基于DSP的智能無刷直流電機控制策略研究
2011-07-10 06:54:52隨順科孫長江
制造業自動化 2011年15期
關鍵詞:檢測
隨順科,孫長江,王 雁
(中國礦業大學 信息與電氣工程學院,徐州 221116)
0 引言
無刷直流電機是在有刷直流電機的基礎上發展起來的,使用了電子換相原理的無刷直流電機具有結構簡單、運行效率高、無勵磁損耗以及調速性能好等眾多優點被廣泛應用于運動控制等領域。無刷直流電機控制器則經歷了從分立元件的模擬電路,專用集成電路到全數字化控制電路的發展過程。隨著微處理器技術的發展,采用以數字信號處理器為核心的控制技術,運用智能控制理論為代表的控制策略,將實現對無刷直流電機數字化、智能化控制。
1 總體硬件設計
1.1 無刷直流電機的組成
無刷直流電機結構原理如圖1所示,它主要由電機本體、位置傳感器和電子換相器三部分組成。電機本體由轉子和定子組成,轉子由呈弧形的永磁鋼按照一定的極對數組成,定子繞組一般分成三相且多使用整距集中式繞組,磁極下定轉子氣隙均勻,氣隙磁通密度呈梯形分布。位置傳感器安裝在定子線圈的相應位置上,在直流無刷電機中起著檢測轉子磁極位置的作用。電子換相
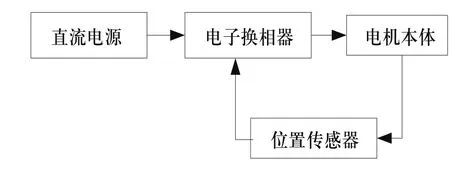
圖1 無刷直流電機結構原理圖
器主要由功率開關和位置信號處理電路組成,用來控制定子各繞組通電的順序和時間。
1.2 控制系統硬件設計
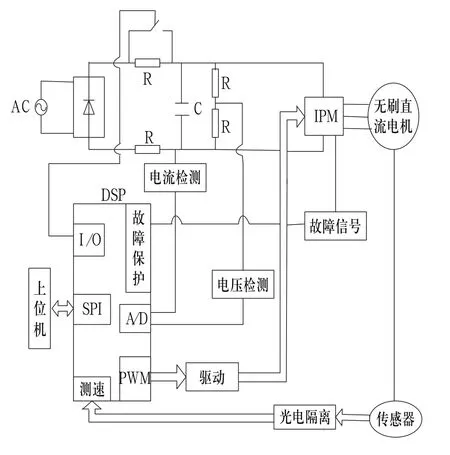
圖2 無刷直流電機控制系統硬件結構原理圖
基于DSP的無刷直流電機總體硬件構成如圖2所示,主要由DSP及外圍電路、功率驅動電路、保護電路及反饋檢測電路等構成。DSP主控電路以TMS320LF2407A為控制核心,它是TI公司推出的一款功能較為齊全的16位定點數字信號處理器。