25 V/5 A太陽能直流穩(wěn)壓電源的設(shè)計
2011-07-03 06:38:16王朕楊林史賢俊
船電技術(shù) 2011年10期
關(guān)鍵詞:信號
王朕 楊林 史賢俊
(海軍航空工程學(xué)院控制工程系,山東 264001)
1 引言
對于經(jīng)常在野外進行訓(xùn)練的野戰(zhàn)部隊,如果所處地區(qū)無電力供應(yīng)設(shè)施,就會因為備用電源供電不足而影響訓(xùn)練。太陽能是一種資源豐富,既可免費使用又無須運輸且對環(huán)境無任何污染的清潔能源。隨著微電子技術(shù)的發(fā)展,充分利用太陽能變換成穩(wěn)定電源已經(jīng)成為解決野外用電的一種可靠方法。
針對某型野外電臺供電電壓精度高、紋波小、可靠性高的要求,本文采用高速微處理器DSP TMS320LF2407A設(shè)計了一款25 V/5 A太陽能直流穩(wěn)壓電源。該電源在正常情況下充分利用太陽能供電,應(yīng)急情況下可使用車載蓄電池進行供電,數(shù)字調(diào)節(jié)器的使用使得供電電壓精度指標和紋波指標得到極大提高,部隊?wèi)?yīng)用證明設(shè)計的電源完全達到了設(shè)計要求。
2. 穩(wěn)壓電源的設(shè)計
單塊太陽能電池板的最高輸出電壓為 17.5 V,本文設(shè)計的電源采用兩塊電池板串聯(lián)使用,使最高輸出電壓和最低輸出電壓分別達到 35 V和10 V。穩(wěn)壓電源的原理框圖如圖1所示。
太陽能電池板發(fā)出的10 V~35 V直流電壓經(jīng)DC/DC調(diào)節(jié)器調(diào)節(jié),再經(jīng)過穩(wěn)定蓄能電路得到一個穩(wěn)定可靠的12 V直流穩(wěn)壓電源,該直流電經(jīng)推挽式變換器得到一個高頻方波交流電源,該電源經(jīng)全橋式整流電路整流并濾波后得到所需要的25 V/5 A直流穩(wěn)壓電源。輸出電壓經(jīng)隔離采樣、信號調(diào)理后輸入DSP。DSP 對采樣信號經(jīng)數(shù)字調(diào)節(jié)器處理后輸出PWM控制信號,使輸出電壓快速穩(wěn)定在設(shè)定的期望值上。通過電壓、電流、溫度等各種檢測信號的AD轉(zhuǎn)換向DSP提供必要的保護信號,使得電源能保持輸出電壓穩(wěn)定的同時實現(xiàn)過壓保護、欠壓保護、過流保護、過熱保護和短路保護等功能。

圖1 穩(wěn)壓電源原理框圖
2.1 主電路設(shè)計
