基于VRML的陀螺羅經仿真
2011-09-07 10:10:12李紅祥
武漢船舶職業技術學院學報 2011年4期
方 遜 李紅祥 李 昊
(1.武漢理工大學航運學院,湖北武漢 430063;2.武漢船舶職業技術學院,湖北武漢 430050)
虛擬現實建模語言(Virtual Reality Modeling Language,VRML)是第二代WWW 的標準語言,用來在網絡上創建逼真的三維虛擬場景,實現了3D的動畫效果,改變了當前網絡與用戶交互的局限性,使得人機交互更加方便、靈活,使虛擬世界的真實性、交互性和動態性得到了充分的體現[1]。VRML還提供了一個Script腳本節點,通過該節點可以實現復雜交互和邏輯控制等功能[1~2]。
陀螺羅經在提供船舶航向中占非常重要的地位,其結構復雜,傳統教學只是停留在對平面圖形的演示和說明,這成為了航海專業的學生學習陀螺羅經的瓶頸。本文以阿瑪-勃朗MK10型陀螺羅經為例,利用VRML的各種造型節點進行陀螺羅經主要部分三維結構的仿真,使用VRMLScript語言實現了靈敏部分、隨動部分和主軸指北過程的交互式仿真。
1 靈敏部分的交互式仿真
靈敏部分由陀螺球、浮動平衡環和金屬扭絲等組成。靈敏部分的仿真可以使學習者更易于了解陀螺儀的3自由度結構及電磁控制力矩的產生方法。
1.1 結構的三維仿真設計
陀螺馬達高速旋轉的自轉軸是陀螺球的主軸,在水平方向上與主軸相垂直的水平扭絲是陀螺球的水平軸,在垂直方向上與主軸相垂直的垂直扭絲是陀螺球的垂直軸,三軸相交于陀螺球的中心[3]。由于陀螺球、浮動平衡環和水平垂直扭絲均為對稱平衡,并且靈敏部分的重心與陀螺球的中心相重合,因此靈敏部分是一個3自由度的平衡陀螺儀。結合VRML語言的特點,設計了靈敏部分仿真結構示意圖,如圖1所示。
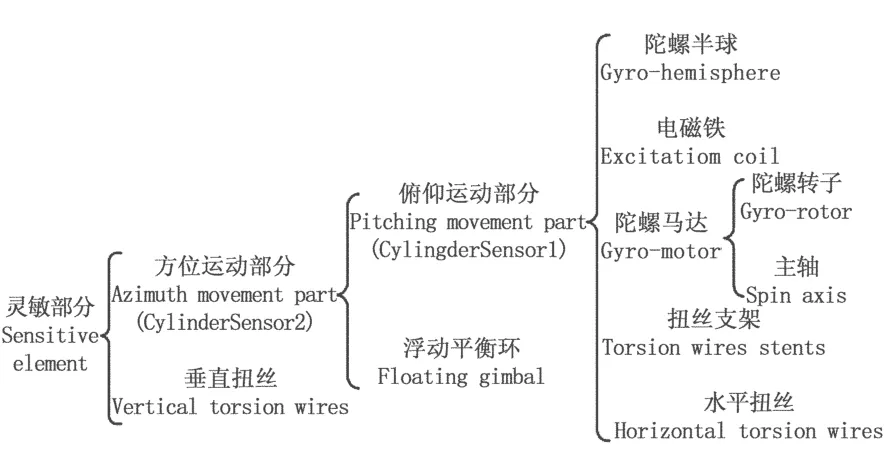
圖1 靈敏部分結構圖
基于該結構圖編寫相應的程序代碼,實現的三維結構仿真圖如圖2所示。在程序中,調整陀螺球材質的透明度域值,可以使陀螺球實物中不可見的陀螺轉子被清晰地看到[4]。
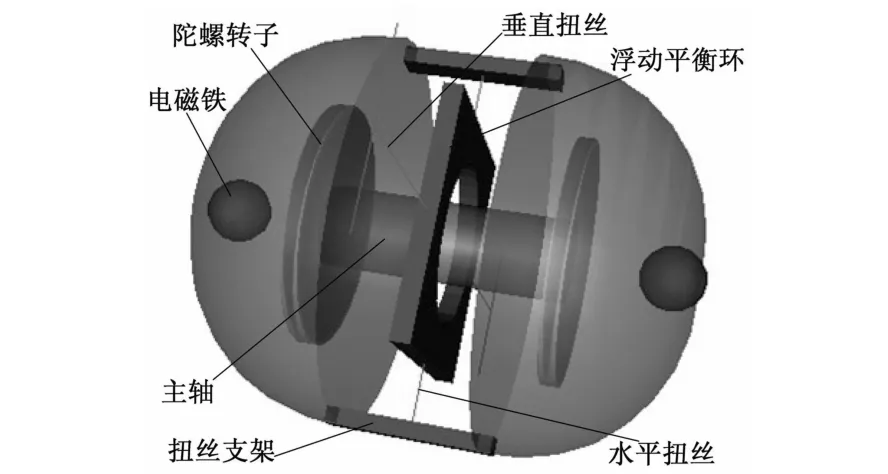
圖2 靈敏部分仿真圖
1.2 靈敏部分的交互式仿真
通過鼠標或者按鈕控制實現陀螺球繞水平軸作俯仰運動、水平扭絲受扭、產生作用于陀螺球水平軸的電磁控制力矩的交互過程,以及陀螺球繞垂直軸做方位運動、垂直扭絲受扭、產生作用在陀螺球垂直軸上的電磁阻尼力矩的交互過程。學習者既可以了解陀螺球的3自由度結構,又可以理解阿瑪-勃朗陀螺羅經兩個力矩產生的方法。
利用圖1中的圓柱傳感器CylinderSensor1和CylinderSensor2,便可以實現以鼠標控制陀螺球作俯仰和方位運動的效果。通過語句
