艦載導(dǎo)彈發(fā)射數(shù)值模擬與點(diǎn)火時機(jī)研究①
2011-08-31 06:37:40陳余軍趙剛練
固體火箭技術(shù) 2011年6期
陳余軍,姜 毅,趙剛練
(北京理工大學(xué)宇航學(xué)院,北京 100081)
0 引言
在艦船上發(fā)射導(dǎo)彈,受海情的影響艦船姿態(tài)具有動態(tài)隨機(jī)性,任意時刻和狀態(tài)下的發(fā)射得到的導(dǎo)彈出筒姿態(tài)幾乎都不相同,根據(jù)制導(dǎo)與控制系統(tǒng)對導(dǎo)彈出筒姿態(tài)參數(shù)的要求[1],需要對各種環(huán)境和條件下的發(fā)射出筒姿態(tài)進(jìn)行預(yù)估,為制導(dǎo)控制系統(tǒng)的設(shè)計提供參考,對武器系統(tǒng)的設(shè)計與評估有重要意義。隨著艦載武器的發(fā)展,國內(nèi)外學(xué)者已在相關(guān)技術(shù)領(lǐng)域展開了相關(guān)研究,齊強(qiáng)等[2]基于理論力學(xué)方法建立運(yùn)動方程組分析海情變化對導(dǎo)彈初始彈道的影響;于存貴等[3]基于Adams軟件分析了艦載火箭炮在不同海況下的射擊精度;段齊駿等[4]運(yùn)用船舶耐波性理論,并結(jié)合概率與數(shù)理統(tǒng)計原理研究了艦載武器裝備發(fā)射精度與載體運(yùn)動的關(guān)系。目前研究多數(shù)基于理論力學(xué)方法討論載體運(yùn)動及海況對武器發(fā)射精度的影響,對于武器發(fā)射極限狀態(tài)及時機(jī)選擇的研究幾乎空白。
本文圍繞艦載導(dǎo)彈發(fā)射問題,重點(diǎn)分析艦載發(fā)射的惡劣狀態(tài)以及導(dǎo)彈出筒姿態(tài)與海況、推力、發(fā)射點(diǎn)及發(fā)射時刻之間的關(guān)系。考慮到計算工況縱多,文中將利用成熟而高效的商業(yè)軟件Adams平臺,通過模型參數(shù)化和腳本語言實現(xiàn)艦載導(dǎo)彈發(fā)射過程的自動化仿真和數(shù)值試驗,找出最惡劣的發(fā)射狀態(tài)和較合理的發(fā)射條件和窗口,為彈上控制系統(tǒng)設(shè)計和發(fā)射控制提供綜合性參考。
1 動力學(xué)仿真建模
1.1 模型簡化
考慮到導(dǎo)彈發(fā)動機(jī)點(diǎn)火失敗引起的發(fā)射安全性問題[5],艦載導(dǎo)彈武器系統(tǒng)通常采用準(zhǔn)垂直方式(通常向側(cè)舷傾斜小于5°)發(fā)射。本文選取垂直自推力不同時離軌的艦載發(fā)射系統(tǒng)為設(shè)計對象,依據(jù)多體動力學(xué)原理對艦載導(dǎo)彈發(fā)射系統(tǒng)進(jìn)行簡化,簡化后的系統(tǒng)由導(dǎo)彈、前后滑塊、導(dǎo)軌、發(fā)射筒和艦船等構(gòu)件組成。艦載發(fā)射系統(tǒng)簡化模型示意如圖1所示,其中A、B分別代表靠近船頭和船尾的2個發(fā)射點(diǎn)。
圖1 艦載發(fā)射系統(tǒng)示意圖Fig.1 Diagram of ship-based launch system
1.2 動力學(xué)模型