如圖2所示,穩(wěn)壓電源的主電路由太陽能電池板、DC/DC調(diào)節(jié)器[1]、穩(wěn)定蓄能電路、推挽式變換器[2]、全橋整流電路、濾波穩(wěn)壓電路和采樣電路組成。太陽能電池板輸出的電壓經(jīng) DC/DC調(diào)節(jié)器調(diào)節(jié)、穩(wěn)定蓄能電路穩(wěn)壓后得到穩(wěn)定可靠的12 V直流電壓,該指直流電壓經(jīng)推挽式變換器變換后得到高頻方波交流電源,該交流電源經(jīng)橋式整流電路和濾波穩(wěn)壓電路后得到穩(wěn)定的高精度25 V直流電源。采樣電路實現(xiàn)對輸出電壓和輸出電流的采樣,采樣信號經(jīng)信號調(diào)理后輸入DSP。其中電壓采樣信號用來與給定值比較,經(jīng)數(shù)字調(diào)節(jié)器后改變推挽式變換器開關(guān)管驅(qū)動脈沖的占空比,從而調(diào)節(jié)輸出電壓;電流采樣信號用來實現(xiàn)過流保護。根據(jù)開關(guān)管溫度的采樣信號實現(xiàn)過熱保護,熔斷絲FUSE實現(xiàn)短路保護,二極管VD2防止因 DC/DC調(diào)節(jié)器輸出電壓過低出現(xiàn)蓄電池反流現(xiàn)象。
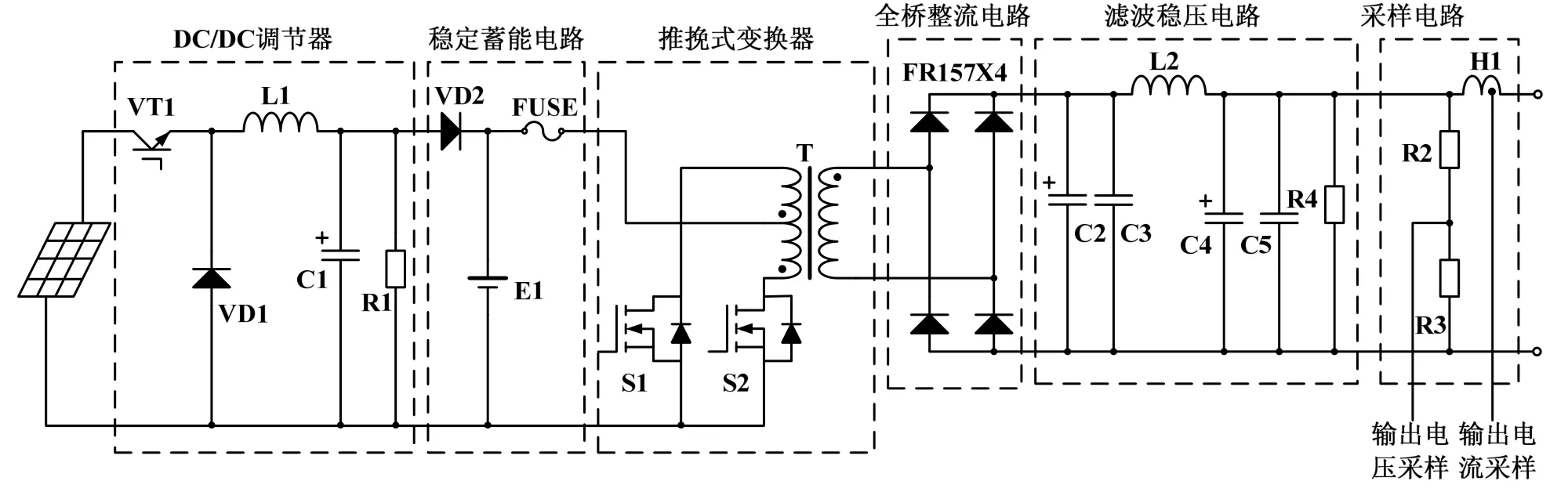
圖2 穩(wěn)壓電源主電路原理圖
2.2 控制電路設(shè)計
2.2.1 控制電路原理設(shè)計
TMS320LF2407A是一款高速數(shù)字信號處理芯片,芯片上集成了多種先進的外設(shè),利用其EV事件管理模塊中的全比較單元,可方便地產(chǎn)生 4路帶有可變成死區(qū)和輸出極性的PWM波。PWM波形的產(chǎn)生用到通用定時器(提供時間基準)、非對稱波形發(fā)生器、可編程的死區(qū)發(fā)生單元、不對稱波形發(fā)生單元、輸出邏輯控制單元以及空間矢量PWM產(chǎn)生單元,適當(dāng)設(shè)置比較單元的寄存器,可方便地生成所需要的PWM或SPWM波形。
產(chǎn)生PWM波形的總體思路如下:利用DSP的EVA模塊,當(dāng)定時器T1處于連續(xù)遞增/遞減計數(shù)模式時,計數(shù)寄存器(T1CNT)中的數(shù)值變化軌跡就形成了一系列等腰三角波,當(dāng)比較寄存器(CMPRx,x=1,2,3)中的值與計數(shù)寄存器中的值相等時,對應(yīng)的引腳(PWMx,x=1,2,3,4)上的電平就會產(chǎn)生跳變,從而產(chǎn)生一些列等高的方波信號。輸出方波的寬度有比較寄存器中的值決定,因此只要使比較寄存器中的值是期望得到的穩(wěn)定值(常數(shù)),即可得到所需的PWM波形。為保證死區(qū)時間,輸出的PWM波形占空比最大不超過40%。

圖3 控制電路原理圖
