一種改進的圖像快速高精度角點檢測算法
2011-06-25 09:39:24何豐,胡俊,馬浩,郝寬
電視技術 2011年15期
關鍵詞:檢測
何 豐,胡 俊,馬 浩,郝 寬
(重慶郵電大學 通信與信息工程學院,重慶 400065)
0 引言
角點是計算機視覺研究和圖像處理中常用的特征點,也是圖像中的一種重要的局部特征點,決定著圖像的大致形狀,因此在圖像匹配及配準、目標識別、光流統計等鄰域,角點檢測有著獨特的應用前景[1-8]。
現今較為流行的角點檢測有兩類:基于邊緣特征提取的角點檢測算法和基于灰度變化的角點檢測算法。基于邊緣特征提取的角點檢測算法如文獻[2]所示,但是這類方法存在的主要缺點是角點對邊緣提取算法的依賴性很大,如果邊緣線發生了中斷,對角點提取的結果將造成很大影響。基于圖像灰度的角點檢測方法主要通過計算曲率及梯度來達到檢測圖像角點的目的,但是這類方法也存在不足:1)未考慮多尺度的因素,如果選用較小窗口高斯卷積后提取角點,那么就會因為噪聲的影響出現較多的角點,如果選用較大窗口高斯卷積,又會因為卷積圓角效應使角點的位置出現較大的偏移[3]。2)一般使用梯度與曲率的某種運算的結果局部極值作為角點,但是局部極值點與角點真實位置存在較大偏移。本文提出一種改進的圖像快速高精度角點檢測算法,利用改進的Harris角點檢測算法檢測速度快的優點,先檢測出較多的候選角點,再利用大模板檢測的準確性高,誤檢率低的優勢,采用9×9模板的USAN區域所對應的弧的像元灰度與角點的相似性來完成最終角點的提取,并且采用了自適應的閾值設定,因此在不同對比度圖像中都能實現自適應的閾值設定。仿真結果表明,這種方法在角點檢測中效果比較突出。
1 改進的Harris方法和SUSAN檢測原則
1.1 改進的Harris角點提取方法
Harris[3]算法是Chris Harris和Stepthen提出的一種基于自相關函數的圖像灰度梯度的檢測算法,該算法的主要思想是通過設定一個窗口模板在圖像中移動,計算模板的亮度變化情況,從而判斷出角點的位置。