點(diǎn)火前導(dǎo)彈隨艦船一起在海浪中搖蕩,點(diǎn)火后導(dǎo)彈瞬間沿導(dǎo)軌運(yùn)動,初始階段前后滑塊都受到約束,接著前后滑塊先后相繼滑離導(dǎo)軌。導(dǎo)彈運(yùn)動經(jīng)歷了全約束到半約束的過渡,由于載體的搖蕩運(yùn)動以及滑塊與導(dǎo)軌之間的間隙因素,整個導(dǎo)彈發(fā)射過程的運(yùn)動和受力十分復(fù)雜。
為建立動力學(xué)模型進(jìn)行假設(shè)如下:
(1)所有構(gòu)件均假設(shè)為剛體,不考慮結(jié)構(gòu)變形對導(dǎo)彈運(yùn)動的影響;
(2)除滑塊與導(dǎo)軌之間的非理想約束,其他連接均假設(shè)為理想約束;
(3)實際中導(dǎo)彈與船艦質(zhì)量相差懸殊,并考慮到后文船艦運(yùn)動描述方便,忽略發(fā)射時導(dǎo)彈運(yùn)動對艦船運(yùn)動產(chǎn)生的影響;
(4)為考慮更惡劣情況,為船艦初置一個橫搖和縱搖角度。
各構(gòu)件之間連接關(guān)系:滑塊與導(dǎo)彈固連;導(dǎo)軌與發(fā)射筒固連;發(fā)射筒與艦船固連;滑塊與導(dǎo)軌之間為接觸約束。基于Adams建立多體動力學(xué)模型,作用在彈上推力由發(fā)動機(jī)點(diǎn)火試驗數(shù)據(jù)擬合得到,可選取不同的推進(jìn)劑組分得到不同大小的推力。
為描述導(dǎo)彈運(yùn)動,定義彈體坐標(biāo)系Om-xmymzm,原點(diǎn)位于導(dǎo)彈質(zhì)心,x沿彈軸并指向彈頭,z沿艦船橫搖軸方向,y根據(jù)右手坐標(biāo)法則確定。記彈體角速度在彈體坐標(biāo)系Om-xmymzm下沿三坐標(biāo)軸方向的分量為滾轉(zhuǎn)、偏航和俯仰角速度,對應(yīng)角位移則由積分得到。
1.3 動力學(xué)方程與求解
Adams采用拉格朗日乘子法建立系統(tǒng)動力學(xué)方程:
式中 Ek為系統(tǒng)動能;q為系統(tǒng)廣義坐標(biāo)列陣;Q為廣義力列陣;λ為對應(yīng)于完整約束的拉氏乘子列陣;μ為對應(yīng)于非完整約束的拉氏乘子列陣。

采用GSTIFF積分器通過Gear預(yù)估校正算法可求解上述矩陣方程。
1.4 接觸參數(shù)設(shè)置
艦船的搖擺使得導(dǎo)彈上的滑塊與導(dǎo)軌發(fā)生接觸碰撞,從而直接影響導(dǎo)彈的運(yùn)動規(guī)律和出筒姿態(tài),且艦船位于不同姿態(tài)時滑塊與導(dǎo)軌的接觸碰撞情況也不一樣。選擇合理的間隙接觸計算模型和進(jìn)行準(zhǔn)確的參數(shù)設(shè)置是保證仿真精度的重要因素,本文采用非線性彈簧阻尼模型模擬含間隙的接觸碰撞問題,相應(yīng)的接觸碰撞力計算公式[6]為

式中 Nn為兩物體間的法向作用力;?l為兩物之間的切向作用力即摩擦力;k為等效剛度系數(shù);c(δ)為阻尼函數(shù);δ為兩物體沿法線方向的最大穿透量;μ(vτ)為摩擦系數(shù)函數(shù);vτ為切向相對運(yùn)動速度。
滑塊和導(dǎo)軌的材料分別為鋼和鋁,參考軟件幫助設(shè)置參數(shù):接觸剛度為38 000 N/mm,碰撞阻尼系數(shù)為28 N·s/mm,彈性力貢獻(xiàn)指數(shù)為1.5,最大穿透深度為0.1 mm,靜摩擦系數(shù)為0.3,動摩擦系數(shù)為0.1,靜摩擦轉(zhuǎn)換速度為0.1 mm/s,動摩擦轉(zhuǎn)換速度為10 mm/s。
2 艦船運(yùn)動模擬