控制電路原理如圖3所示,PWM1信號用來驅(qū)動 DC/DC型調(diào)節(jié)器,使輸出電壓基本穩(wěn)定在12 V,PWM2和PWM3信號用來驅(qū)動推挽式變換器開關(guān)管;輸出電壓采樣信號與給定的直流電壓信號進行比較,根據(jù)比較結(jié)果調(diào)整 PWM2和PWM3的占空比,使輸出電壓穩(wěn)定于25 V;輸出電流采樣數(shù)據(jù)用來判別是否發(fā)生過流故障,溫度采樣數(shù)據(jù)用來判別是否發(fā)生過熱故障,直流電壓采樣信號用來判別是否有過壓和欠壓故障;根據(jù)采樣信號實施相應(yīng)的保護。
設(shè)計的穩(wěn)壓電源中,高速光耦隔離電路采用三片TLP251集成驅(qū)動器,電流采樣采用集成電流傳感器UCC3926,溫度采樣采用低電壓輸出集成溫度傳感器TMP35[3]。電壓、電流、溫度采樣信號經(jīng)調(diào)理后輸入DSP。
2.2.2 數(shù)字調(diào)節(jié)器設(shè)計
輸出電壓不僅要有精度高、紋波小,還要有良好的動態(tài)特性和穩(wěn)態(tài)特性。采用PID控制中應(yīng)用廣泛的增量式算法設(shè)計了數(shù)字調(diào)節(jié)器。由于DSP僅能根據(jù)采樣時刻的偏差值計算控制量,因此,連續(xù)PID控制算法需要離散化,即數(shù)字PID調(diào)節(jié)器。采用離散PID算法時,表達式為:

式中:Kp,Ki,Kd分別為比例、積分和微分系數(shù)。
當(dāng)采用離散PI算法時,表達式變?yōu)椋?/p>

考慮到因日照強度變化或負載突變會引起輸入或輸出電壓變化等因素,剛開始工作或負載突變時,采用PI算法調(diào)節(jié),使輸出電壓盡快穩(wěn)定在額定輸出電壓上,當(dāng)輸出電壓達到額定值時采用PID算法,提高輸出電壓的穩(wěn)定性。程序在積分調(diào)節(jié)階段,可根據(jù)偏差大小對比例、積分系數(shù)調(diào)整,這樣極大提高了輸出電壓的精度和穩(wěn)定性[4]。
2.3 軟件設(shè)計
主程序流程如圖 4(a)所示,系統(tǒng)初始化后,首先對穩(wěn)壓蓄能電路的直流電壓進行采樣,與DSP內(nèi)固化的數(shù)據(jù)比較,輸出 DC/DC調(diào)節(jié)器的PWM 驅(qū)動信號,直到該直流電壓達到設(shè)定值;然后對穩(wěn)壓電源的輸出電壓進行采樣,與給定的參考值相比較輸出開關(guān)管的PWM驅(qū)動信號,當(dāng)輸出電壓達到25 V時,DSP鎖定此時驅(qū)動信號占空比,進入閉環(huán)工作狀態(tài);當(dāng)輸出電壓改變時,調(diào)整DSP的控制值,改變驅(qū)動信號占空比,使輸出電壓快速恢復(fù)至25 V[5]。同時通過對直流電壓、輸出電流、溫度采樣數(shù)據(jù)的處理,適時關(guān)斷PWM驅(qū)動信號的輸出,完成過壓、欠壓、過流及過熱保護,提高電源可靠性。