在檢測過程中,Harris算法采用x方向的梯度算子(-1,0,1),y方向的梯度算子采用其x方向轉置,為了提高定位的準確性,窗口模板的亮度變化的靈敏性,本文采用x方向的梯度算子(-2,-1,0,1,2),相應的y方向為其轉置。改進的Harris算法的步驟如下:
1)計算圖像在x和y方向的梯度算子Ix,Iy為


2)為了提高抗噪聲性能,在圖像中加入了二維高斯窗口模板,利用高斯平滑降低噪聲的影響,G=exp[-(x2+y2)/2σ2]是高斯窗口模板,當以像元點(x,y)為中心的窗口模板在x方向移動為u,y方向移動為v,那么亮度變化度量的表達式為

式中

3)對圖像進行高斯平滑處理,自相關矩陣M為

式中:λ1和λ2定義為其自相關函數的兩個特征值,角點響應的條件為,當λ1和λ2都較大時,窗口模板在圖像中沿任何方向移動都會引起其內部的亮度劇烈變化,表明特征點為角點。
4)Harris角點響應函數為

式中:det M代表M的行列式,tr M代表M的跡。
由于尺度因子k的隨機性,在對比度變化劇烈的圖像中,角點提取的效果將會受到很大的影響,為了提高檢測性能,角點響應函數重定義為

式中:δ為極小值,一般取δ=10-8,當檢測像元點的角點響應函數大于給定閾值,并是局部極大值時,那么該像元點就為角點。
1.2 改進的SUSAN角點提取方法
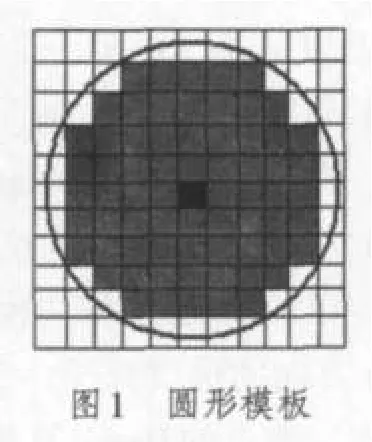
由USAN區域的概念可知,在圖像中任取一點,把以該點為圓心的圓形模板存在一個區域的亮度值與該圓心亮度值相同或相似的區域定義為USAN[5]。正是基于USAN的思想,本文提出了可以利用USAN所對應弧判定角點的方法。算法的思想是:把灰度圖像中的角點重新定義為,如果USAN所對應弧長是最短,同一核心USAN所對應的圓形模板的圓弧是連續性的,那么把該點定義為角點。為了更好地提高檢測性能,選用9×9的大模板進行角點的檢測,圓形模板為9×9的模板,如圖1所示。
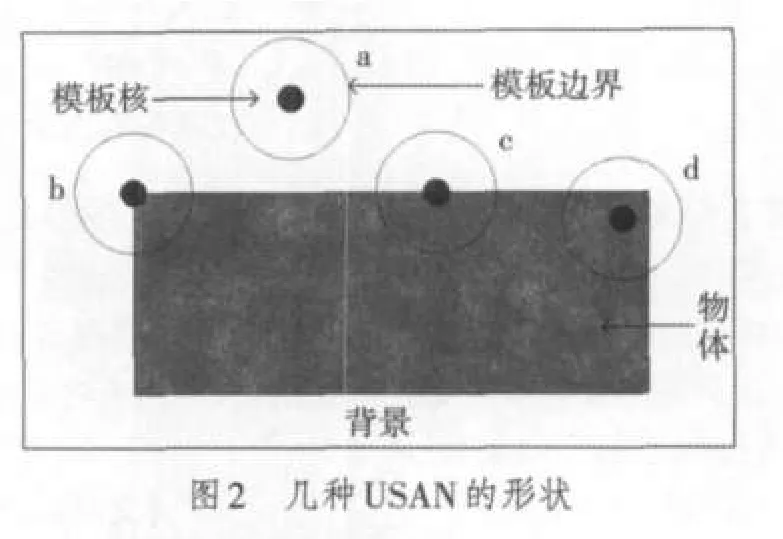