艦船的運(yùn)動特性與海況、自身結(jié)構(gòu)和航向有關(guān)。實際艦船在海中的運(yùn)動十分復(fù)雜,為研究方便需要進(jìn)行簡化,本文重點(diǎn)考慮艦船的橫搖、縱搖和垂蕩運(yùn)動對導(dǎo)彈運(yùn)動及出筒姿態(tài)的影響。
實際的艦船運(yùn)動由多個不規(guī)則波下分運(yùn)動的線性疊加組成,由于缺乏艦船的具體屬性參數(shù),無法通過船舶耐波性原理和切片理論求解艦船在海中運(yùn)動響應(yīng)參數(shù)。
容易知道,越惡劣海況下導(dǎo)彈發(fā)射越危險,本文采用有限賦值法思想,選取搖蕩幅值及對應(yīng)最小周期構(gòu)成的正弦波來描述艦船運(yùn)動,這樣能夠代表某級海況的極限工況,分析極限狀態(tài)下導(dǎo)彈的出筒姿態(tài)可作為設(shè)計的臨界條件,因此艦船的垂蕩、橫搖和縱搖運(yùn)動可簡化描述為[7]

式中 ηb、γ、θ分別為垂蕩位移、橫搖位移和縱搖位移;r0、T0分別為垂蕩幅值和周期;ra、Tγ為橫搖幅值和周期;θa、Tθ為縱搖幅值和周期。
本文研究的艦載武器系統(tǒng)屬于大型艦船,其在4、5級海況下的搖蕩特性參數(shù)如表1所示[8]。
表1 大型艦船的搖蕩幅值與周期Table 1 Straying amplitude and cycle of big ship
定義與大地固連的地面全局坐標(biāo)系O-xyz,原點(diǎn)位于艦船重心;與艦船相連的艦船坐標(biāo)系Os-xsyszs,原點(diǎn)位于艦船重心。在上述坐標(biāo)系下,通過Adams中的Point Motion工具定義艦船的6自由度運(yùn)動,并根據(jù)式(4)定義艦船的橫搖、縱搖和垂蕩運(yùn)動函數(shù)。容易看出,艦船的姿態(tài)與時間有關(guān),不同時刻點(diǎn)火艦船位于不同姿態(tài)。
3 數(shù)值仿真試驗設(shè)計
根據(jù)表1中艦船的橫搖、縱搖和垂蕩各分運(yùn)動的周期,選取最小周期描述艦船運(yùn)動,在不考慮各分量初始相位情況下由最小公倍數(shù)原理得到艦船運(yùn)動近似周期為40 s。為模擬艦船不同姿態(tài)下的點(diǎn)火,對艦船一個運(yùn)動周期進(jìn)行離散且每隔0.5 s進(jìn)行采樣發(fā)射,對應(yīng)點(diǎn)火時刻分別取 0、0.5、1、…、40 s,計算每 1 次發(fā)射導(dǎo)彈的出筒姿態(tài),得到艦船姿態(tài)與其對應(yīng)的導(dǎo)彈出筒姿態(tài)之間的變化規(guī)律,單個周期內(nèi)單發(fā)彈的試驗總次數(shù)為81。
為考察A、B兩發(fā)射點(diǎn)在2種不同推力、2種不同海況下的發(fā)射特性,共需要進(jìn)行發(fā)射試驗總數(shù)為81×8=648種。推力分別取為TL1和TL2,且TL1<TL2,海況取4級和5級。
由于試驗工況和結(jié)果數(shù)據(jù)文件較多,本文通過自編程序循環(huán)調(diào)用Adams軟件的批處理命令進(jìn)行動力學(xué)仿真,具體步驟為:通過程序修改模型cmd文件得到不同工況需要的模型及參數(shù)設(shè)置,在后臺通過批處理命令調(diào)用和運(yùn)行cmd文件,仿真得到相應(yīng)的結(jié)果數(shù)據(jù)文件,最后通過自編程序進(jìn)行數(shù)據(jù)處理得到不同點(diǎn)火時刻導(dǎo)彈出筒角位移和角速度。虛擬試驗的整個計算流程如圖2所示。
