魚雷直流電機斬波調速系統設計
2011-07-03 06:38:16雷毅何萬國
船電技術 2011年10期
關鍵詞:系統
雷毅 何萬國
(海軍駐中國艦船研究設計中心軍事代表室, 武漢 430064)
1 引言
目前我國電動魚雷推進直流電機均采用雙速制方式,利用電池組的串并聯實現魚雷兩種速度的航行[1],這種方法的主要缺陷是由于無法實現魚雷航行中機動變速,既不能實現魚雷彈道的最佳控制性能,也不能最大限度地利用有限的能源增大魚雷航程,難以滿足日益需求的魚雷戰術要求。而電動魚雷采用無級變速,使魚雷在線導階段,操作者可根據噪聲掩蓋和目標運動情況實時改變航速,以保證對目標的穩定跟蹤;在自導階段,魚雷根據目標狀態、目標信號強度和魚雷自噪聲等原因自動調整航行速度,可以獲得最佳的戰術攻擊效果,并能有效地利用魚雷能源,提高魚雷航程。因此,實現電動魚雷的無極變速,成為世界各魚雷生產國投入大量的財力,進行該項魚雷高新技術的開發和研究。
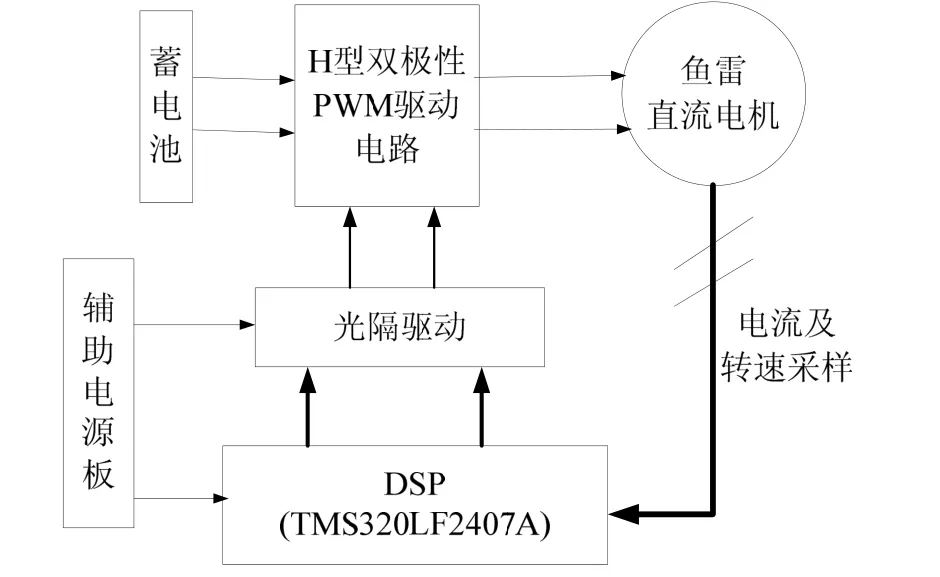
圖1 魚雷推進電機斬波調速系統結構框圖
文中提出的魚雷推進電機斬波調速系統是采用TMS320LF2407A為控制核心、H橋式直流斬波驅動、電流內環 PI調節與轉速外環 Fuzzy-PI調節及轉速電流測量等環節的微機控制雙閉環調速系統[2]。圖1為魚雷推進電機直流斬波調速系統結構框圖。魚雷電池組作為斬波器直流電源,其電功率通過斬波器和電機轉換為魚雷運動的機械功率,由IGBT構成的橋式斬波電路將蓄電池的直流電斬波成電壓連續可調的直流電,供給魚雷推進電機使用。根據魚雷轉速變化的要求,實時調整斬波器的占空比,改變魚雷電機的輸入電壓,進而改變魚雷電機的轉速,實現魚雷的變速航行,提高魚雷的戰術性能。
