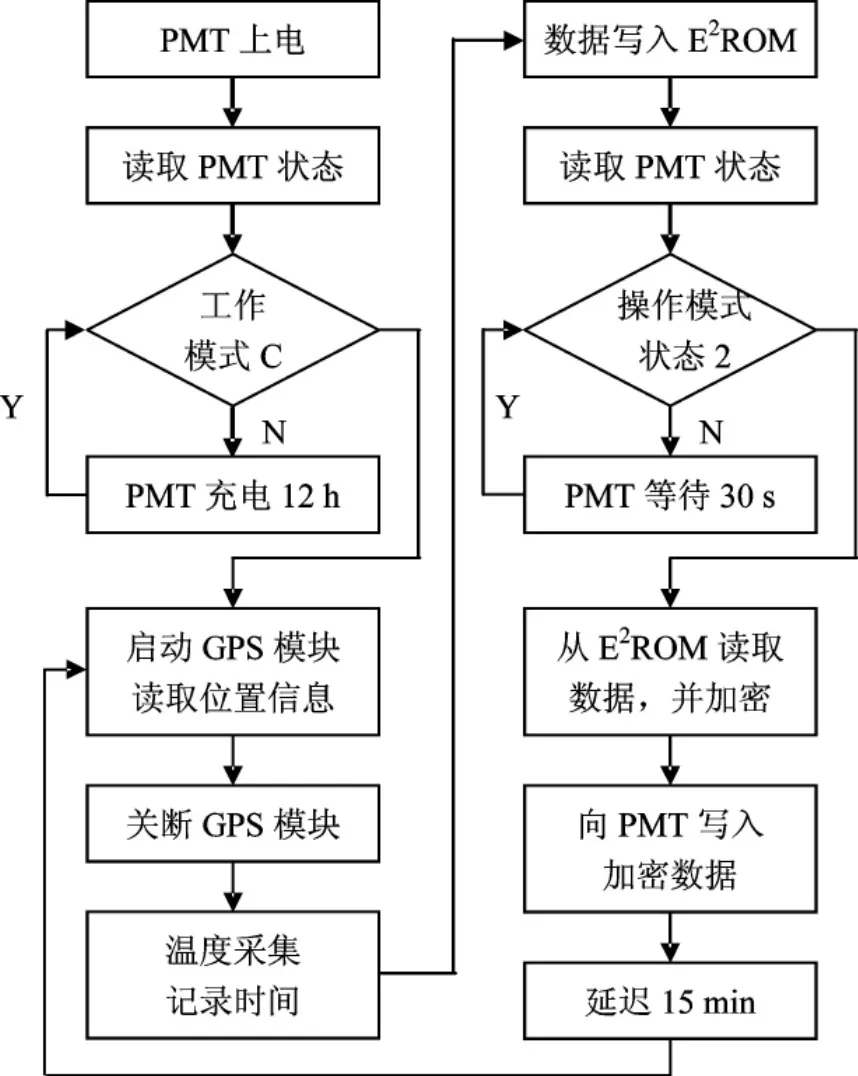
圖5 浮標程序框圖
3 試驗情況
經過整機拷機試驗,浮標用電按15 min工作1次,每次工作1 min,在電池14.4 V供電情況下,浮標的靜態工作電流約為10 mA;GPS工作電流約為90 mA,每次工作40 s;PMT發射電流約為350 mA。每次工作約1 s,間隔為45 s,每天發射數據約700次;系統工作時平均耗電72 mA,按壽命600 d計算,可得總耗電為:

選用高容量、具有大電流輸出能力、小體積的ER34615鋰電池(單節3.6 V,12 Ah)作為浮標電源。采用4節電池串聯成組,考慮電源冗余,7組并聯的形式,共計電量 12×7=84 Ah。
通過改進浮標數據采集和傳輸方式,提高數據壓縮率,選擇合適的發射周期和采樣間隔,浮標將每條數據重發5次,并將每20次采集的數據作為高速率數據包寫入PMT中,當Argos-3衛星通過時,PMT可以將高速率數據包發射出去。
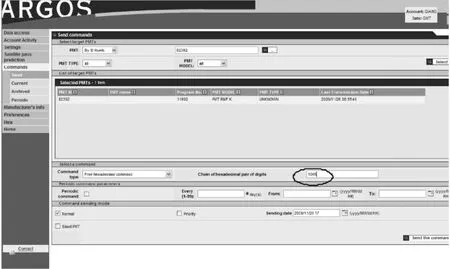
圖6 用戶對PMT操作界面
用戶可通過Argos數據中心的網站向PMT發射命令,PMT將下載命令傳給主控電路,主控電路根據命令改變浮標的工作參數。如圖6所示,用戶向浮標發射字符串:1045,其中10為該命令的字頭,45為浮標每次采樣的工作間隔,浮標每45 min采集1次數據;用戶也可向PMT發射命令改變PMT的發射數據的間隔。
根據浮標數據通信效果,通過計算和陸地連續拷機測試,數據傳輸有效率到達90%以上。
4 結論
(1)保證數據傳輸的有效性:通過設置合適的浮標采樣間隔和發射周期,并采用PMT可發射高速數據包的功能,確保采集數據傳輸的有效性。
(2)降低浮標的功耗:由于浮標上搭載的衛星收發器具有過頂可預測的功能,浮標只有衛星過頂時才會發射數據,其發射數據的功耗可大大降低。
(3)提高位置精度:加裝GPS的漂流浮標測量點的位置精度大大提高。其浮標位置的誤差范圍由原來的1 000 m減小到30 m,通信費用不會因位置精度的提高而增加,而保持其費用不變。
(4)增加浮標測量點:該浮標可將每次測量的數據傳回,而不是傳回僅在衛星通過時測量的數據,獲得的數據量大大增加。
(5)浮標具有雙向通信的功能,用戶可在浮標布放后修改在位浮標的工作參數,如浮標的采樣間隔、數據的發射周期等,以實現對不同海域的觀測方式。
[1]M Guigue.PMT RFM-YTR-3000 USER MANUAL.2010.
[2]商紅梅.使用Argos衛星系統對Argo浮標進行定位和數據傳輸[J].海洋技術,2001,20(3):41-43.
[3]余立中,山廣林.表層漂流浮標及其跟蹤技術[J].海洋技術,1997,16(2):1-11.
[4]吳少軍,劉光斌.實用低功耗設計-原理、器件與應用[M].北京:人民郵電出版社,2002.
[5]求是科技編著.PIC單片機典型模塊設計實例導航[M].北京:人民郵電出版社,2005.
[6]http://www.argos-system.com
Abstract:The function,component and design process of the improved surface drifting buoy are introduced.The platform message transceiver and GPS are mounted in the buoy.Compared to current surface drifting buoy,the improved buoy has the characteristics of large data transmission,low power consumption,large data collection and transmission in dual-way etc.The parameter of deployed buoy can be set through the web and sent to the buoy through the satellite in delayed time.Meanwhile,the buoy could be located through the GPS module and the precision of the buoy position can be appropriately improved.The application includes agriculture,environment protection,ecological treatment,meteorology and ocean monitoring and forecast and military measurement etc.
Key words:surface drifting buoy;PMT;data transmission
Design of Surface Drifting Buoy Based on Argos Satellite System
LI Wen-bin,ZHANG Shao-yong,SHANG Hong-mei,WU Hai-qiang
(National Ocean Technology Center,Tianjin 300112,China)
P715.2
A
1003-2029(2011)01-0001-05
2010-08-03
國家海洋局海洋溢油鑒別與損害評估技術重點實驗室2010年度開放基金項目(201001)
李文彬(1982-),男,山西人,碩士生;研究方向:海洋觀測技術。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00