數字化軌道水平測量系統的研究
2011-09-04 04:43:38朱洪濤曾愈有
鐵道建筑 2011年2期
朱洪濤,曾愈有
(南昌大學 機電工程學院,南昌 330031)
數字化軌道水平測量系統的研究
朱洪濤,曾愈有
(南昌大學 機電工程學院,南昌 330031)
軌道尺作為鐵路工務常用軌道檢測器具正逐漸向數字化、智能化方向發展。通過對數字化軌道水平測量系統的分析和研究,為數字化軌道尺的研制提供電子和軟件設計參考。系統基于定點測量原理,采用高精度傾角傳感器和高分辨率A/D轉換器,并運用系統遷零、溫度補償、硬件和軟件濾波、可靠性設計等措施保證測量精度和可靠性。
水平 軌道檢測 數字化軌道尺 定點測量
隨著鐵路高速化、信息化的發展,對鐵路軌道參數要求越來越高,機械式軌道檢測技術已漸漸無法滿足軌道檢測的要求,而基于電子和微控制器技術的數字化軌道檢測系統已成為當前發展趨勢。數字化軌道檢測技術具有精度高、測量效率高、使用方便、自動存儲數據等優點。常見的數字化軌道檢測技術有定點測量和連續測量兩種方式。定點測量的檢測儀器的典型代表是軌距尺、軌道測量儀等,采用連續測量原理的檢測儀器有軌道檢查儀等。鐵路軌道一項重要參數是水平(曲線處稱超高),定義為鐵路同一橫截面上左右兩軌頂面的高差。本文從軌道水平的測量系統的要求分析,探討和設計了一套基于定點測量的軌道水平測量系統,以滿足數字化軌道尺的水平檢測要求。
1 軌道水平測量系統需求分析
如前所述軌道測量技術包括定點測量和連續測量。連續測量的特點是被測信號是連續變化的過程量,測量過程受濾波性能滯后和軌道飛邊造成干擾信號等因素的影響。因此,基于連續測量的水平檢測系統要求有:①精度要高;②系統動態品質好。定點測量的特點是被測水平信號是穩態值,因此不存在濾波滯后的問題,可很好地濾除隨機噪聲,且系統動態品質要求不高。數字化軌道尺采用定點測量原理,測量靈活,具有針對性,可以獲得較高的測量精度和測量穩定性。由于數字化軌道尺的使用場合、使用方式、外觀形狀等因素要求軌道水平測量系統體積小,價格低,功耗小。本軌道水平測量系統針對鐵道部對0級準確度數顯軌距尺[1-2]的要求來設計(見表1)。

