基于反饋線性化的風(fēng)輪機變槳距控制研究
2011-07-20 03:59:10紀(jì)志成馮海英沈艷霞
微特電機 2011年11期
紀(jì)志成,馮海英,沈艷霞
(江南大學(xué),江蘇無錫214122)
0 引 言
風(fēng)能是一種有效的清潔能源,隨著能量需求的日益增加,風(fēng)機容量日益擴大,變速恒頻風(fēng)力發(fā)電機組的研究已成為國內(nèi)外相關(guān)領(lǐng)域的研究熱點[1-2]。
早期主要研究低風(fēng)速下風(fēng)力機的控制策略及運行目標(biāo):低于額定風(fēng)速運行時,風(fēng)輪應(yīng)跟蹤最佳葉尖速比,實現(xiàn)風(fēng)能的最大功率動態(tài)跟蹤;高于額定風(fēng)速時,采用變槳控制策略,將轉(zhuǎn)速恒定在額定值附近并維持輸出功率穩(wěn)定。然而,風(fēng)速波動范圍較寬,空氣的氣動力特性,隨機機械阻尼的影響以及柔性結(jié)構(gòu)的傳動鏈等因素是系統(tǒng)控制困難的原因[3]。
文獻[4]以變槳控制為目標(biāo),通過反饋控制器觀察轉(zhuǎn)速信號,設(shè)計了魯棒控制器;文獻[5]用神經(jīng)網(wǎng)絡(luò)法對風(fēng)電系統(tǒng)進行進一步分析控制,對比了MLP和RBF神經(jīng)網(wǎng)絡(luò)的控制特性;文獻[6]提出了變速恒頻風(fēng)力發(fā)電轉(zhuǎn)速非線性PID控制,它具有一定的適應(yīng)性和魯棒性;文獻[7]提出模糊PI變槳距控制法,并與變增益法和基于機械轉(zhuǎn)矩觀測器的控制增益法等控制方案進行了比較分析;此外,自適應(yīng)控制、模糊神經(jīng)網(wǎng)絡(luò)、變論域自適應(yīng)、灰色預(yù)測、數(shù)據(jù)驅(qū)動等先進控制方法也是常用的變槳距控制方法[8-10]。
由于風(fēng)能的氣動效應(yīng)及隨機性等特點,傳統(tǒng)的控制方法已難于實現(xiàn)高精度控制,并且輸出電能質(zhì)量較差。為了改善系統(tǒng)在高于額定風(fēng)速運行區(qū)域內(nèi)的動態(tài)性能,變速恒頻風(fēng)力發(fā)電已成為一種主導(dǎo)趨勢,該系統(tǒng)具有強非線性、動態(tài)過程較快等特點。本文根據(jù)風(fēng)力發(fā)電機組的模型,將風(fēng)輪機模型進行精確反饋線性化,并設(shè)計最優(yōu)控制器,通過仿真得到波形,對比開環(huán)性能,論證了漿距角控制的重要性,并對改變參數(shù)進行了比較分析。
1 風(fēng)力發(fā)電機組模型
1.1 風(fēng)輪機模型
風(fēng)輪機從自然風(fēng)能中吸取能量的大小程度用風(fēng)能利用系數(shù)Cp來表示[11]:
作為風(fēng)力機組的關(guān)鍵部件的一部分,風(fēng)輪機將槳葉捕獲的風(fēng)能轉(zhuǎn)換為傳遞到輪轂上的機械轉(zhuǎn)矩。其動態(tài)方程:

式中:Tgen為發(fā)電機的電磁轉(zhuǎn)矩,為便于分析,本文設(shè)為定值;J為風(fēng)輪轉(zhuǎn)動慣量;Taero為風(fēng)給的風(fēng)輪動力矩,為整個機組的驅(qū)動力矩;Taero可表示:

式中:P為風(fēng)輪機實際獲得的軸功率。
不同于額定風(fēng)速以下采用的最大葉尖速跟蹤調(diào)節(jié),額定風(fēng)速以上時,系統(tǒng)主要采用變槳距調(diào)節(jié)這一復(fù)雜動態(tài)過程,將系統(tǒng)輸出功率保持在額定值附近。為便于分析,本文采用直驅(qū)式傳動系統(tǒng)。
1.2 槳距角的執(zhí)行機構(gòu)
槳距角的執(zhí)行機構(gòu)為一階慣性環(huán)節(jié):