2 調速系統控制方案
直流電動機的轉速正比于電樞端電壓U,故控制U就可以控制轉速n。圖2是H型雙極性可逆PWM驅動系統[3]。四個開關管分成兩組,VT1和VT4為一組,VT2和VT3為一組。一組的開關管同步導通或關斷,兩組的開關管的導通與關斷正好相反。
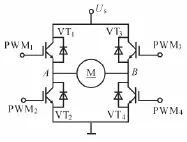
圖2 H型雙極性可逆PWM驅動系統
在每個PWM周期里,當VT1和VT4導通時,VT2和VT3截止,電樞繞組承受從A到B的正向電壓,反之電樞繞組承受從A到B的反向電壓。由于在一個PWM周期里電樞電壓經歷了正反兩次變化,因此其平均電壓

由(1)可見,雙極性可逆PWM驅動時,電樞繞組所受的平均電壓取決于占空比D大小。當D=1時,Ua=Us,電動機正轉且轉速最大;當D=1/2時,Ua=0,電動機不轉,雖然電動機不轉,但電樞繞組中仍有交變電流流動,使電動機產生高頻振蕩,這種振蕩有利于克服電動機負載的靜摩擦,提高動態性能;當D=0時,Ua=?Us,電動機反轉且轉速最大。
3 控制系統硬件設計
設計中選用主控芯片TMS320LF2407A是專門為電機的數字化控制而設計,特別適合于橋式直流電機的高性能控制[4]。圖3為控制系統硬件設計框圖。通過 DSP的 PWM輸出引腳PWM1-PWM4輸出的控制信號進行控制。采用增量式光電編碼器與電機相連,電動機旋轉時編碼器產生脈沖,由光電編碼盤接口(QEP)進入DSP通過對脈沖進行計數,獲得速度反饋信號。