表1 軌道水平測量系統參數設計指標 mm
2 軌道水平測量系統總體設計
根據軌道水平的定義,對于普通鐵路在曲線處軌距加寬而采用正切檢測原理(如圖1所示)。針對提速鐵路由于鐵路曲線處軌距不加寬[3],因此超高檢測符合正弦原理(如圖2所示)。
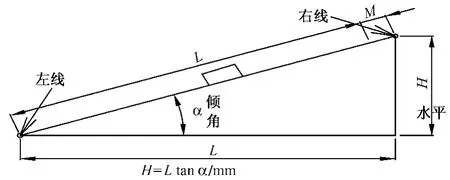
圖1 普通鐵路水平檢測原理(正切原理)
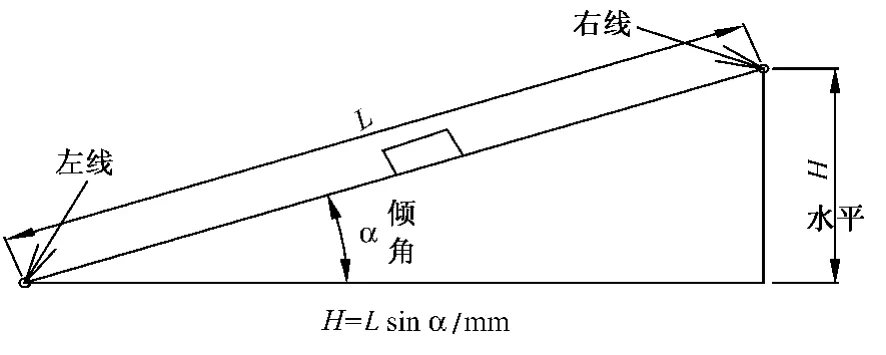
圖2 提速鐵路水平檢測原理(正弦原理)
本文所述系統是針對提速鐵路設計,故采用圖2正弦檢測原理,因此水平可通過檢測兩軌道間的傾角值和該點處軌距值間接得到。因此該系統可利用傾角傳感器測傾角值,并通過A/D轉換器和MCU進行采樣和運算求得水平值。系統總體架構圖如圖3所示。
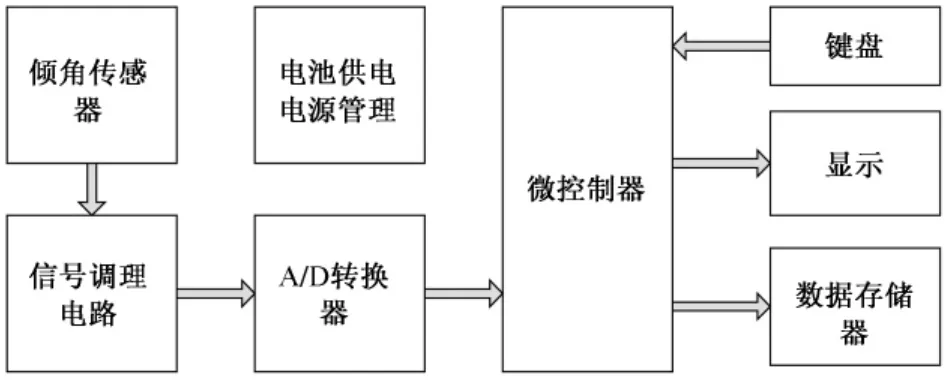
圖3 系統總體架構
2.1 傾角傳感器
由水平分辨率要求,根據公式
由水平量程要求,根據公式
為滿足以上兩點要求,選用SCA103T(D-04)高精度傾角傳感器,該傳感器采用了高度集成電子及成熟的MEMS傳感器技術和差動測量原理,具有很高的可靠性和穩定性。其傾角測量范圍為 ±15°,分辨率為0.001°(@模擬輸出)和0.009°(@數字輸出),雙通道0~5 V輸出和數字SPI輸出。傳感器內置溫度傳感器,可補償靈敏度漂移誤差和溫度引起的偏差[4]。
2.2 A/D轉換器
由于傾角傳感器的最小分辨率為0.001°,轉換為電壓信號約為0.2 mV,為使A/D能正確無誤地轉換傳感器信號,A/D位數最少需15位,且系統轉換速率不要求高速率,因此采用16位(Σ-Δ)A/D轉換器AD7705。它是一種片內帶數字濾波器的電荷平衡式雙通道16位模擬/數字轉換器,旨在為寬動態范圍測量、工業控制或工藝控制中的低頻信號的轉換而設計的[5]。
2.3 信號調理電路
