基于單片機的聲音導引自動定位系統設計
2011-09-22 06:32:42艾青楠金成宰宋海波
大連民族大學學報 2011年1期
艾青楠,金成宰,宋海波
(大連民族學院創新教育中心學生,遼寧 大連 116605)
基于單片機的聲音導引自動定位系統設計
艾青楠,金成宰,宋海波
(大連民族學院創新教育中心學生,遼寧 大連 116605)
1 理論算法分析
距離遠的接收器一定比距離近的接收器后接收到信號[1]。如圖 1中當移動小車聲源從 OX線右側開始運動后,實時判斷A、B兩點接收到的音頻脈沖信號的時間差,當時間差為零時,說明聲源到 A、B兩點的距離相同。同理可以利用接收器A、C實現移動聲源離目標 Y方向的位置。
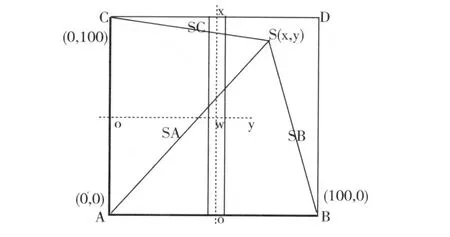
圖1 系統示意圖
2 系統的軟硬件設計
系統硬件結構如圖 2,其中電機控制采用NEC公司的ASSP芯片,電機驅動采用兩片 MC33886芯片實現,采用PWM技術控制;聲音接收器利用 SPCE061A中集成的音頻輸入專用ADC以及AGC放大電路,移動小車聲源利用SPCE061A內置的DAC和外接的功放實現脈沖音頻信號輸出;無線數據傳輸模塊利用 RF2401B實現移動小車聲源與接收器之間的數據傳輸[2]。移動小車聲源及接收端程序流程圖如圖 3。
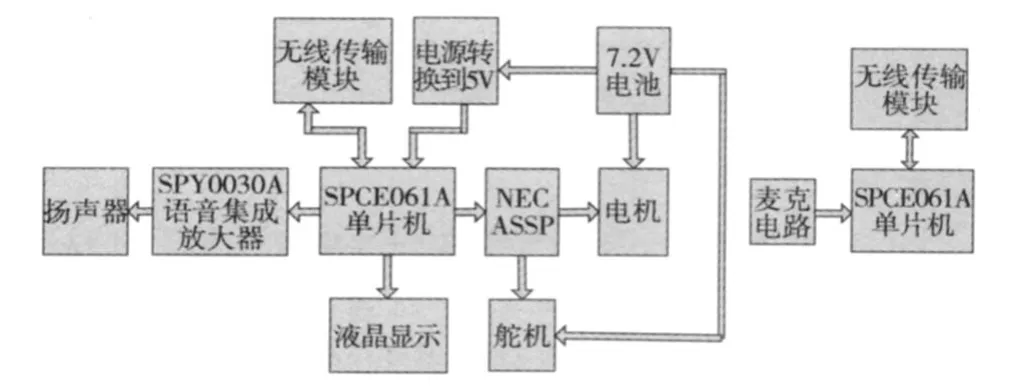
圖2 硬件系統方框圖
3 實驗測試
當移動聲源到達OX軸后停留 8 s再轉向到達W點,對啟動點到W點的距離和響應時間進行測試,結果見表1。測量平均定位誤差為 2.10 cm,速度可以達到 10 cm·s-1。
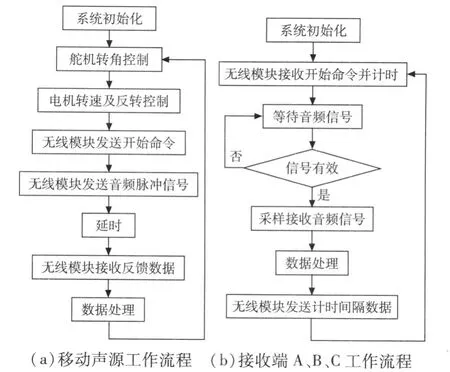
圖3 軟件程序流程圖
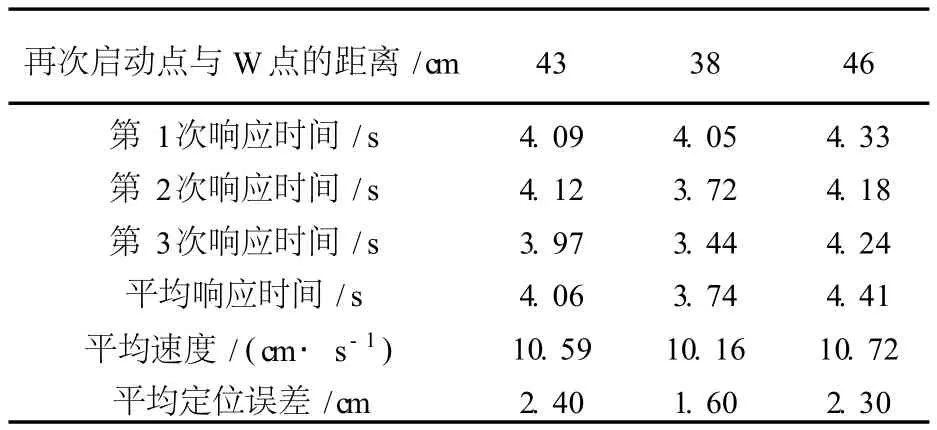
表1 再次啟動到達W點的響應時間
系統利用無線通信技術和凌陽單片機語音處理技術實現了移動聲源與接收端之間的數據傳送和采集和處理,可實現移動聲源的自動定位功能,系統滿足定位誤差、定位速度等要求。
[1]韋作凱,杜秋,臧曉明,等.基于單片機實現觸摸屏的實時數據采集[J].大連民族學院學報.2008,10(5):479.
[2]彭傳正,林春景.凌陽單片機原理與實踐[M].北京:北京航空航天大學出版社,2006
(責任編輯 劉敏)
TN 919 < class="emphasis_bold">文獻標志碼:A
A
1009-315X(2011)01-0093-01
2010-04- 13;
2010-10-11
指導教師:陳興文 (1969-),男,遼寧錦州人,教授,主要從事計算機控制及教學管理研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中等數學(2022年2期)2022-06-05 07:10:50
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