ROUTE stents.rotation_changed TO Pitching.rotation
實現用鼠標驅動扭絲支架使陀螺球作俯仰運動
ROUTE floating.rotation_changed TO Azimuth.rotation
可實現用鼠標驅動浮動平衡環使陀螺球作方位運動,再加上陀螺轉子的自轉運動就實現了陀螺球的3自由度交互式仿真。
陀螺球作俯仰運動和方位運動的同時,金屬扭絲受扭產生力矩,通過水平扭絲和垂直扭絲顏色的變化來仿真該過程。在Script節點中應用函數
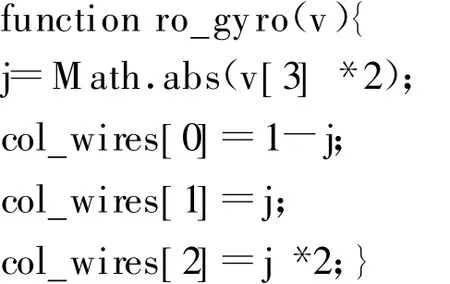
將陀螺球轉動的角度值v轉化為扭絲的顏色值col_wires,通過語句
ROUTE Azimuth.rotation_changed TO scrip.ro_gyro
將陀螺球作方位運動時的角度值傳遞給函數ro_gyro(v),可以獲得轉換后的顏色值,利用語句
ROUTE scrip.col_wires TO ap_wires.set_emissiveColor
將獲得的顏色值傳遞給垂直扭絲,從而產生了垂直扭絲顏色隨著陀螺球方位轉動角度的變化而變化的效果,亦即實現了垂直力矩產生過程的仿真。
2 隨動部分的交互式仿真
隨動部分中,由貯液缸、傾斜平衡環、傾斜齒輪、傾斜隨動電機組成傾斜隨動系統;由方位平衡環、方位齒輪、方位隨動電機和方位刻度盤組成方位隨動系統,可以實現貯液缸在高度和方位上跟隨陀螺球運動,亦即貯液缸模擬陀螺球運動。隨動部分的仿真能使學習者對陀螺羅經隨動系統的概念有一個清晰的理解。
2.1 結構仿真
隨動部分中,貯液缸的南北兩端通過軸承支承在水平放置的傾斜平衡環內,傾斜平衡環通過軸承支承在方位平衡環內,形成貯液缸的東西水平軸。傾斜電機旋轉時傾斜平衡環連同貯液缸一起可繞此東西水平軸作俯仰運動;方位平衡環通過垂直樞軸支承在固定部分的驅動平板上,形成貯液缸的垂直軸,方位電機旋轉時方位平衡環可以帶動傾斜平衡環及貯液缸一起繞此垂直軸作方位運動。使用VRML語言可以設計隨動部分仿真結構示意圖,如圖3所示。
傾斜平衡環、方位平衡環和刻度盤等環型體的設計都通過擠出面(Extrusion)節點來實現,其中crossSection域確定了環的截面,spine域是一個圓形的擠壓脊線,將截面沿圓形擠壓脊線運動從而形成一個環。以刻度盤為例,
crossSection[20,00,00.5,0.750.5,0.751,11,10.5,20.5,20,]表示刻度盤的截面形狀;
spine[600,
5.9963486666962 7.2092908679563410,
5.9853991108633 6.4183270056739030,
5.9671646593272 4.6268539929489080,