電流檢測回路采用霍爾電流傳感器檢測電流變化,通過ADCIN00引腳輸入給DSP,經A/D轉換產生電流反饋信號。獲取給定速度后,DSP計算出PWM 占空比,輸出 PWM 信號經光耦合驅動IGBT橋[6],電動機將根據要求的速度轉動。
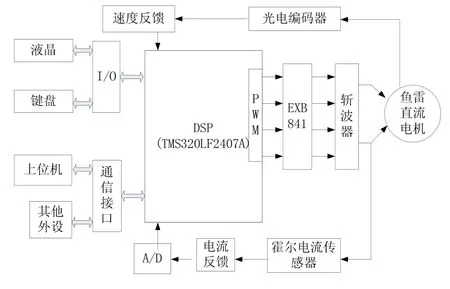
圖3 PWM雙閉環直流調速系統硬件框圖
3 軟件設計
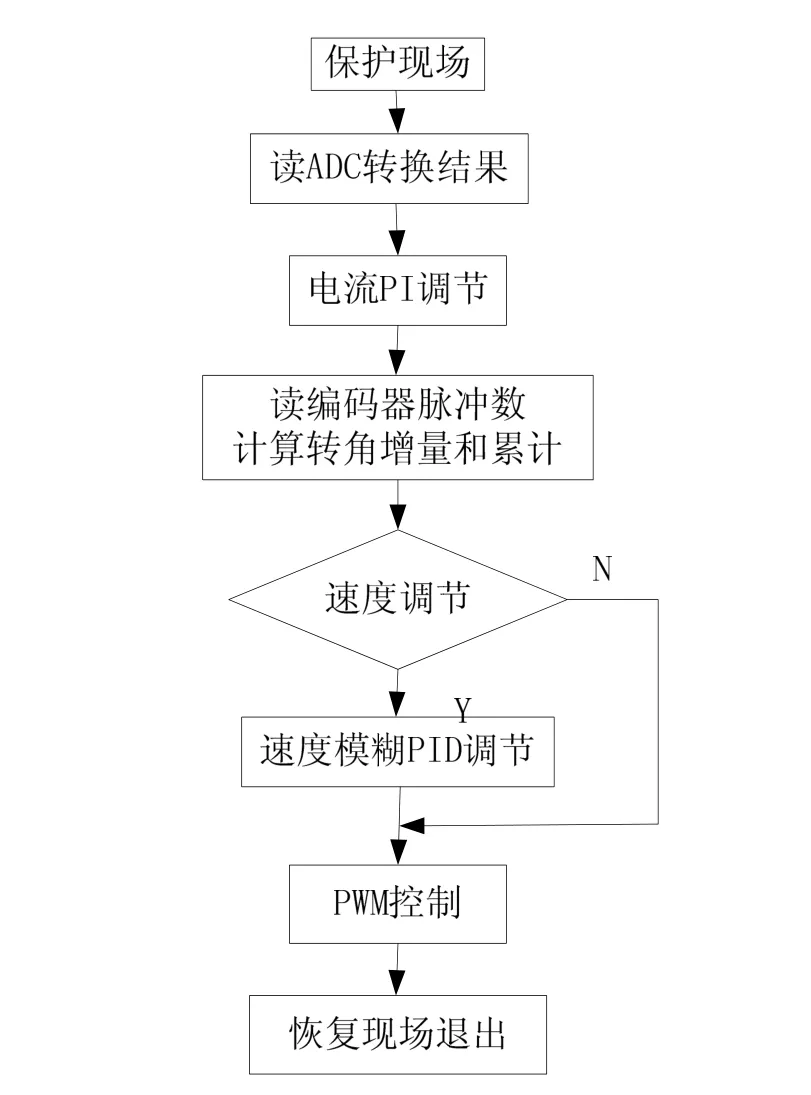
圖4 ADC中斷處理子程序框圖
采用 DSP實現直流電機調速控制的軟件由初始化程序、主程序和中斷子程序等組成。初始化程序主要有系統時鐘初始化、SCI模塊初始化、PWM 初始化、電流電壓采樣初始化、速度采樣初始化、系統變量初始化等。采用定時器1周期中斷標志來啟動A/D轉換,轉速結束后申請ADC中斷,圖 4是 ADC 中斷處理子程序框圖。全部控制功能都通過中斷子程序來完成。在每個PWM周期(50 μs)都進行一次電流采樣和電流PI調節,因此電流采樣周期和PWM周期相同,以實現實時控制。由于速度時間常數較大,在本程序中設計每90個PWM周期(4.5 ms)對速度進行一次調節[8]。速度外環采用模糊自整定PID調節器,其模糊自整定PID參數程序是在定時器T1中斷服務程序中完成,圖5是PID參數自整定程序框圖。
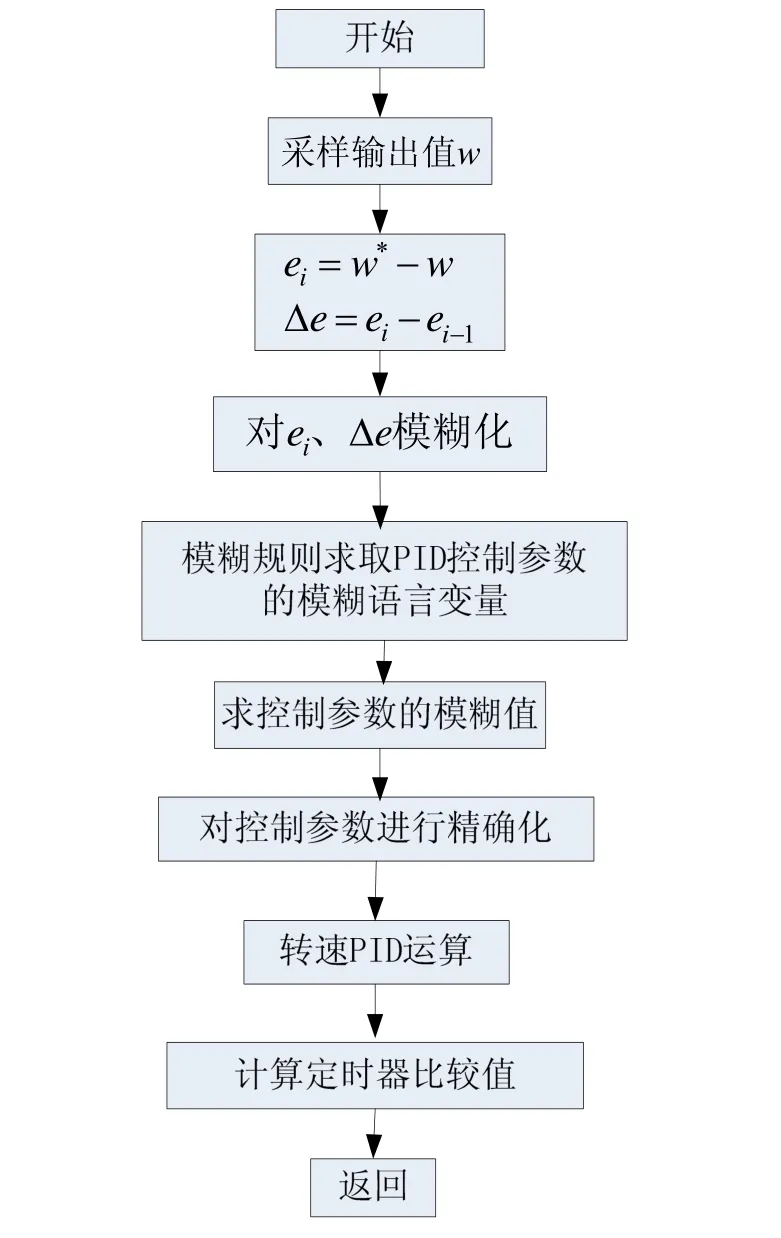
圖5 PID參數自整定程序流程
4 實驗結果