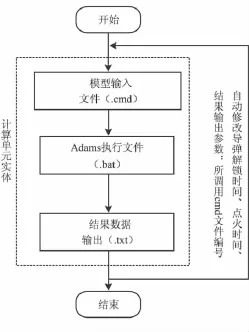
圖2 虛擬試驗流程Fig.2 Virtual experiment process
4 仿真試驗結(jié)果
通常使用角位移和角速度描述導(dǎo)彈運(yùn)動,前者描述姿態(tài)的初始偏差,后者反映速度變化的快慢,文中選取角速度參數(shù)進(jìn)行描述。
4.1 不同推力下的發(fā)射模擬
進(jìn)行了5級海況下A、B發(fā)射點(diǎn)在TL1和TL2推力下的發(fā)射試驗,得到導(dǎo)彈出筒角速度隨點(diǎn)火時刻的變化如圖3所示。
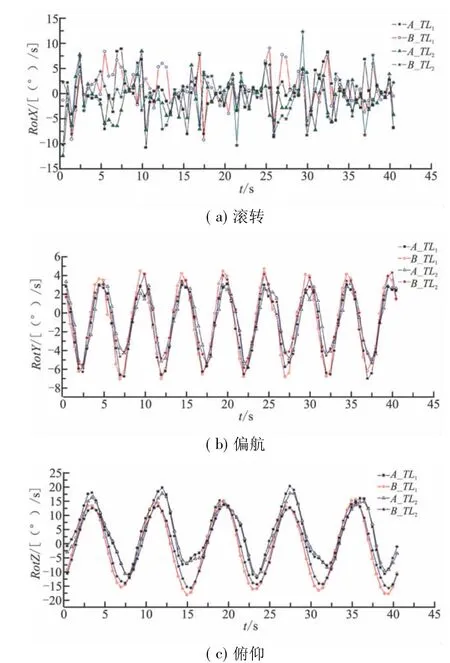
圖3 導(dǎo)彈出筒角速度隨點(diǎn)火時刻的變化曲線Fig.3 Change curves of missile outlet angular velocity with ignition time
由圖3(a)可知,滾轉(zhuǎn)角速度曲線無明顯周期特征。相同推力下,不同發(fā)射點(diǎn)對應(yīng)最惡劣工況的點(diǎn)火時刻不一致,且A發(fā)射點(diǎn)曲線峰值較B發(fā)射點(diǎn)的大;同一發(fā)射點(diǎn),不同推力下對應(yīng)最惡劣工況的點(diǎn)火時刻不一致,曲線峰值與推力呈反比。滾轉(zhuǎn)姿態(tài)主要受滑塊和導(dǎo)軌之間的接觸碰撞影響,與離軌時刻碰撞情況直接相關(guān);不同發(fā)射點(diǎn)受船艦牽連運(yùn)動影響形成的碰撞程度不一致;小推力發(fā)射下導(dǎo)彈在軌運(yùn)動時間長,與導(dǎo)軌接觸碰撞次數(shù)多,受牽連運(yùn)動影響可能性增加。
由圖3(b)可知,偏航角速度曲線有8個波峰,曲線波動平均周期約為5 s,與艦船縱搖運(yùn)動周期接近;各曲線波峰波谷對應(yīng)時刻較為一致。相同推力下,B發(fā)射點(diǎn)曲線峰值稍大于A發(fā)射點(diǎn);同一發(fā)射點(diǎn),峰值與推力呈反比關(guān)系;曲線的非零對稱特性與模型中艦船的初始相位相匹配。出筒偏航姿態(tài)主要由船艦縱搖分運(yùn)動的牽連運(yùn)動形成,偏航姿態(tài)變化與船艦縱搖分運(yùn)動規(guī)律相一致,兩者在該分量上的相對運(yùn)動基本可忽略,各曲線之間的差異與發(fā)射點(diǎn)距離縱搖軸位置相關(guān)。
由圖3(c)可知,俯仰角速度曲線有5個波峰,曲線波動平均周期約為8 s,與艦船橫搖運(yùn)動周期接近;各曲線峰值對應(yīng)時刻基本接近。相同推力下,A發(fā)射點(diǎn)峰值稍大于B發(fā)射點(diǎn);同一發(fā)射點(diǎn),曲線峰值與推力呈反比;俯仰曲線非零對稱性同樣與船艦放置的初始位置相關(guān)。與偏航姿態(tài)相對應(yīng),俯仰姿態(tài)主要由船艦橫搖分運(yùn)動的牽連運(yùn)動產(chǎn)生,同樣該分量上的相對運(yùn)動基本可忽略,各曲線之間差異還與發(fā)射點(diǎn)距離橫搖軸位置相關(guān)。
4.2 不同海況下的發(fā)射模擬
為研究海況對導(dǎo)彈發(fā)射出筒姿態(tài)參數(shù)的影響,對艦船在4、5級海況下的發(fā)射進(jìn)行數(shù)值試驗,其中推力取TL1,得到出筒角速度峰值如表2所示。