……]表示擠壓脊線,該擠壓脊線是由360個坐標點構成的一個圓。
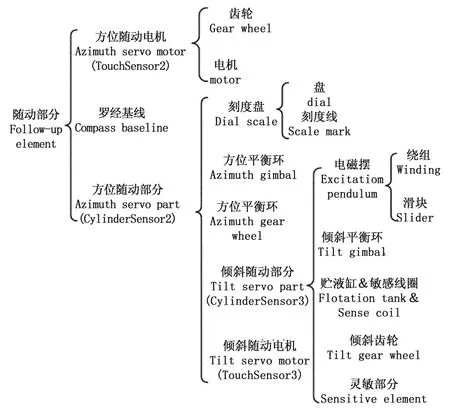
圖3 隨動部分結構圖
刻度盤的刻度線由索引線集(IndexdLine-Set)節點實現,通過計算出刻度線兩端點的坐標值,并將其放入索引線集節點的Point域,就可以做出相應的刻度線。
齒輪的設計由圓柱體(Cylinder)節點實現,通過設置不同的scale域值就可設計出不同形狀的齒[5]。最終形成的隨動部分仿真效果圖如圖4所示。
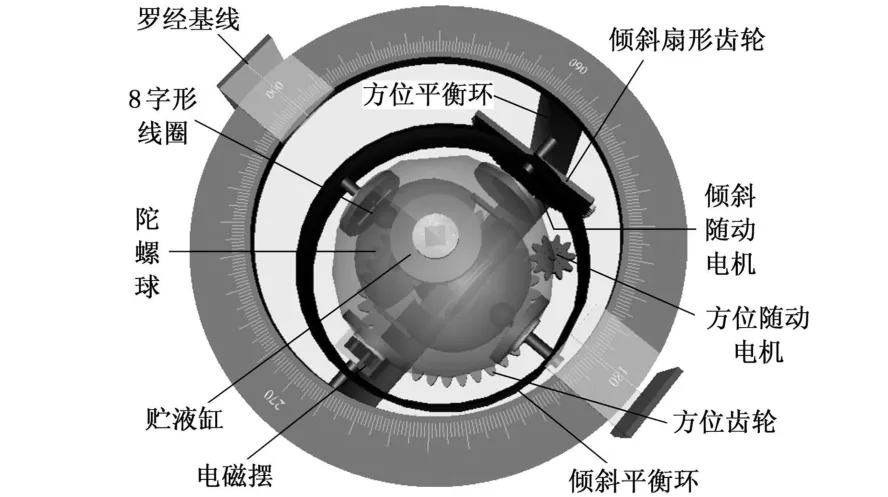
圖4 隨動部分仿真圖
在傾斜隨動系統中,傾斜電機轉動時,通過齒輪傳動裝置和傾斜扇形齒輪,帶動傾斜平衡環與貯液缸一起繞東西水平軸作傾斜轉動。具體實現方法是:在script節點中利用函數[6]
將傾斜電機轉動的角度值ro轉化為傾斜齒輪轉動的角度值out_T motor[],再利用鼠標控制傳感器TouchSensor1使電機轉動,將轉動角度通過語句
ROUTE Tmotor.rotation_changedTO scrip3.in_Tmotor傳輸給傾斜電機,即傳給傾斜齒輪,然后通過語句
ROUTE scrip.out_T motor TO Tilt.rotation
將傾斜齒輪的轉動角度傳輸給傾斜平衡環,使傾斜平衡環帶動貯液缸轉動,從而實現貯液缸作俯仰運動。
從圖3中可看出,傾斜隨動系統(Tilt servo part)包含在方位隨動系統(Azimuth servo part)中。當方位電機轉動時,通過齒輪傳動裝置和方位齒輪,帶動方位平衡環與傾斜平衡環及貯液缸一起繞垂直軸作方位轉動,其具體實現方法與傾斜隨動系統類似。
2.2 隨動過程的仿真
以模擬船舶轉向時的方位隨動過程為例,當船舶轉向時,通過設計的按鈕 t1來觸發船舶轉動,利用語句
ROUTE t1.touchTime TO c1.startTime
將點擊按扭的時間傳遞給時間傳感器c1,再使用語句
ROUTE c1.fraction_changed TO o11.set_fraction
將時間的變化量傳給方向插補器o11,最后通過語句
ROUTE o11.value_changed TO Azimuth1.rotation
以實現在陀螺球穩定指北的情況下貯液缸、方位平衡環、0°—180°刻度線、羅經基線隨船舶轉動。
此時靈敏部分(陀螺球)與隨動部分(貯液缸)產生一個方位偏角,繼而方位敏感線圈檢測出陀螺球與貯液缸之間的失配,產生一個隨動信號,該信號經方位隨動放大器放大后傳給方位電機。在此過程中,通過方位敏感線圈的顏色變化,表明隨動信號的產生。控制時間傳感器的時間周期,達到一定時間,方位電機接收隨動信號,方位電機轉動,帶動方位平衡環、貯液缸 、0°—180°刻度線轉回到陀螺球主軸的位置,使刻度盤的 0°—180°刻度線與陀螺球主軸一致,而基線保持不動,這樣就可以讀出船舶轉動的角度,也就是船舶的航向。