生成PWM驅(qū)動信號的程序流程如圖4(b)所示,其程序是一個無限循環(huán)結(jié)構(gòu),主要是計算比較寄存器的值,并根據(jù)該值生成PWM波。

圖4 軟件程序流程
3 實驗數(shù)據(jù)和實驗波形
根據(jù)設(shè)計要求確定穩(wěn)壓電源的主要參數(shù)如下:太陽能電池板輸入直流電壓12 V~35 V,變壓器效率 95%,變壓器磁芯選用 EI35×27×10,變壓器初級線圈 12匝,初次級繞組匝比 0.4:1,變換器工作頻率 28 kHz,驅(qū)動信號占空比25%~45%,輸出濾波電感0.25 mH,濾波電容為300 μF,輸出電壓直流25 V,最大輸出電流5 A。負載不同時輸出電壓及紋波峰峰值電壓見表 1,空載和滿載時驅(qū)動脈沖及輸出電壓波形見圖5。
表1的測試結(jié)果表明,當(dāng)電源由空載變換到滿載時,電壓的變換僅有0.14 V,而輸出紋波電壓的峰峰值最大僅有0.94 mV。同時當(dāng)負載由1 A突變?yōu)? A時,用示波器讀出的輸出電壓穩(wěn)定時間僅有0.2 s。圖5表明,電源在空載和滿載時,輸出電壓都能穩(wěn)定在25 V,開關(guān)管驅(qū)動信號的占空比也小于45%,完全達到了設(shè)計要求。
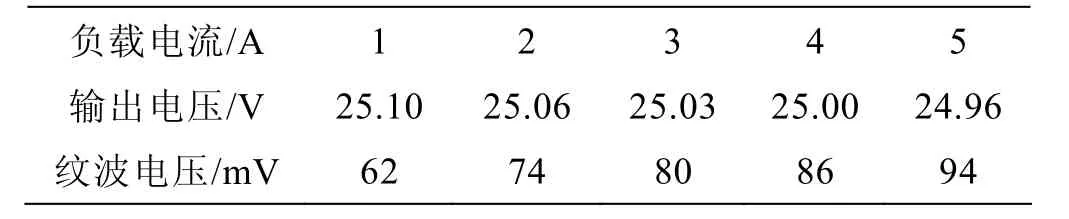
表1 不同負載時輸出電壓及紋波峰峰值電壓
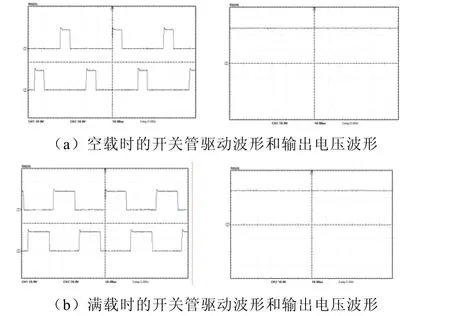
圖5 空載和滿載時開關(guān)管的驅(qū)動波形和輸出電壓波形
4 結(jié)束語
針對某型電臺供電要求,采用TMS320LF2407A高速數(shù)字信號處理器設(shè)計實現(xiàn)了25 V/5 A太陽能穩(wěn)壓電源。實際應(yīng)用表明該電源具有穩(wěn)壓精度高、穩(wěn)態(tài)性能好、動態(tài)響應(yīng)快、可靠性高等優(yōu)點,同時,該電源對利用太陽能發(fā)電的同類產(chǎn)品也具有很好的參考價值。
[1]Muhammad H.Rashid(編),陳建業(yè)等(譯). 電力電子技術(shù)手冊[M]. 北京:機械工業(yè)出版社,2004.
[2]王全保. 新編電子變壓器手冊[M]. 沈陽:遼寧科學(xué)技術(shù)出版社,2007.
[3]張偉, 張瑾等. 新編使用集成電路選型手冊[M]. 北京:人民郵電出版社,2008.
[4]陶永華, 尹怡欣, 葛蘆生. 新型 PID 控制及其應(yīng)用[M]. 北京:機械工業(yè)出版社, 2002.
[5]姜向龍, 尹泉, 趙金, 萬淑蕓. 基于 DSP控制器的一種死區(qū)補償策略[J]. 電力電子技術(shù), 2005(4).
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06