SCA103T兩通道分別輸出+0.25~+4.75 V和+4.75~+0.25 V的直流信號,經運放差分后得到-4.5~+4.5 V信號,由于AD7705只能處理0~2.5 V(單極性工作)或0~5 V(雙極性工作)的信號,因此采用電平遷移電路將 -4.5~+4.5 V信號轉換為0~2.5 V信號輸出。傳感器外圍電路和信號處理電路(如圖4)。
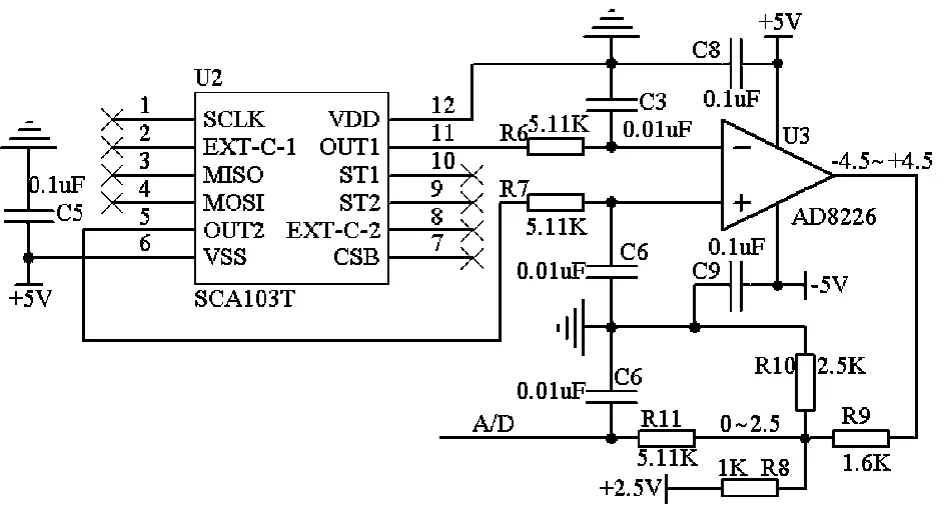
圖4 SCA103T信號調理電路
2.4 數據處理電路
采用STC12C5A60S2單片機作微控制器,對信號進行采樣和處理。鍵盤和顯示電路用于對軌道尺進行系統標定、系統遷零、測量等操作及操作結果等信息的顯示。數據存儲器采用非易失大容量數據存儲器用于存儲測量數據。
3 軌道水平測量系統關鍵技術分析
3.1 系統輸出特性
SCA103T角度至電壓的換算采用以下公式[4]

式中,a為傾角,VDout為電壓差分輸出值,Offset為傾角為0時電壓差分輸出值,一般為0,Sens為傳感器靈敏度,SCA103T-D04 為 280 mV/°。
由公式(1)可得

高速鐵路軌道水平的測量原理公式為

式中,H為軌道水平值,L為測量點軌距值加鐵軌寬(取1 505 mm),sinα為軌道尺傾角的正弦值。
因此,由公式(2)、公式(3)可得

3.2 系統標定和遷零
3.2.1 系統標定
由于輸入模擬量和輸出數字量為線性關系,軟件上可通過系統標定技術計算出模擬量H與A/D轉換后的數字量D間的關系系數(即標定系數)。線形系統標定原理公式為

y為模擬量,x為數字量,A為增益,B為零點漂移。因此采用兩點標定法(y1,x1)、(y2,x2)由公式
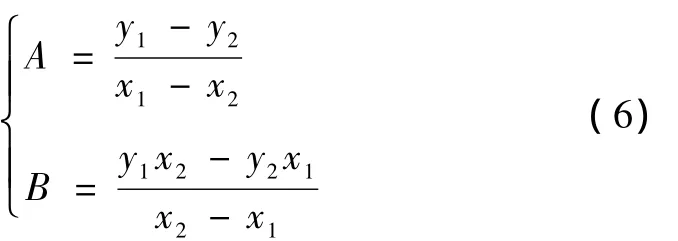
即可求出增益A和零點漂移 B,并將 A和 B值存入EEPROM中。
3.2.2 系統遷零
由于傳感器自身制造誤差、安裝應力、外界環境影響和電路硬件偏差等會使檢測系統產生零點漂移,而零點作為傳感器基準對系統檢測精度有重要的關系,因此,需對其進行實時遷零。通常零位遷移的措施有三種:機械遷零、電子遷零和軟件修正。