由圖2可知,在d模板中,USAN對應的圓形模板弧長大于1/2L。c模板圓形模板的核心處在邊緣上,USAN對應的圓形模板弧長為1/2L。b模板圓形模板的核心處在角點處,USAN對應的圓形模板弧長為最小1/4L。圖2中模板a是最大USAN區域對應的圓形模板的弧長最大為L。
改進的SUSAN算法步驟為:
1)設定圓形模板核心像素點亮度值與模板圓周像素點亮度值比較函數是

式中:I(x0)是圓形模板圓心像素點的亮度值,而I(x)則是模板圓周某點處像素的亮度值,y為比較函數的閾值。考慮到實際情況,把比較函數重定義為[9]

式中:t為閾值。
2)灰度圖像中任意一點USAN對應的圓形模板的弧長為

除去N(x0)大于1/2L的點,把其余點作為候選點作下一步提純。
3)證明同一核心USAN所對應的圓形模板的圓弧是連續的,這是為了更好地剔除偽角點。取9×9圓形模板的圓周上任意一點為起始點,按逆時針方向判定圓形模板圓心像素點亮度值和模板圓周上像素點亮度值的判定函數g(xj,i)的跳變次數,其中xj∈R(i),R(i)是以i為圓心的圓形模板圓周上的像元集合,這時就可以根據判定函數的跳變情況來確定弧的連續性,當判定函數g(xj,i)沒有發生跳變時,即0次跳變情況,就認定該點為噪聲點和干擾點,先設定圓形模板圓周上任意兩點,假設為M和N。當判定函數g(xj,i)發生1次跳變情況時,這說明圓形模板圓周上M和N兩點是重合的。當發生了2次跳變情況時,如果判定函數g(xj,i)=0,g(xj+1,i)=1,那么就認為像素點xj和xj+1是從非USAN對應的圓形模板的圓弧向USAN對應的圓形模板圓弧轉變的邊界點,xj+1稱為M,如果判定函數g(xj,i)=1,而g(xj+1,i)=0,那么就認為像素點xj和xj+1是從USAN對應圓形模板圓弧向非USAN對應圓形模板圓弧轉變的邊界點,xj稱為N。如果判定函數g(xj,i)跳變次數大于2次,那么表明同一核心USAN所對應的圓形模板的圓弧是非連續性的,該點對應的就是非角點。因此可以通過邊界點M沿圓形模板圓周的逆時針方向到圓周上的另一邊界點N統計判定函數g(xj,i)的值是否全是1,若全為1,那么同一核心USAN所對應的圓形模板的圓弧是連續性的。