式中:Tβ為變槳伺服系統(tǒng)的時間常數(shù);β是執(zhí)行機構(gòu)的輸出,即槳距角的實際值;βr為參考槳距角,是控制器輸出的給定值。一般來講,Tβ很小,β可以很快跟蹤到βr。
1.3 測速裝置
由于存在滯后,用一個一階慣性環(huán)節(jié)來表示:

式中:ωrm是利用速度傳感器得到的風(fēng)力機角速度;Tω為系統(tǒng)的時間常數(shù)。
1.4 全局模型
由以上分析可得,該系統(tǒng)是三階的,狀態(tài)變量有測量轉(zhuǎn)速ωrm、風(fēng)輪機轉(zhuǎn)速ωr、槳距角β。
2 基于精確反饋線性化的變槳距控制器設(shè)計
2.1 精確反饋線性化
所謂狀態(tài)反饋線性化[12-13],就是在一定條件下,將一個仿射非線性系統(tǒng)通過非線性狀態(tài)反饋和恰當(dāng)?shù)淖鴺?biāo)變換進行精確線性化,用得到的狀態(tài)反饋維持控制系統(tǒng)的平穩(wěn)性,提高系統(tǒng)的動態(tài)性能。由于它精確對消了系統(tǒng)的非線性特性,該方法又被稱作精確反饋線性化。
狀態(tài)反饋線性化可應(yīng)用于如式(8)的單輸入單輸出仿射非線性系統(tǒng):


式中:f(X)及g(X)為狀態(tài)空間中n維向量場;u∈Rl為控制量;X∈Rn為狀態(tài)向量;h(X)為X的標(biāo)量函數(shù);y∈Rl為輸出量。
2.2 線性二次型最優(yōu)控制
對于線性控制系統(tǒng):

式中:A和B分別為n×n維狀態(tài)系數(shù)矩陣與n×m維控制系數(shù)矩陣,Z為n維狀態(tài)向量,V為m維控制向量,若矩陣[B|AB|A2B|…|An-1B]的秩為 n,則式(9)完全可控。對其提出二次型目標(biāo)函數(shù):

式中:R為正定m×m階權(quán)矩陣;Q為非負(fù)定n×n階權(quán)矩陣。由線性控制理論[14]得式(9)的最優(yōu)控制V(t)*:

的解。
利用Matlab 7函數(shù)“care()”求解代數(shù)黎卡提(Riccati)方程,使用方法如下:

式中:L是閉環(huán)狀態(tài)方程參數(shù)矩陣的特征值;P是求得的代數(shù)黎卡提方程的解;K為最優(yōu)反饋增益矩陣。
2.3 風(fēng)力機組模型的精確反饋線性化和最優(yōu)控制器設(shè)計
所以此系統(tǒng)的r=3,滿足進行精確反饋線性化變換的條件。
第二、選取合適的狀態(tài)反饋及變換坐標(biāo)。令φ:
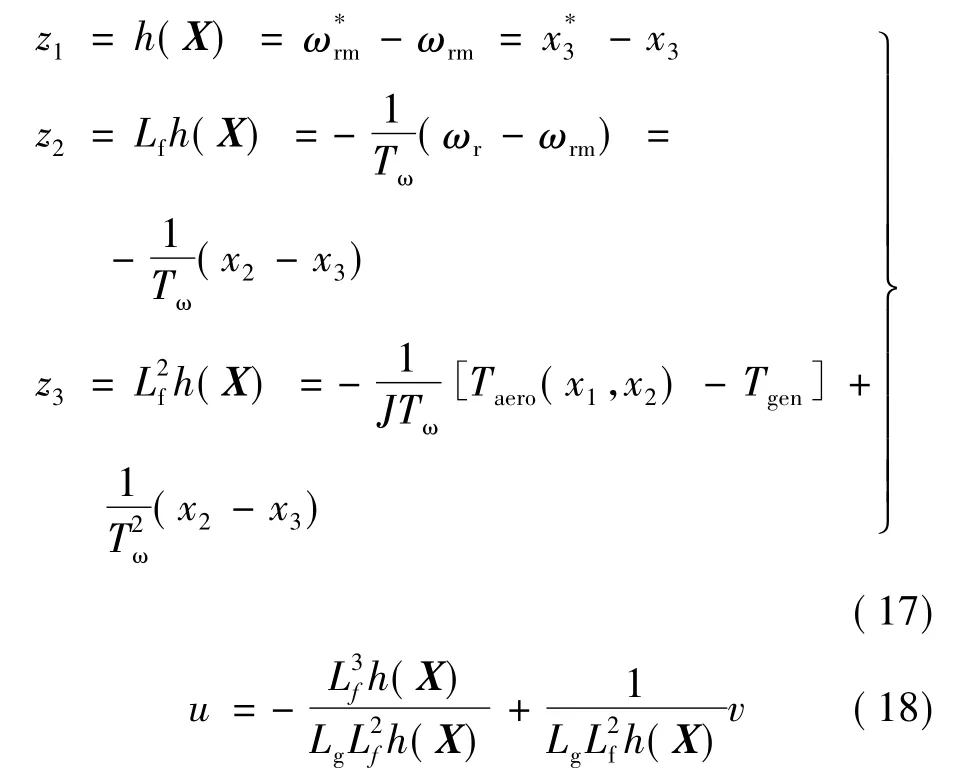
由式(18)可以看出,一旦v確定,控制量u也隨之確定,即βr確定,最優(yōu)控制器為確定v提供了途徑。
用控制器輸出的控制量來使性能指標(biāo)J達(dá)最小并保持較小的系統(tǒng)誤差是最優(yōu)控制的目的,從而實現(xiàn)能量和誤差的統(tǒng)籌最優(yōu)控制。因此使控制向量V:

此處,K*為最優(yōu)反饋增益矩陣,且有:

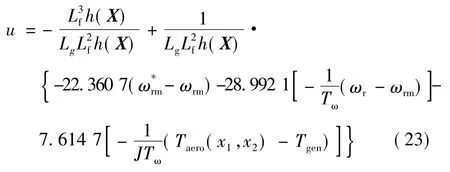
選取 R=1,Q=diag(500,500,0),由式(11)和式(20)用Matlab求解出:

結(jié)合式(19)得線性系統(tǒng)最優(yōu)控制量v:

結(jié)合式(18),可得所建的三階線性模型的狀態(tài)反饋控制律為:
3 系統(tǒng)仿真與分析
為了驗證本文所設(shè)計的精確反饋線性化和最優(yōu)控制器系統(tǒng)的正確性,本文用兩種風(fēng)速模擬并對風(fēng)電機組進行開環(huán)仿真。風(fēng)力發(fā)電機組的主要仿真參數(shù)如表1所示。
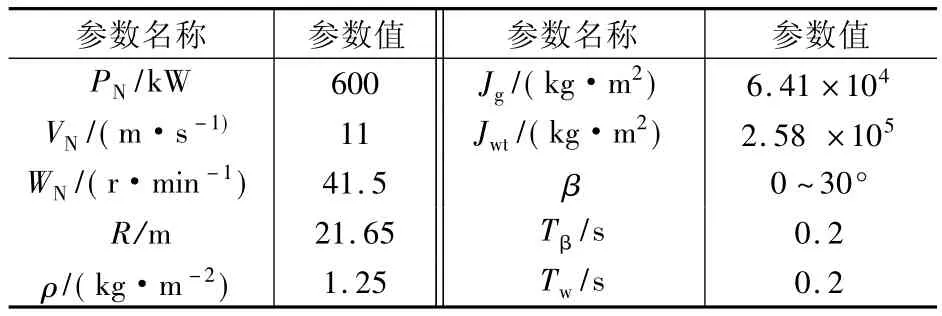
表1 仿真參數(shù)表
在不同風(fēng)速下,輸出功率和風(fēng)輪轉(zhuǎn)速的開環(huán)仿真結(jié)果如圖1和圖2所示。
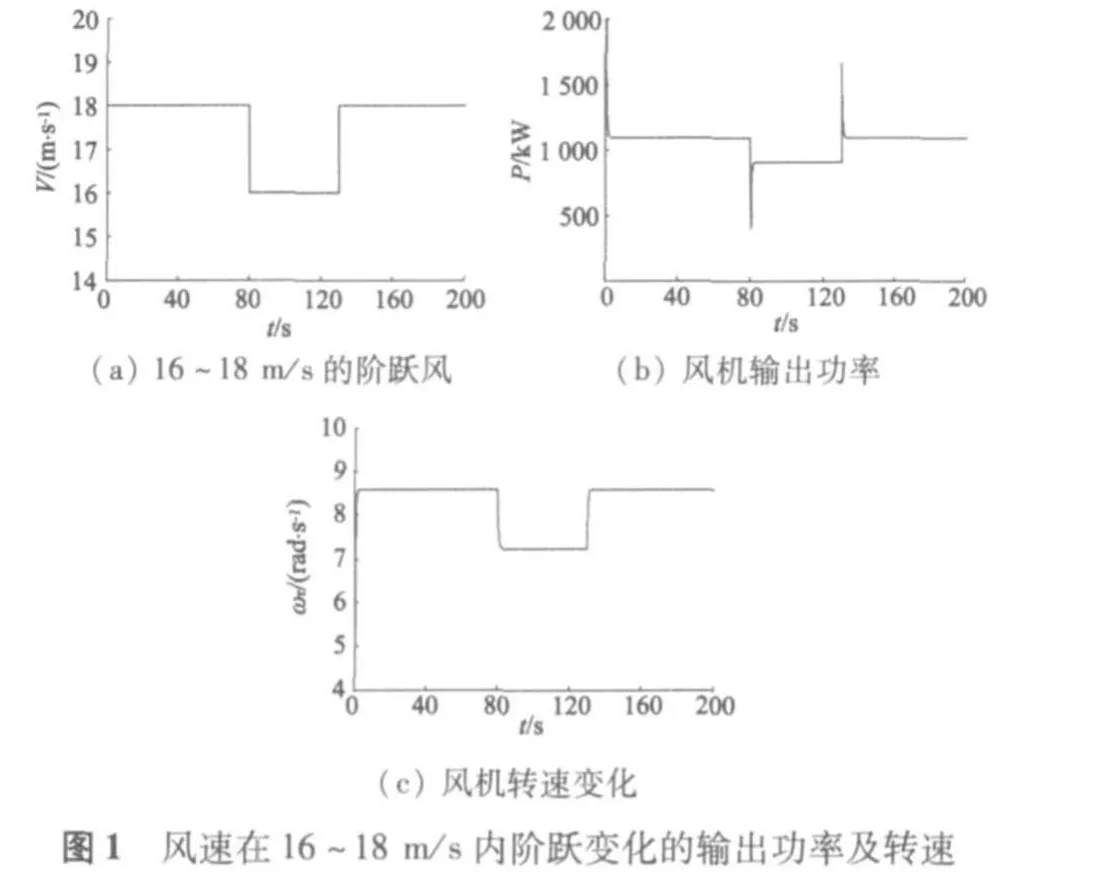
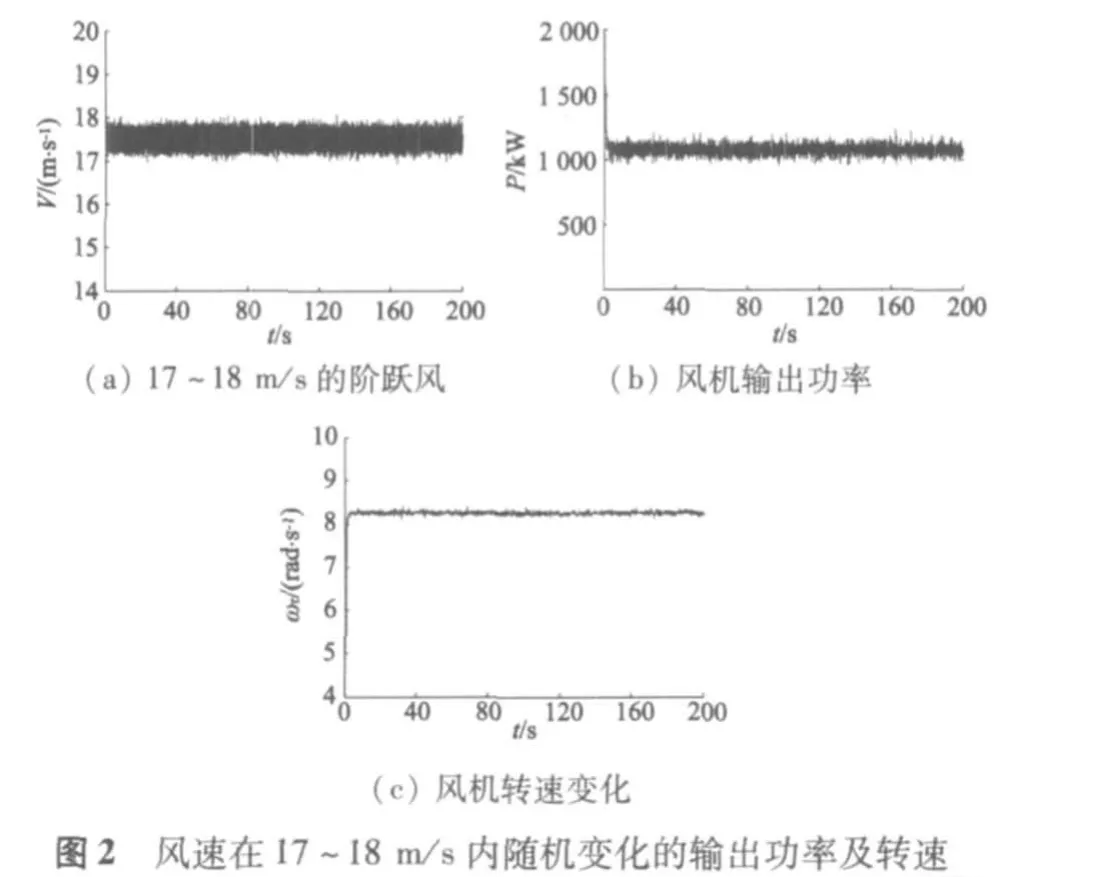
通過對上述結(jié)果的分析知道,當(dāng)風(fēng)電系統(tǒng)為開環(huán)控制時,其輸出功率和轉(zhuǎn)速難以保持在額定值附近,因此一個合適的控制器是必須的,只有風(fēng)力機的輸出功率保持在允許范圍內(nèi),發(fā)電機的恒定功率輸出才能實現(xiàn)。因此,額定風(fēng)速以上時的變槳距控制成為直驅(qū)型風(fēng)力發(fā)電系統(tǒng)的關(guān)鍵。
基于精確反饋線性化和最優(yōu)控制器的閉環(huán)仿真結(jié)果如圖3和圖4所示。
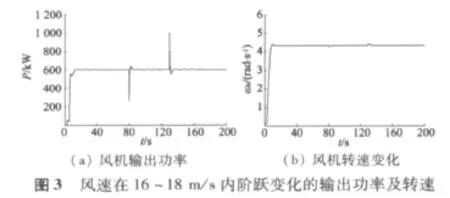
由圖3知,當(dāng)風(fēng)速在80 s處由18 m/s跳變到16 m/s時,風(fēng)力機轉(zhuǎn)速由4.34 rad/s迅速變?yōu)?.27 rad/s,相應(yīng)的輸出功率也變小,為防止其偏離額定值,變槳控制器動作,使輸出功率迅速回升至額定值;而當(dāng)風(fēng)速在130 s處回升至18 m/s時,為使風(fēng)能利用率減小,槳距角調(diào)節(jié),依然將輸出功率保持在額定值附近。
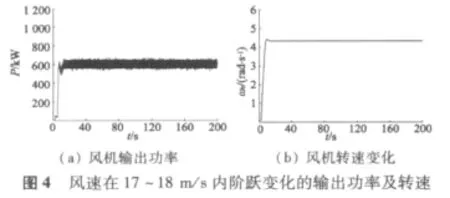
由圖4可得,當(dāng)風(fēng)速模型為隨機風(fēng)時,由于槳矩角控制器的及時調(diào)節(jié),改變風(fēng)能的功率系數(shù),從而風(fēng)力機的輸出功率被限定在允許的范圍內(nèi),并使轉(zhuǎn)速維持在額定值附近。但須指出的是,該控制策略在起始階段響應(yīng)較慢,穩(wěn)定性不夠好,這是有待進一步研究的內(nèi)容。