為檢驗魚雷直流斬波調速系統設計能夠實現無極變速,具有良好的動態和靜態性能,本系統的實驗是在一臺30 kW直流電機上進行的,實驗所用負載為一臺電渦流測功機。系統上位機采用可靠性較高的工控機,與主控DSP通訊部分采用的是 CAN 通訊模式。系統使用LabWindows/CVI6.0軟件開發了上位機的控制軟件。實驗結果如下:
圖6為電機從0加速到500 rpm時速度響應曲線,從圖中可以看到過渡時間僅為0.2 s。
圖7為電機從0加速到1000 rpm時速度響應曲線,從圖中可以看到過渡時間僅為0.3 s。
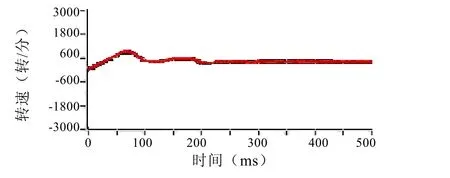
圖6 電機從0加速到500 rpm時速度響應曲線
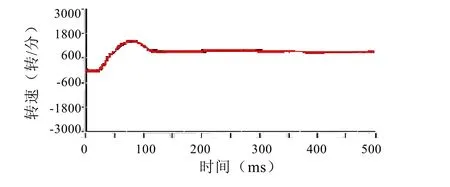
圖7 電機從0加速到1000 rpm時速度響應曲線
圖8為電機從0加速到2000 rpm時速度響應曲線,從圖中可以看到過渡時間僅為0.45 s。
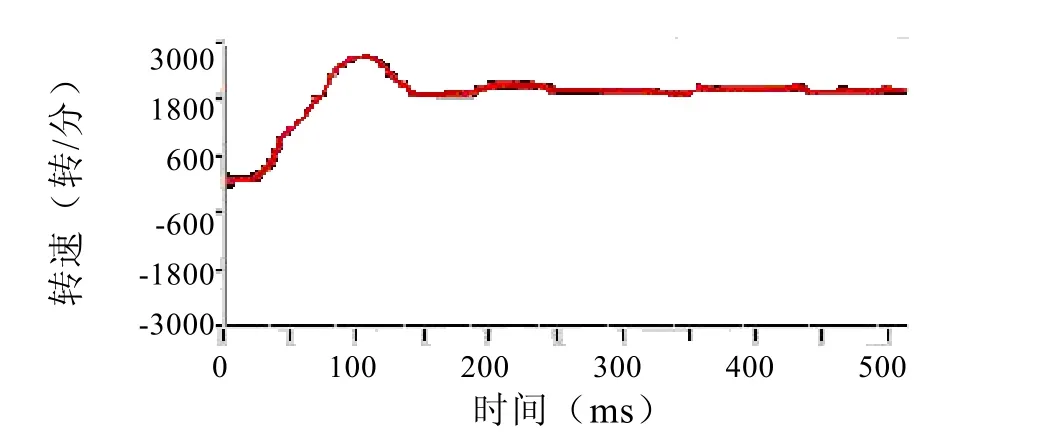
圖8 電機從0加速到2000 rpm時速度響應曲線
圖9為電機從1000 rpm減速到0時速度響應曲線,從圖中可以看到過渡時間僅為0.26 s。
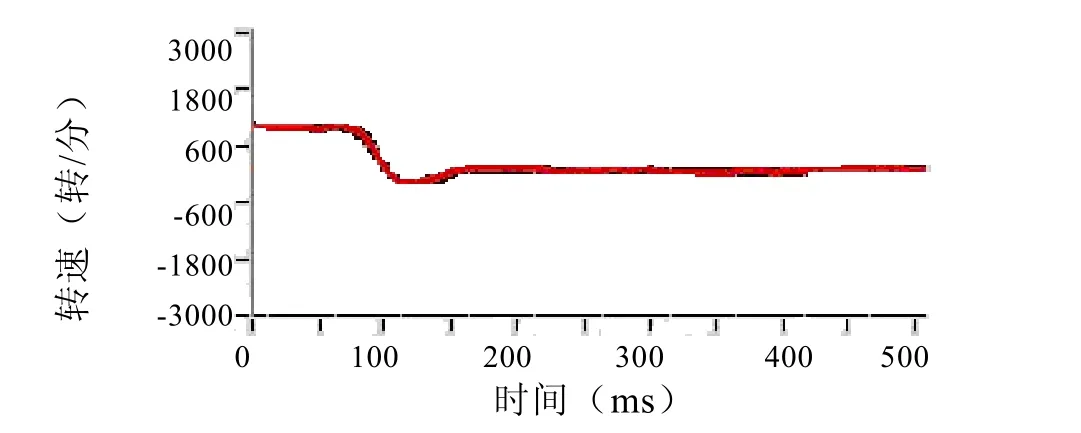
圖9 電機從1000 rpm減速到0時速度響應曲線
試驗結果表明實驗系統響應速度快、變速沖擊小、運行穩定,具有良好的動靜態性能。
5 結束語
