用龍格-庫塔法優化一種模糊控制器
2011-06-26 06:11:12王江榮
電氣自動化 2011年5期
關鍵詞:優化
王江榮
(蘭州石化職業技術學院 信控系,甘肅 蘭州 730060)
0 引言
帶有可自調整因子的模糊控制器輸出的一般形式為U=-{α(t)E(t)+(1-α(t))EC(t)}(0<α<1),其中 E(t)和 EC(t)是模糊論域上量化后t時刻的誤差和誤差變化。α(t)是時刻t的可調整因子(可在線實時調整)。U=U(t)是模糊論域上的輸出,其值取決于對誤差和誤差變化的加權。對可調整因子α(t+1)=α(t)+Δα的在線修改往往根據人們的經驗或實驗調試確定,這樣的修改會有一定的主觀性和盲目性。本文利用四階龍格一庫塔公式逼近被控對象,再結合梯度下降法實現了可調整因子中的Δα(t)中的在線修改和在線優化,仿真曲線表明,在響應時間相同的情況下,具有優化后的調整因子的模糊控制器在穩定時間、超調及魯棒性等幾方面的性能均優于未優化的模糊控制器,顯著地改善模糊控制系統的控制精度和穩態性能。
1 龍格-庫塔
龍格-庫塔法是求解常微分方程初值問題的有效數值方法。這種方法的特點是區間[xk,xk+1]上取N個點,以這N個點的斜率值f(xk,yk)的線性組合為加權平均斜率,構造近似公式
其中 k1=f(xk,yk)

確定這些常數的原則和方法是:將精確解y(xk+1)在xk作Taylor展開,ki在(xk,y(xk))點作二元Taylor展開,將展開式按h的冪次整理后,令h0,h1,h2,…等項的系數為零,使Tk+1首項中 h的冪次盡量高。
在近似公式中取N=4,可得到四階龍格-庫塔法公式yk+1其中 k1=f(xk,yk)
四階龍格-庫塔法的優點是它的精確度高且是一步法,即已知yk就可以算出yk+1,另外容易用程序實現。
2 可調整因子α(t)的自動優化過程
設t時刻的可調因子值為α(t),t時刻算出的α(t)的增量為Δα(t),t時刻后算出的修改因子為 α(t+1)=α(t)+Δα,Δα 可由t時刻采樣所得的誤差e(t)求得。對α(t)的實時修改和優化具體推理過程如下:
設t時刻的誤差e(t)和誤差變化ec(t)量化后得到模糊論域上的誤差為E(t)和誤差變化EC(t),則t時刻模糊控制器在模糊論域上的輸出為

該輸出乘以輸出比例因子Ku就得到t時刻的控制器的實際輸出 u(t),即
設被控對象的狀態方程(可用MATLAB軟件將被控對象的傳遞函數H(s)轉化為狀態方程)
其中,A,B,C,D 是系數矩陣。u為式(1)。
用龍格-庫塔法逼近被控對象如下
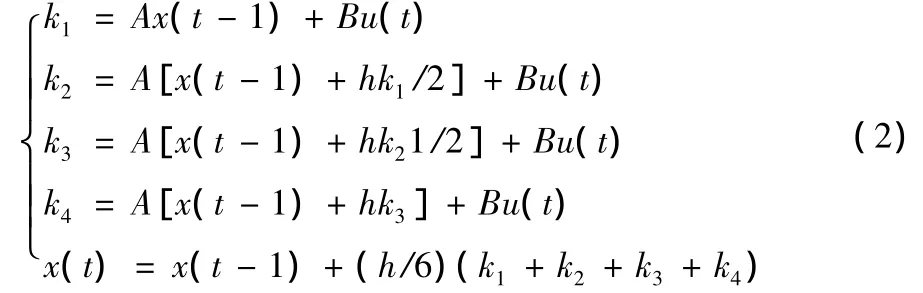
則t+1時刻系統的輸出為

t+1時刻的誤差

這里的r(t+1)是系統輸入。
Δα(t)的計算
這里的λ和μ是比例系數。
按負梯度方向求t時刻可調整因子α(t)的增量Δα(t),即
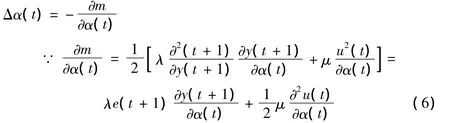