4 結(jié) 語
為提高變速恒頻風(fēng)力發(fā)電機組額定風(fēng)速以上的控制性能,本文在分析風(fēng)電機組不同風(fēng)速模型開環(huán)仿真結(jié)果的基礎(chǔ)上,提出反饋線性化的風(fēng)輪機變槳距控制方案,結(jié)合最優(yōu)控制器,從而使風(fēng)機功率和轉(zhuǎn)速值維持在額定值附近。仿真波形證明該控制方法對風(fēng)速和系統(tǒng)參數(shù)具有很好的魯棒性,并且具有較好的動態(tài)性能。
[1] 馬幼捷,尹向前,趙國華,等.變速恒頻雙饋風(fēng)電機組參數(shù)擾動對并網(wǎng)控制的影響[J].太陽能學(xué)報,2009,30(5):650 -654.
[2] Beltran B.Ahmed-Ali T.Sliding mode power control of variable- speed wind energy conversion system[J].IEEE Transactions on Energy Conversion,2008,23(2):551 -558.
[3] Senjyu T,Sakamoto R,Urasaki N,et al.Output power leveling of wind turbine generator for all operating regions by pitch angle control[J].IEEE Transactions on Energy Conversion,2006,21(2):467-475.
[4] Takaai H,Chida Y,Sakurai K,et al.Pitch Angle Control of Wind Turbine Generator using Less Conservative Robust Control[J].IEEE International Conference on Control Applications,2009,7(18):542-547.
[5] Yilmaz A S,Ozer Z.Pitch angle control in wind turbines above the rated wind speed by multi-layer perceptron and radial basis function neural networks[J].Expert Systems with Applications,2009(36):9767-9775.