機械遷零是采用專門的機械機構,在遷零時利用該機構調整傳感器,使輸出向零靠近。電子遷零是在前向通道電路上增加自動調零電路,通過該電路調整信號輸出,達到遷零的目的。
軟件修正法是將輸出零點漂移值存入非易失存儲器,測量時將測量值減去該值的結果作為最終有效結果輸出。常用實現軟件修正的兩種方法包括:①通過水平儀檢定平臺進行校準;②現場反向補償法,即在鐵路軌道某一點處正向測量水平值H1,再將軌道尺掉頭180°在同一點逆向測量水平值 H2,求零位漂移 ΔH=(H1+H2)/2。
本系統中結合了機械遷零和軟件遷零技術,實現系統零位的正確修正。
3.3 系統高精度實現措施
3.3.1 硬件濾波和軟件濾波
由于傾角傳感器內部A/D轉換會對模擬輸出產生干擾,脈沖間隔約為50~70 us,持續約1 us,為降低此信號噪聲,對兩通道信號分別進行RC低通濾波,以濾除傳感器內部A/D轉換噪聲和工頻干擾。
所有的A/D轉換器在信號轉換過程中都會帶來電噪聲(或稱器件噪聲)和量化噪聲,這些噪聲雖然微弱,但對系統精度會產生一定的影響,應盡量濾除。系統采用的A/D7705轉換器自帶數字濾波器,該數字濾波器可編程截斷頻率和輸出更新率,實現對轉換數據進行濾波,明顯改善了噪聲性能。
由于電源紋波、脈沖干擾的存在,會使系統產生隨機干擾造成誤差,這種干擾可通過硬件電路去除,也可通過數字濾波技術[6]處理,因干擾只影響個別采樣數據且和其它數據存在較大的偏差,因此采用中值濾波算法,將連續采樣的N個(通常為奇數)數據進行排序,取中間值為濾波后的數據,能很好地濾掉脈沖干擾。
3.3.2 溫度補償
系統傾角傳感器易受溫度影響產生誤差,另外系統水平檢測值受軌距影響,而軌距尺尺體材料和軌道軌枕材料線形膨脹系數不同,在溫度變化時會使軌距測量值存在誤差。因此為提高精度,減少誤差,需對系統進行溫度補償。溫度補償包括兩個方面:①傳感器內部自帶溫度傳感器,該傳感器可用于內部偏移補償,大大解決了傳感器的溫度漂移;②軟件補償。系統采用溫度傳感器測量環境溫度,根據線形膨脹與溫度的關系,編制算法求出溫度補償值,再設計溫度誤差補償程序可自動補償軌距溫度誤差,從而提高了水平值精度。