能夠完成對各種信號的處理和系統的閉環控制,并且利用SCI接口實現控制器與上位機的通訊。整個控制系統的工作原理如下:在電機以一定方式啟動后采用PWM方式實現對無刷直流電機進行閉環控制,閉環調節過程中輸入交流經過整流電路形成直流,穩壓后向逆變電路提供直流電源。而給定的轉速則由DSP的I/O口輸入,經A/D轉換將模擬信號轉化成數字信號。位置信號用于控制換相,由位置參數計算出電機轉速,與給定轉速比較,修正偏差產生的電流參考量與電流反饋量作比較,這樣就可以通過調節脈沖寬度改變控制功率管的開關時間,從而實現對無刷直流電機的控制。
下面針對DSP外圍電路中的PWM驅動電路設計過程進行詳細闡述。主電路中逆變器采用的是集成了驅動與保護電路的智能功率模塊IPM,使得DSP和IPM的驅動電路和接口變得簡單。DSP芯片的PWM輸出電平為3.3V,由于受到驅動能力的限制,所以選用6緩沖驅動芯片74LS07,然后直接驅動光耦組成IPM驅動隔離電路。圖3為PWM輸出框圖。
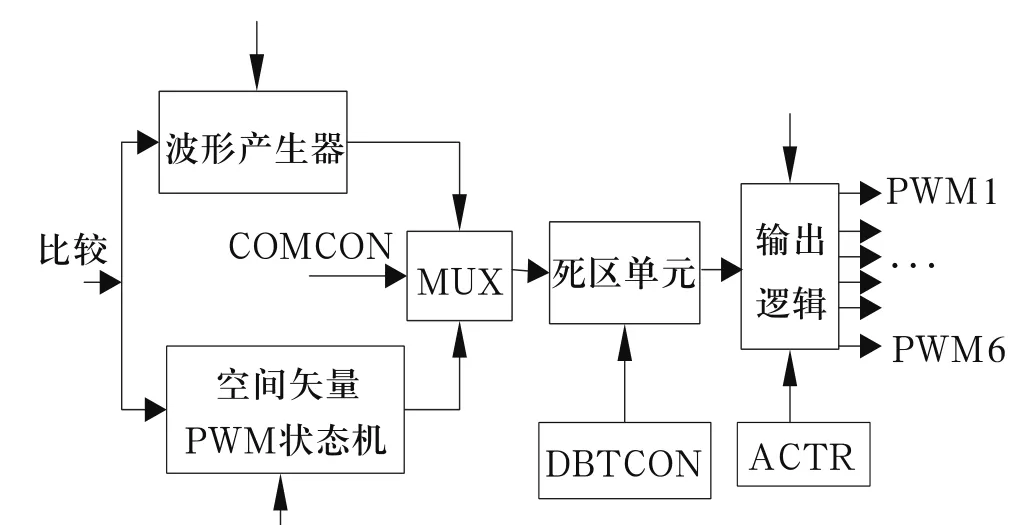
圖3 PWM輸出框圖
功率驅動電路的作用是將控制電路輸出的脈沖信號進行功率放大,以完成對MOSFET或IGBT的驅動。本文選取三相橋式驅動器IR2130,它可以在低于600V的電路中工作,且具有欠壓保護和過流保護等功能。
直流電源電壓過高或過低都可能影響電機的正常工作。電壓過高會損壞功率器件和電機本體。而電源電壓過低會引起電流增大使開關損耗增加。為保證系統的安全可靠運行,系統中設計了欠壓、過壓保護電路。圖4為過壓保護電路,直流電源電壓經分壓電路輸入到比較器的同相輸入端,比較器的反相輸入端接固定的電壓閥值。將電壓值與設定的閥值作比較,電壓正常時,比較器輸出低電平。當電壓過高時,比較器輸出高電平。此時控制器立刻停止電機運行,保護系統安全。同樣可以調整分壓阻值,將該電路設計為欠壓保護電路。