4)角點響應函數的響應為

式中:k為圓形模板的弧長閾值。
5)候選角點進行了非極大值抑制,將USAN對應的圓形模板的圓弧為局部最小,也就是max R(x0)的像素點為最終角點的情況。
2 改進后的算法
在試驗中發現,僅用改進的Harris算法雖然檢測比較快,但是檢測出來的效果不是很理想,對噪聲的影響較大。而改進的SUSAN算法雖然檢測的效果較好,但是檢測比較慢,效率不高。綜合兩者的優點,先利用改進的Harris算法對全圖粗檢測一下,提取出較可能多的角點,然后利用改進的SUSAN算法檢測驗證其角點的真偽,那么檢測的速度大為提高。
算法流程如圖3所示,具體步驟為:
1)初始化,設定模板大小、鄰域模板大小和參數。
2)計算每點的角點反應函數(式(6)),當檢測像元點的角點響應函數大于給定閾值,并是局部極大值時,作為角點候選點。
3)在L個候選角點中,證明同一核心USAN所對應的圓形模板的圓弧是連續的,這是為了更好地剔除偽角點。
4)把候選點進行非極大值抑制,將USAN區域對應的圓弧為局部最小的像元點確定角點。
5)返回步驟3),直到計算完L個候選角點,確立最后角點。
3 試驗結果與分析
為了檢驗改進算法的好壞,分別對盒子圖像與房子圖像進行了一系列仿真測試,仿真環境為Matlab7.0。圖4a為改進的SUSAN算法效果圖,其中灰度差值門限系數R=6,δ=10-8。圖4b為改進的Harris算法的效果圖。圖4c為本文所提出的算法,有較好的角點檢測效果,在圖像的角點定位的準確性和誤檢上,都比傳統算法有較好的提高。圖5a為改進的SU?SAN算法效果圖,其中灰度差值門限系數R=8,δ=10-8。圖5b為改進的Harris算法的效果圖。圖5c為本文所提出的算法,在真實圖像中也有較好的檢測效果。圖6a,6b,6c分別為在圖像中加入了高斯噪聲(σ=0.01)后,改進的SUSAN算法、改進的Harris算法和本文算法提取出的角點,由圖6b可知,改進的Harris算法在有噪聲情況下,出現的偽角點較多,對噪聲比較敏感。