[6] 趙永祥,夏長亮,宋戰(zhàn)鋒,等.變速恒頻風(fēng)力發(fā)電系統(tǒng)風(fēng)機轉(zhuǎn)速非線性PID控制[J].中國電機工程學(xué)報,2008,28(11):133-138.
[7] Cardenas- Dobson R,Asher G M.Power limitation in variable speed wind turbines using pitch control and mechanical torgue observer[J].Wind Engineering,1996,20(6):363 -386.
[8] 郭慶鼎,趙麟,郭洪澈.1MW變速變距風(fēng)力發(fā)電機的滑模變結(jié)構(gòu)魯棒控制[J].沈陽工業(yè)大學(xué)學(xué)報,2005,27(2):171 -174.
[9] 劉新海,于書芳.神經(jīng)網(wǎng)絡(luò)在大型風(fēng)力發(fā)電機電控系統(tǒng)中應(yīng)用[J].微特電機,2004,32(2):37 -42.
[10] 張新房,徐大平,呂躍剛,等.大型變速風(fēng)力發(fā)電機組的自適應(yīng)模糊控制[J].系統(tǒng)仿真學(xué)報,2004,16(3):573 -577.
[11] 夏長亮,宋戰(zhàn)鋒.變速恒頻風(fēng)力發(fā)電系統(tǒng)變槳距自抗擾控制[J].2007,27(14):91 -95.
[12] 盧強,孫元章.電力系統(tǒng)非線性控制[M].北京:科學(xué)出版社,1993,10 -60.
[13] 賀昱曜,閆茂德.非線性控制理論及應(yīng)用[M].西安:西安電子科技大學(xué)出版社,2007,20 -36.
[14] 胡壽松,王執(zhí)銓,胡維禮.最優(yōu)控制理論與系統(tǒng)[M].北京:科學(xué)出版社,2005.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
電機與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
西南交通大學(xué)學(xué)報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06