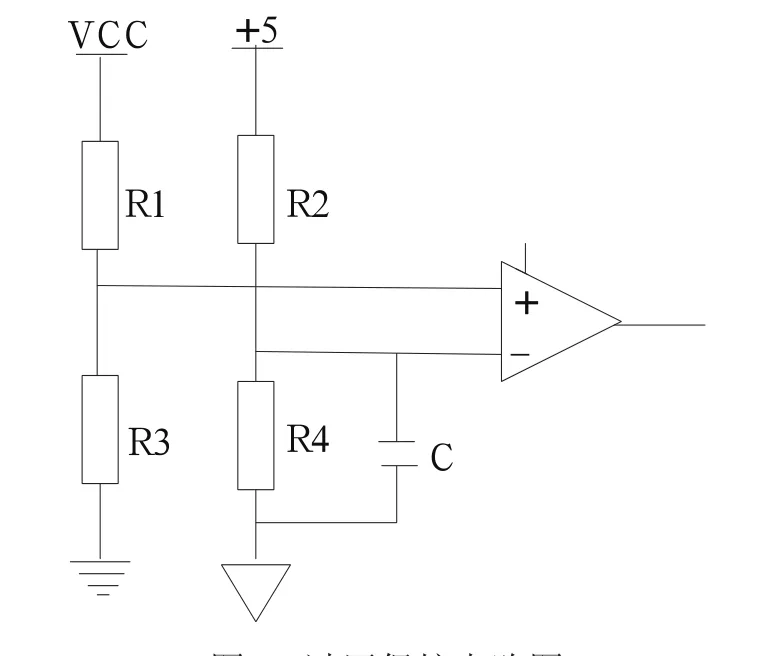
圖4 過壓保護電路圖
檢測電路包括電流檢測和電壓檢測,下面主要對電流檢測進行設計。本設計中電流檢測主要用于電機定子電流反饋調節。圖5為電流檢測電路。通過檢測電阻兩端的電壓降,檢測出電阻兩端的電壓,然后就可以得出流過電阻的電流。
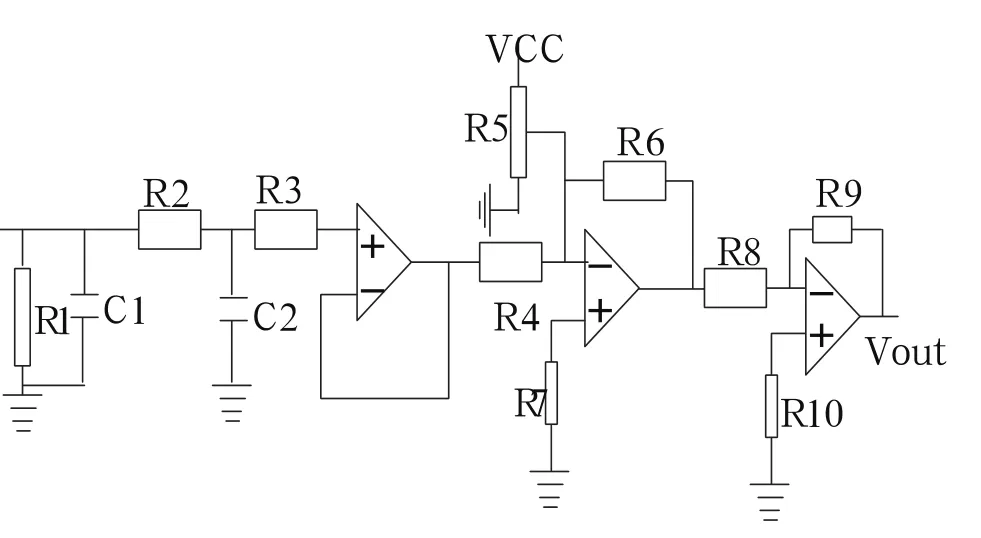
圖5 檢測電流電路圖
2 控制系統軟件設計
2.1 系統軟件設計
系統軟件的功能就是控制設計好的硬件電路,使其能夠按照預定的流程,進行工作。為了能夠適應復雜多變的運行環境,本文引入遺傳優化的模糊PID控制算法,使調節過程具有自適應、自組織等智能特性。速度環使用遺傳優化的模糊PID控制,給定速度與速度反饋形成偏差 ,相鄰采樣周期之差形成偏差變化率 ,利用偏差和偏差變化率查詢控制規則表,實現對轉速的控制調節。
圖6為控制系統總體流程圖。系統得電后,DSP存儲單元和部分寄存器先初始化,等到電壓穩定時等候電機啟動指令的輸入。當有啟動指令時則進行啟動初始化,然后設置預定位步長和發送功率電路控制脈沖,當預定位子程序結束時電機轉子恰好處于一個確定位置,隨著轉速的升高,反電動勢達到一定值,這樣通過反電動勢過零信號就可以檢測出轉子位置,這樣根據檢測的速度和位置信號對電機進行閉環調速。有保護中斷信號或停止信號時,電機關斷主電路,停止運行。
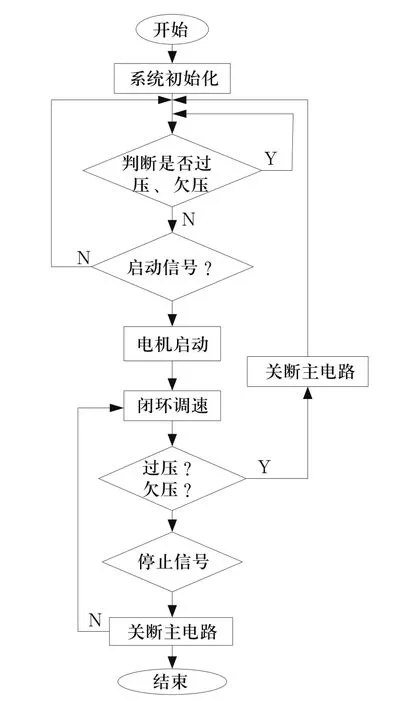
圖6 控制系統總體流程圖
轉速控制子程序流程如圖7所示,這個過程中需要量化檢測到的偏差e(k)和偏差變化Δe(k),控制規則表事先根據專家經驗設計出了一個初始規則表,為了能夠控制的更加精準,本文又引入了遺傳算法對規則表進行優化,實現自適應控制。
2.2 仿真驗證