改進的SUSAN算法和本文提出的算法在抗噪聲能力上都較好,但本文提出的算法在抗噪聲性能上更勝一籌,然而,值得一提的是,改進的SUSAN算法很大一部分針對抗噪聲性能設計,而本文提出的算法則是綜合了其優點。
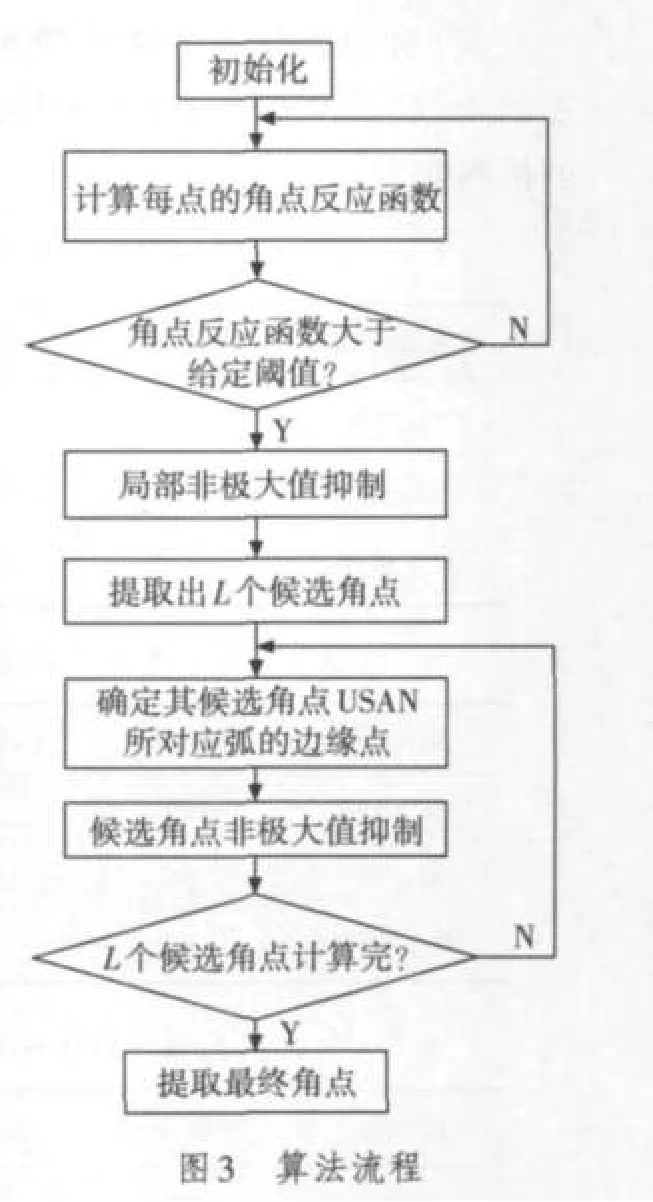
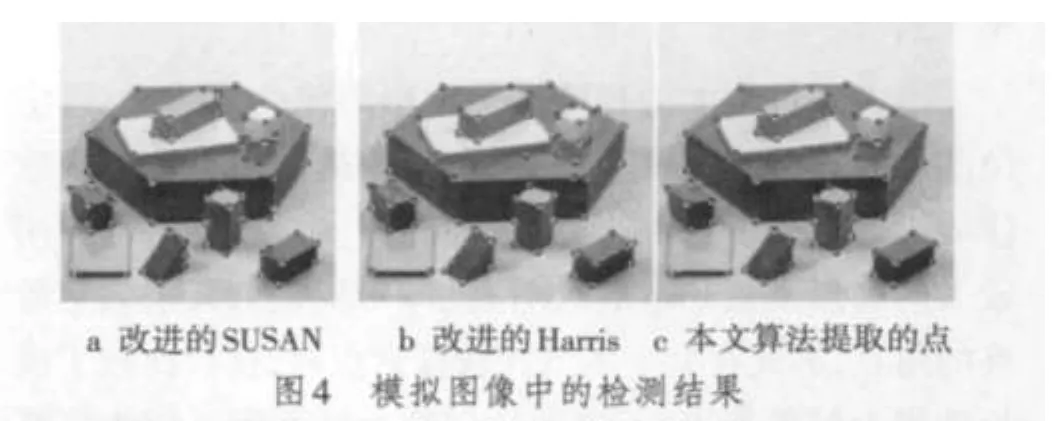
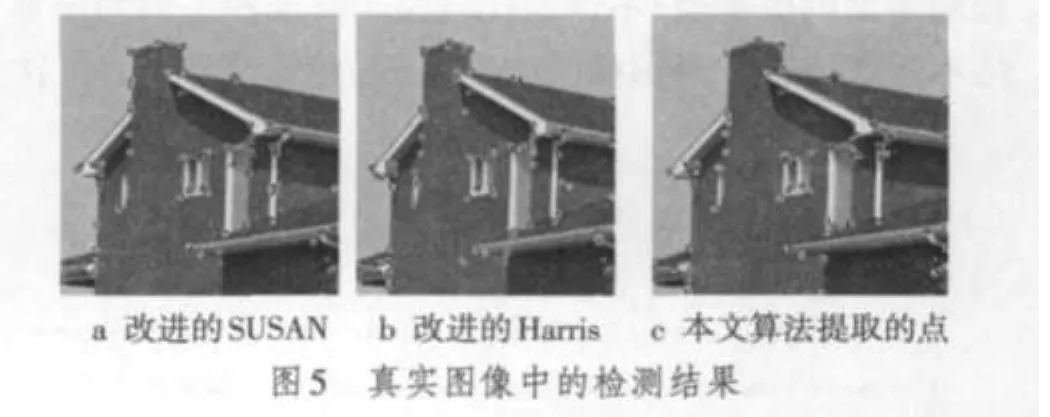
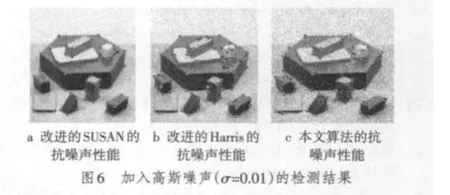
表1和表2分別對盒子圖像和房子圖像統計出了角點的個數,表3統計數據充分體現了本文算法具有較好的抗噪能力。
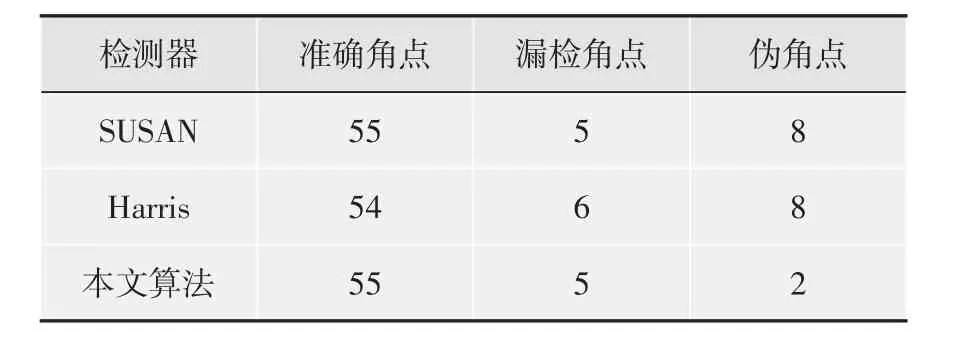
表1 模擬圖像中的角點統計結果
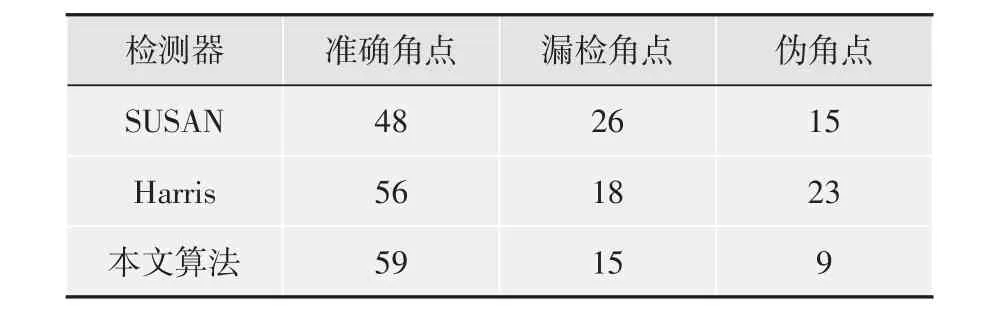
表2 真實圖像中的角點統計結果
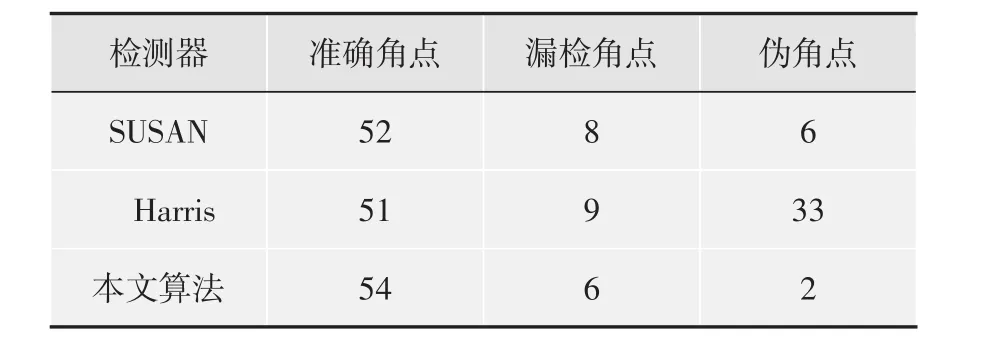
表3 加入高斯噪聲(σ=0.01)的試驗結果對比
4 小結
本文通過更大的梯度算子求得圖像的導數,使得定位的準確性得到了提高,然后利用改進的角點響應函數使得檢測的性能進一步提高,檢測出候選角點后再利用較大的圓形模板USAN所對應的圓形模板圓弧來確定最終的角點,因此在判定函數比較像素點時,僅僅比較了模板圓周上的像素點,不需要比較整個圓面積。因為該算法不需要依賴于對圖像的前期處理,并且設計了多層次的提純角點,具有較好的積分特性,所以在不加噪聲和加噪聲的圖像中都有較好的角點提取能力。下一步的研究將是提高角點在圖像模糊邊界的提取。
[1]PEI S C,DING J J.New corner detection algorithm by tangent and vertical axes and case table[C]//Proc.IEEE International Conference on Image Processing.[S.l.]:IEEE Press,2005:365-368.