表2 TL1下導(dǎo)彈出筒角速度峰值Table 2 Outlet angular velocity peak of missile under thrust TL1
由表2可知,4級海況下導(dǎo)彈出筒姿態(tài)角速度各分量峰值相對5級海況均有所下降,尤其是俯仰和偏航姿態(tài),幾乎為線性變化關(guān)系,因為艦船的橫搖、縱搖峰值大小直接影響導(dǎo)彈的出筒偏航和俯仰姿態(tài);不同海況下,相同推力及發(fā)射點(diǎn)對應(yīng)的姿態(tài)曲線在不同時刻達(dá)到峰值。
為驗證仿真結(jié)果,取5級海況對應(yīng)的6發(fā)彈試驗數(shù)據(jù),其中推力TL1下A點(diǎn)發(fā)射對應(yīng)的導(dǎo)彈出筒俯仰角速度最大值為22.6(°)/s、偏航角速度最大值為10.7(°)/s,滾轉(zhuǎn)角速度最大值為 12.4(°)/s,與表 2數(shù)值仿真試驗結(jié)果相比各參數(shù)在量級上基本吻合,相應(yīng)的誤差則由于實際海況的復(fù)雜性難以真實模擬以及仿真模型簡化等因素形成。綜合對比情況反映出仿真模擬結(jié)果基本滿足工程精度要求,表明文中建立的數(shù)值仿真模型基本可信,可用于工程計算與分析。
5 點(diǎn)火時機(jī)分析
根據(jù)上述模擬結(jié)果得到,導(dǎo)彈出筒姿態(tài)與發(fā)射點(diǎn)位置、推力、海況以及發(fā)射時的艦船姿態(tài)均相關(guān),需要根據(jù)具體發(fā)射狀態(tài)確定點(diǎn)火時刻。仍然選取代表導(dǎo)彈飛行特性的角速度參數(shù)作為點(diǎn)火可行的判斷指標(biāo),為考慮各姿態(tài)分量的綜合效應(yīng),進(jìn)行角速度求模,得到導(dǎo)彈出筒角速度的模

其中,右邊3項分別對應(yīng)出筒時刻的俯仰、偏航和滾轉(zhuǎn)角速度分量。
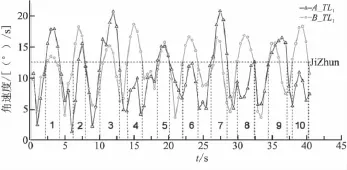
圖4 導(dǎo)彈出筒角速度模隨點(diǎn)火時刻的變化曲線Fig.4 Change curves of missile outlet angular velocity modular with ignition time
圖4反映出2條曲線波峰對應(yīng)時刻基本一致,曲線的波峰和波谷基本相互交替包含,A發(fā)射點(diǎn)p~曲線峰值較B發(fā)射點(diǎn)的高。根據(jù)相應(yīng)戰(zhàn)術(shù)指標(biāo)要求,定義導(dǎo)彈出筒姿態(tài)角速度模低于12.5(°)/s對應(yīng)的時間區(qū)間為安全點(diǎn)火區(qū)間,超出部分對應(yīng)的時間區(qū)間定義為危險區(qū)間。由圖4曲線得到A、B發(fā)射點(diǎn)的公共危險點(diǎn)火時刻區(qū)間有 1、2、3、5、7、9,僅屬于 B 發(fā)射點(diǎn)危險點(diǎn)火時刻區(qū)間有4、6、8、10,那么在選取的發(fā)射周期內(nèi)除去上述區(qū)間即為安全點(diǎn)火區(qū)間。