在以上隨動過程的仿真中,調整貯液缸材質的T ransparency域值,便可使貯液缸透明,隨動部分和靈敏部分的旋轉關系可以清晰地呈現出來,從而使觀測者更容易理解陀螺羅經隨動系統的工作過程。
主軸在方位上和高度上的合成運動即為收斂運動,可將其運動軌跡投影到一個平面上,當主軸運動一個時間點,投影面上同時產生相應的運動軌跡,利用投影點運動的方法來觀察主軸的運動規律。
將方位角和高度角的226個值合成后轉化為在投影面上的坐標值并賦給坐標插補器dian的Keyvalue域,使用時間傳感器 Time使索引線集節點orbit也按226個時間點來取相應的值,然后利用語句
ROUTE dian.value_changed TO orbit.point
將這些坐標值在同一時間傳感器的控制下依次傳遞給索引線集節點,以實現在主軸做收斂減幅運動的同時,其軌跡在投影面上被顯示出來,如圖5所示,它是一條收斂螺旋曲線。
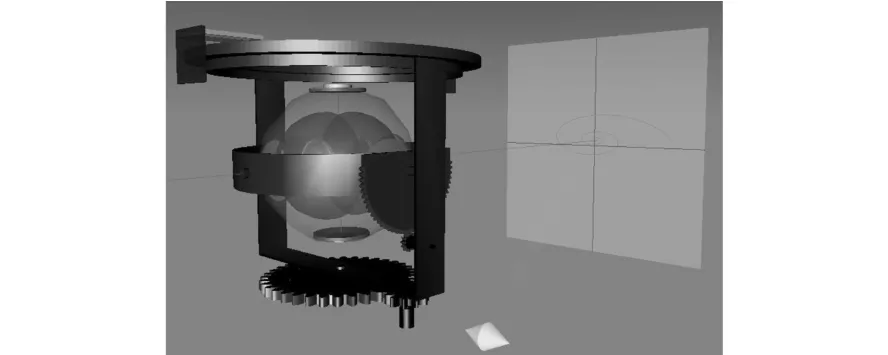
圖5 羅經指北過程仿真圖
3 結 語
利用VRML來實現陀螺羅經的仿真,可以在VRML瀏覽器插件的支持下,直接在IE中進行交互式控制與演示[7-8]。
采用VRML對陀螺羅經三維結構和工作原理進行的仿真是利用現代計算機技術對教學改革的一個典型范例,該方法能夠有效地改善講授陀螺羅經知識的教學效果,是對傳統教學的一種突破,得到了航海專業的學生、教師和專家們的一致認可。基于VRML的陀螺羅經三維仿真方法還可以應用到其他學科的教學中,具有一定的推廣意義。
1 黃文麗,盧碧紅,楊志剛等.V RML語言入門與應用[M].北京:中國鐵道出版社,2003.
2 段新昱.虛擬現實基礎與VRM L編程[M].北京:高等教育出版社,2004.
3 楊在金.航海儀器[M].大連:大連海事大學出版社,1998.
4 董 銘,周玉.VRM L程序員實用例庫[M].北京:電子工業出版社,2000.
5 孫軍華,季忠,王忠雷等.基于 VRM L的交互式虛擬裝配平臺的實現[J].計算機應用,2002,10,22(10):101-102
6 方錫武.基于VRM L的機械傳動機構的運動仿真[J].計算機仿真,2007,24(6):203-206.
7 李 營,黃海東,姚其昌等.六自由度駕駛模擬器視景仿真系統研究.武漢理工大學學報(交通科學與工程版),2005,29(3):388-391.
8 王 碩,周昕宇.VRM L與外界數據交互的技術實現[J].計算機系統應用,2000,(2):38-41.