本文利用Matlab建立了控制系統仿真模型。圖8為遺傳模糊PID控制下的轉速響應曲線,在遺傳模糊PID控制下,系統在很短時間進入穩態,在t=0.6秒時加負載,轉速發生突降,但很快又恢復到平衡狀態。
3 結束語
由于DSP芯片具有運算快、擴展性強等特點,使用DSP芯片控制無刷直流電機,大大簡化了硬件電路的設計,提高了系統的可靠性,增強了系統控制的快速性和靈活性。引入遺傳模糊PID控制算法,使控制器能夠自適應的根據系統的運行狀態對參數進行調整,提高了系統的響應速度和控制精度,使系統更加穩定。
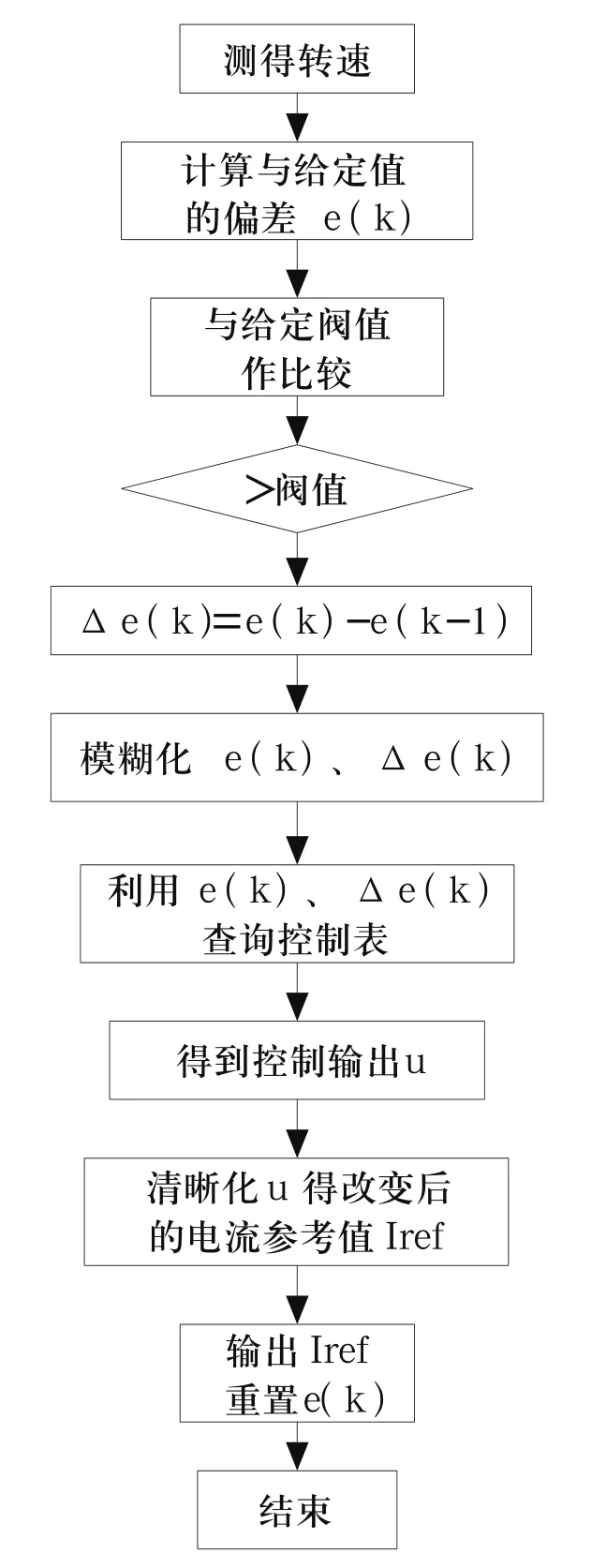
圖7 調節轉速子程序流程圖

圖8 遺傳模糊PID控制轉速響應曲線
[1] 杜坤梅.電機控制技術[M].哈爾濱:哈爾濱工業大學出版社,2002.
[2] 王春民,喬瑞芳.基于DSP和IPM的三相無刷直流電機控制系統[J].吉林大學學報,2007(l):62-67.
[3] 吳雪梅,景占榮,史永奇.基于DSP的直流無刷電機控制技術研究[J].機械與電子,2005(3):50-52.
[4] 張興全.基于DSP的無刷直流電機控制系統研究[D].哈爾濱工程大學自動化學院,2008.
[5] 王曉明,王玲.電動機的DSP控制[M].北京:北京航空航天大學出版社,2004.
[6] K.Y.Cheng,Y.T.Lin,C.H.Tso and Y.Y.Tzou,"Design of a Sensorless Conlnnutation IC for BLDC Motors"2002 IEEE Annual Power Eleetronics Specialists Conference,2002,7:23-37.
[7] 陳隆呂.控制電機[M].西安:西安電子科技大學出版社,2003.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