3.4 系統可靠性設計
系統在工作過程會遇到不同的干擾,導致系統工作不正常,嚴重的會使系統死機,為了提高系統抗干擾能力,對系統采取了以下可靠性措施。
1)硬件看門狗技術。單片機具有硬件看門狗功能,在程序中插入喂狗指令,當程序跑飛或進入死循環時,無法對看門狗進行正常“喂狗”,由此判定系統進入死循環,并對系統作復位操作,脫離死循環。
2)指令冗余技術和軟件陷阱技術[7]。單片機受干擾出錯時,程序會“亂飛”,當亂飛到雙字節或三字節指令時會誤將操作數當作操作碼執行,導致程序出錯。為預防這種錯誤程序采用了指令冗余技術,在雙字節和三字節指令后添加兩個字節以上的空操作指令,這樣即便程序亂飛了也可將其引入正常軌道。但有時亂飛程序會進入非程序區,此時冗余指令便無法起作用。可在非程序區設置軟件陷阱,攔截亂飛程序,將其引向指定位置,再進行出錯處理,這就是軟件陷阱技術。
3.5 系統軟件流程
軟件程序主要包括系統初始化、A/D數據轉換和采集、數字濾波、溫度補償、標度轉換、數據零位修正等,采用KEIL C51開發編譯平臺,其系統軟件流程圖如圖5所示。
4 系統水平測量不確定度分析
系統水平標準不確定度分量有4個來源(見表2),對合成不確定度和擴展不確定度計算如下:
1)合成不確定度

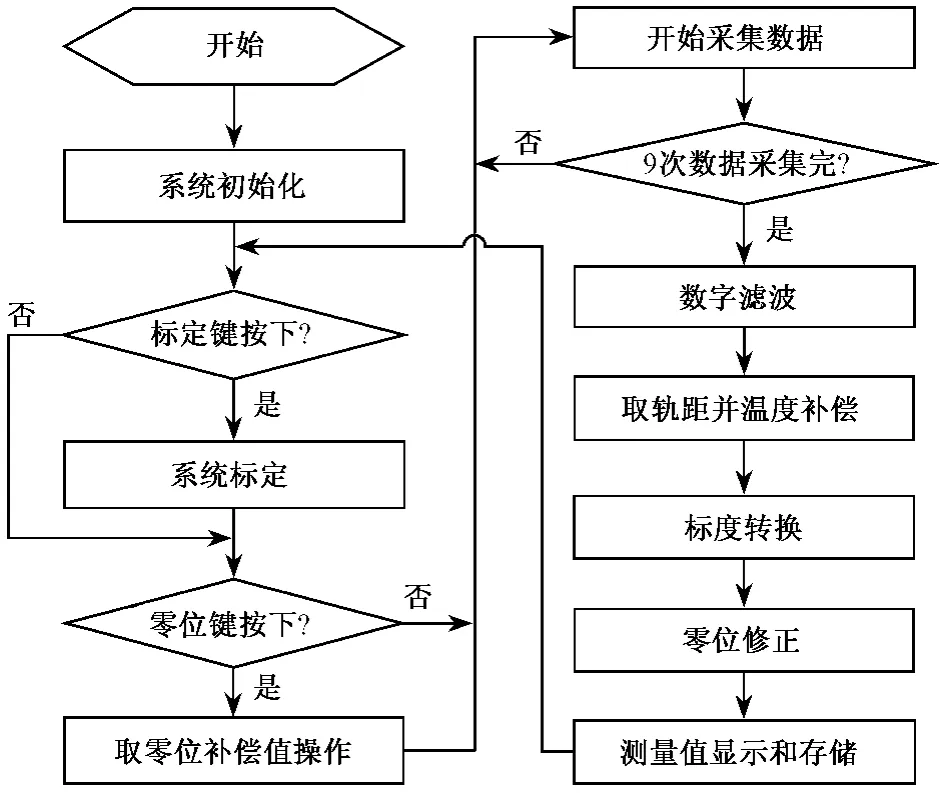
圖5 系統軟件流程
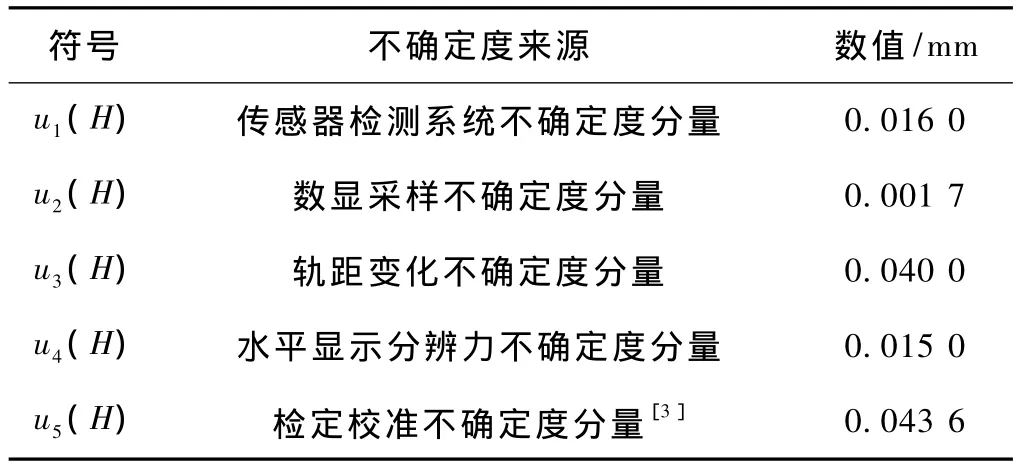
表2 系統不確定度分量分析
2)擴展不確定度(包含因子K取2)

根據標準軌距數顯軌距尺通用技術條件,擴展不確定度U約≤1/3最大示值誤差,符合要求。
5 試驗結果與數據分析
試驗前將檢測系統在江西日月明公司BDQ-1標定器上進行系統調零和標定,并在JDT-01檢定臺進行檢定校準,通過在0~+100 mm水平范圍內進行試驗測量,列出以下部分試驗數據(見表3)。