依據(jù)上述定義得到,A發(fā)射點(diǎn)的安全點(diǎn)火區(qū)間近似為(單位:s):[0,2]、[4.2,6.1]、[7.9,10]、[12.8,17.2]、[20,26.1]、[28.4,34.4]、[37,40]。B 發(fā)射點(diǎn)的安全點(diǎn)火區(qū)間近似為(單位:s):[0,2]、[4.2,6.1]、[7.9,10]、[12.8,14]、[16.1,18.3]、[20.1,22]、[24.2,26.1]、[28.4,29.8]、[32.4,34.4]、[37,38]。將這些數(shù)據(jù)載入發(fā)射控制程序,在導(dǎo)彈點(diǎn)火前瞬間實時判斷當(dāng)前時刻是否在有效點(diǎn)火區(qū)間內(nèi),實現(xiàn)通過選取點(diǎn)火時機(jī)提高發(fā)射精度。
此外,考慮到不同分量惡劣工況對應(yīng)的時刻不一致性,有必要結(jié)合制導(dǎo)控制系統(tǒng)對出筒姿態(tài)各個分量的敏感性和調(diào)控能力來確定主姿態(tài)分量,在此基礎(chǔ)上對上述安全點(diǎn)火區(qū)間進(jìn)行修正,得到滿足要求的點(diǎn)火區(qū)間。
6 結(jié)論
(1)導(dǎo)彈出筒俯仰與偏航角速度主要受艦船橫搖和縱搖運(yùn)動影響,其峰值與船艦的橫縱搖峰值成正比;導(dǎo)彈出筒滾轉(zhuǎn)角速度與滑塊和導(dǎo)軌之間的接觸碰撞激烈程度有關(guān),與艦船的搖蕩運(yùn)動無明顯線性關(guān)系。
(2)導(dǎo)彈出筒姿態(tài)參數(shù)峰值與海況級數(shù)成正比,建議選擇較低級海況進(jìn)行發(fā)射;推力對導(dǎo)彈出筒偏航和俯仰姿態(tài)的影響不大,但與出筒滾轉(zhuǎn)角速度呈相反趨勢,在滿足相關(guān)約束條件下建議采用較大的推力發(fā)射。
(3)根據(jù)數(shù)值仿真試驗得到的惡劣狀態(tài)發(fā)射性能參數(shù)設(shè)計制導(dǎo)與控制系統(tǒng),同時還可根據(jù)出筒姿態(tài)變化規(guī)律選擇發(fā)射窗口,但是不同發(fā)射點(diǎn)處的最佳點(diǎn)火時機(jī)需要結(jié)合推力和海況等因素來綜合確定。
[1]姚昌仁.火箭導(dǎo)彈發(fā)射裝置設(shè)計[M].北京:北京理工大學(xué)出版社,1998.
[2]齊強(qiáng),李善高.海情對導(dǎo)彈離軌姿態(tài)的影響[J].彈箭與制導(dǎo)學(xué)報,2000(4):51-56.
[3]于存貴,李自勇,王惠方,等.艦載火箭炮發(fā)射動力學(xué)仿真[J].彈道學(xué)報,2007,19(2):71-74.
[4]段齊駿,邱亞鋒,張福祥.艦載武器裝備發(fā)射精度與載體運(yùn)動關(guān)系研究[J].彈道學(xué)報,2000,12(2):60-64.
[5]岳江鋒.印度導(dǎo)彈及航天發(fā)射失敗的原因及影響[J].國防科技工業(yè),2006,9:54-56.
[6]閻紹澤,申永勝,陳洪彬.考慮桿件柔性和鉸間隙的可展結(jié)構(gòu)動力學(xué)數(shù)值模擬[J].清華大學(xué)學(xué)報(自然科學(xué)版),2003,43(2):145-149.
[7]陶堯森.船舶耐波性[M].上海:上海交通大學(xué)出版社,1996.
[8]趙龍波,石德平,敖百強(qiáng).海清對艦空導(dǎo)彈離軌姿態(tài)的影響分析及補(bǔ)償方法[J].現(xiàn)代防御技術(shù),2008,36(6):81-85.