針對目前我國電動魚雷主要采用電池組的串并聯實現魚雷二種速度的航行,其主要缺陷是變速過程沖擊大,調速范圍窄,難以滿足魚雷戰術要求的特點,本文進行了魚雷直流斬波調速系統的研究。該系統以TMS320LF2407A為控制核心,主電路采用H橋式直流斬波驅動和轉速、電流雙閉環調速。電流環作為內環使用PI調節轉速環作為外環使用Fuzzy-PI調節。經實驗室模擬負載試驗,結果表明該系統具有損耗和發熱量小,節約能源,噪音低,響應速度快,變速時沖擊小,運行穩定等優點。
[1]謝順依, 劉小虎. 魚雷推進電機斬波調速裝置研制[J]. 魚雷技術, 2005.9.
[2]盧文生, 宋虎. 基于 DSP的直流斬波調速模糊控制器[J]. 黑龍江科技學院學報, 2008.1.
[3]王曉明, 王玲. 電動機的 DSP控制-TI公司 DSP應用[M]. 北京: 北京航空航天大學出版社, 2004.7.
[4]林立, 唐旭等. 基于 DSP的 PWM雙閉環直流調速系統[J]. 微電機,2007.4.
[5]Astrom,K.J. Hagglund. The future of PID control[J].Control Engineering Practice, 2001, 9(11):1163-1175.
[6]王兆安, 黃俊. 電力電子技術[M]. 北京: 機械工業出版社, 2009.6.
[7]Leonhard, W. Control of electrical drives 3rd ed.Springer Verlag, 2001.
[8]江思敏. TMS320LF240X DSP硬件開發教程[M]. 北京: 機械工業出版社,2003.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32