[2]王凱,于海勛,王廣平.一種改進的小波多尺度相乘目標邊緣提取方法[J].計算機仿真,2009,26(10):244-247.
[3]張小洪,李博,楊丹.一種新的Harris多尺度角點檢測[J].電子與信息學報,2007,29(7):1735-1738.
[4]馮宇平,戴明,張威,等.一種用于圖像序列拼接的角點檢測算法[J].計算機科學,2009,36(12):270-271.
[5]張映權,王瓊華,李大海,等.改進的SUSAN角點檢測算法[J].現代電子技術,2009,32(20):42-44.
[6]葉伯洪,徐杜,蔣永平,等.一種改進的SUSAN角點提取方法[J].光學與光電技術,2010,8(1):47-51.
[7]RAFAJLOWICZ E.SUSAN edge detector reinterpreted,simplified and modified[C]//Proc.International Workshop on Multidimensional Systems.[S.l.]:IEEE Press,2007:69-74.
[8]陳書貞,張俊軍,練秋生.基于局部特性的指紋細節點提取算法[J].電視技術,2007,31(11):90-91.
[9]WENG Muyun,HE Mingyi.Image feature detection and matching based on SUSAN method[C]//Proc.International Conference on Innovative Computing,Information and Control.Beijing:[s.n.],2006:322-325.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48