對試驗數據和分析處理可得系統性能指標:①最大示值誤差±0.20 mm;②重復性0.10 mm;③掉頭誤差0.10 mm;④零位誤差 ±0.15 mm;⑤分辨率0.05 mm,均滿足要求。
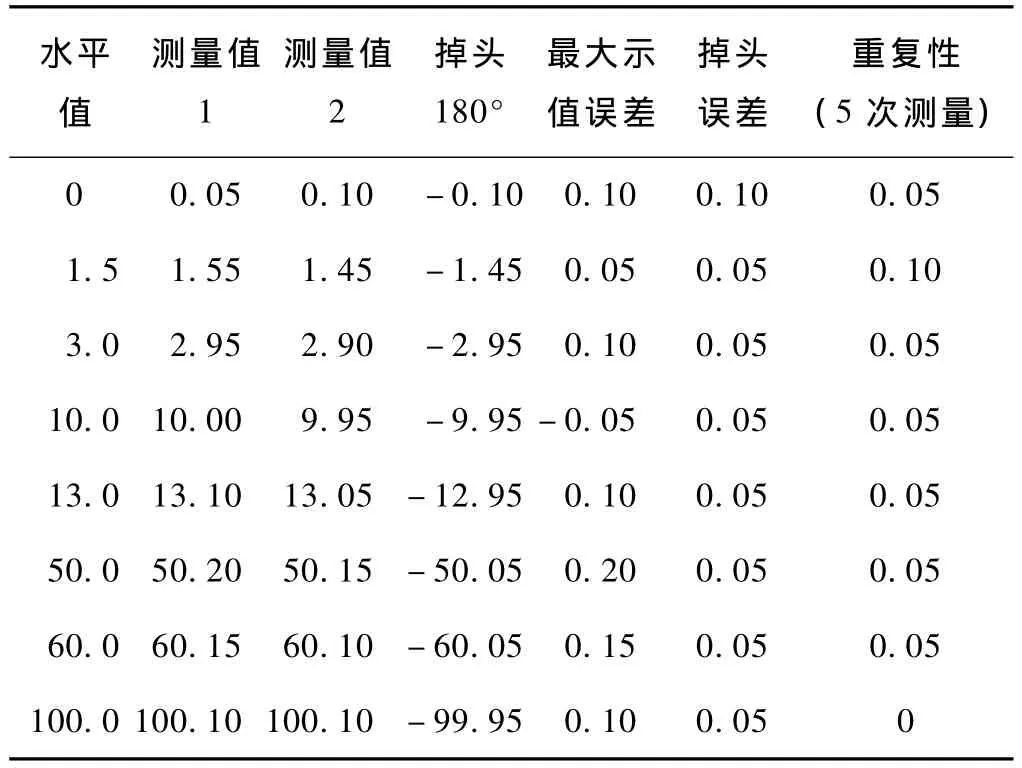
表3 0~+100 mm水平測量值數據與處理 mm
6 結語
本文提出了一種數字化軌道水平測量系統的設計方法和實現原理,該系統能夠精確測量高速鐵路軌道水平,各性能指標達到了鐵路數顯軌距尺水平測量0級準確度的技術要求,可應用于數字化軌道尺,前景較好,也可對同類產品設計提供參考。
[1]國家質量監督檢驗檢疫局.JJG 219—2008 標準軌距鐵路軌距尺檢定規程[S].北京:中國計量出版社,2008.
[2]中華人民共和國鐵道部.TB/T 1924—2008 標準軌距鐵路軌距尺[S].北京:中國鐵道出版社,2008.
[3]王彥春.鐵路軌距尺的主要技術問題與對策[J].鐵道技術監督.2008(4):22-24.
[4]Inclinometer SCA103T Series Data Sheet.VTI Technologies Oy.[EB/OL]http://www.vti.fi.
[5]陳勇鋼,吳伯農.A/D7705高精度數據采集的實現[J].國外電子測量技術,2006(1):38-40.
[6]王慶河,王慶山.數據處理中的幾種常用數字濾波算法[J].現代電子技術,2003(4):53-54.
[7]鄭偉.單片機抗干擾及可靠性設計[J].兵工自動化,2005(6):112-114.
U216.3
B
1003-1995(2011)02-0104-04
2010-08-20;
2010-12-01
朱洪濤(1962— ),男,湖南雙峰人,教授,碩士。
(責任審編 王天威)
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
人大建設(2019年12期)2019-05-21 02:55:32
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25