由(2)可得
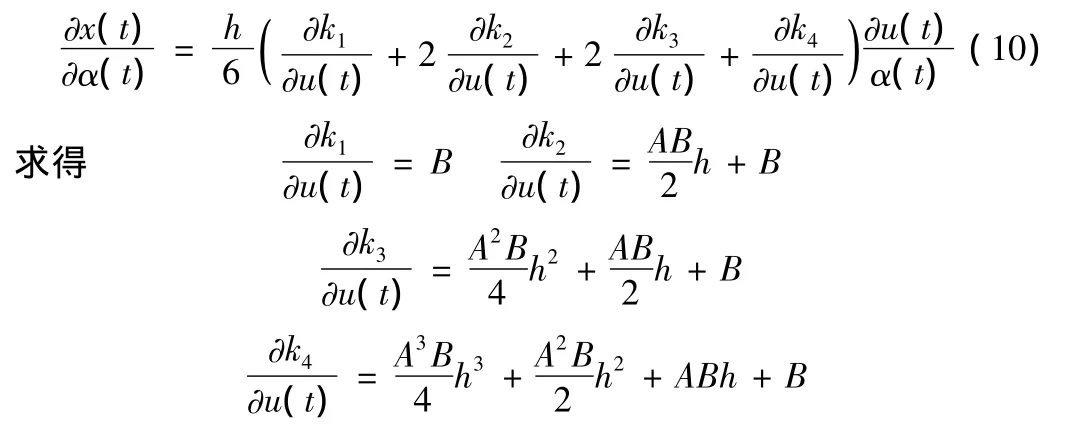
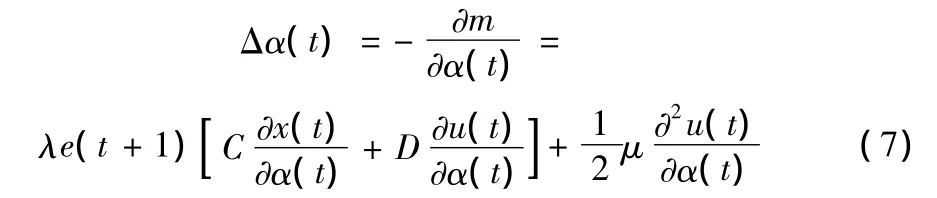
將上四式代入(9)得

將(8)、(9)及(11)代入(7)得
當系統確定時,即A,B,C,D及h確定時

由(12)知只需調整參數β和γ就能計算出Δα(t)(并不依賴狀態方程中的系數矩陣),進而實現對模糊控制器的優化。
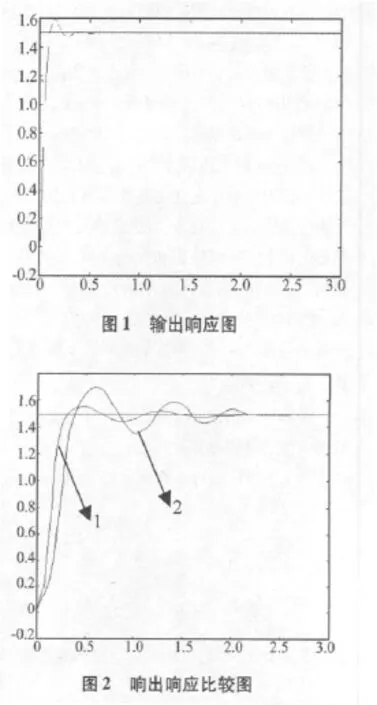
3 仿真結果
利用MATLAB進行仿真實驗
(2)假設系統的模型可以用二階加純滯后表示,即傳遞函數為采樣時間間隔為 ΔT=0.01 s,輸入為階躍函數r(t+1)=1.5,α 的初始值取 0.5,β=0.065,γ =0.015時,系統的輸出響應為如圖2中的曲線1.圖2中的曲線2是沒有加修改的 Δα(t)的情形。可以看到用龍格-庫塔法進行修改 Δα(t),模糊控制器的輸出曲線上升時間短(到達穩態),且具有很好的穩態性能(振蕩幅度小),說明本文方法起到了優化效果。
4 結束語
本文利用龍格-庫塔法改進了自尋優模糊控制器的可調因子α(t),實現了對α(t)的在線實時優化。從仿真曲線表明,在響應時間相同的情況下,具有優化后的調整因子的模糊控制器在穩定時間、超調及魯棒性等幾方面的性能均優于未優化的模糊控制器。它最大限度地識別和利用控制系統所提供的信息,不斷的修正控制規則,使控制器本身的控制規律適應系統的需要,從而顯著地改善模糊控制系統的控制精度和穩態性能。
[1]李國勇.模糊控制神經控制和智能控制論及應用[M].北京:電子工業出版社,2010(1):164-224.
[2]雷德明.一種新型自學習模糊控制器[J].信息與控制,2000,29(6):559-562.
[3]李榮華,等.微分方程數值解法[M].北京:高等教育出版社,2002(8):59-60.
[4]侯忠生.非參數模型及其自適應控制理論[M].北京:科學出版社,1999:30-80.
[5]劉航,徐社.MATLAB在模糊控制系統設計與仿真中的應用[J].計算機應用研究,2001(1):27-28.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45