基于CCD攝像頭的換向器云母槽檢測與定位系統設計
2011-06-19 03:00:36管功湖胡永良
微特電機 2011年3期
管功湖,胡永良
(臺州學院,浙江臨海317000)
0 引 言
直流電動機因其調速性能好、起動轉矩大等優點,在各行業中得到了廣泛應用。直流電動機定子提供磁場,直流電源向轉子繞組提供電流,換向器使轉子電流與磁場產生的轉矩保持方向不變,使電動機保持轉動狀態。換向器是直流電動機的重要組成部件,主要由換向片和云母片構成。換向片采用銀銅、鎘銅等合金材料,云母片起到絕緣作用。換向器把銅材料與云母在一定溫度下壓制而成,并通過固化處理。
換向器在實際應用時云母槽要進行下刻,自動刻槽系統是直流電動機制造過程中必需的設備,其關鍵問題是對云母槽的檢測與定位。檢測方法主要有接觸式[1]和非接觸式兩種,非接觸式因其適應性強而得到廣泛應用,如采用激光傳感器、光纖傳感器、CCD 或 CMOS 傳感器[2-3]。隨著 CCD 或 CMOS傳感器技術的發展,由它們構成的自動刻槽系統具有精度高、效率高、適應性強的優點。本文主要針對汽車起動機轉子換向器云母刻槽過程,利用CCD攝像頭拍攝換向器視頻圖像,然后對視頻圖像進行處理,識別出換向器云母槽的位置。在單片機的控制下,由步進電動機帶動轉子,使得云母槽和銑刀對準,然后完成對換向器云母刻槽工作。設計的換向器云母槽檢測與定位系統也可應用于電動工具等其它轉子換向器云母刻槽過程。
1 云母槽檢測與定位系統構成
在汽車起動機生產過程中,起動機的換向器表面加工處理過程是:換向器半精車、云母槽下刻、換向器精車。云母槽下刻過程位于半精車和精車之間,一旦在云母槽下刻過程中換向器表面形成的微小劃痕可在精車時去除。換向器云母槽檢測與定位系統構成如圖1所示。
主要由單片機、光源、CCD攝像頭、監視器、步進電動機、銑刀機構等部件構成。換向器在光源的照射下,由CCD攝像頭實時拍下它的圖像,以視頻方式輸出,一路送給監視器,另一路經圖像處理單元處理后,獲取換向器的銅片和云母槽的識別信息,再送給單片機,經過處理后確定云母槽的運動位置信息,然后驅動步進電動機帶動換向器轉動,當換向器的云母槽位置和銑刀位置對準時,單片機發出銑槽指令,銑刀執行機構完成一次銑槽過程,當換向器的云母槽全部銑完后,停機。
2 云母槽視頻檢測與識別電路設計
汽車起動機換向器的云母槽一般有28槽或29槽,云母槽的寬度和深度在2 mm左右。當燈光照射在換向器上時,銅片和云母片的反光性能是不同的,前者反光性能好,因此用黑白CCD攝像頭拍下的換向器視頻圖像則是亮暗分明,通過對視頻圖像處理后,就能獲取云母槽的位置信息。
2.1 CCD 攝像頭
CCD攝像頭采用CCD圖像傳感器作為感光器件。CCD與CMOS圖像傳感器是當前普遍采用的兩種圖像傳感器,兩者都是利用感光二極管進行光電轉換,將圖像轉換為數字數據,而其主要差異是數字數據傳送的方式不同。CCD圖像傳感器在靈敏度、分辨率、噪聲控制等方面都優于CMOS圖像傳感器,而CMOS圖像傳感器則具有低成本、低功耗、以及高整合度的特點。在本系統中采用VS-808H黑白CCD攝像頭,它的成像元件是1/3 SONY CCD,有效像素為752×582,水平解析度為600線,標準的1.0 V、75Ω復合視頻信號輸出。
2.2 視頻同步分離電路
視頻信號中除了包含圖像信號之外,還包括了行同步信號、行消隱信號、場同步信號、場消隱信號以及槽脈沖信號、前均衡脈沖、后均衡脈沖等。要對換向器視頻圖像進行處理,就必須從中分離出行同步、場同步、奇偶場等識別信號。LM1881可以從0.5~2 V的標準負極性NTSC制、PAL制、SECAM制視頻信號中提取復合同步、場同步、奇偶場等識別信號,以便確定采集點在哪一場、哪一行[4]。LM1881芯片引腳與時序如圖2所示。
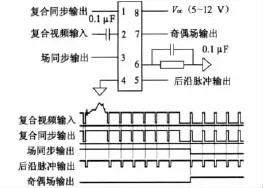
圖2 LM1881芯片引腳與時序
CCD攝像頭的復合視頻從LM1881的2腳輸入后,經1、3、7引腳分別輸出行同步場同步、奇偶場等識別信號,然后送給單片機作為處理換向器視頻圖像的信號。
2.3 視頻圖像識別電路
因起動機的轉子是豎向放置,通過CCD攝像頭獲得的換向器黑白視頻圖像是黑白條垂直的圖像。白色顯示的是銅片圖像,而黑色顯示的則是云母槽圖像,為了能更好地識別云母槽的圖像信息,把CCD攝像頭的安裝位置旋轉90°后,得到水平的視頻圖像。
換向器視頻圖像由黑白兩色組成,通過二值化處理來識別換向器槽的位置信息,二值化處理主要有軟件二值化和硬件二值化,通常可用固定閾值法和邊沿跳變法對圖像進行黑白分割。對換向器黑白視頻圖像的采集方法可以采用A/D轉換器和硬件比較器。如采用A/D轉換器來采集視頻信息,采樣精度高,能夠保存圖像的灰度信息,可以極大程度地防止圖像信息的丟失。但是A/D轉換速度要求足夠快,外圍電路比較復雜,而且占用了較多的I/O口資源。為了降低單片機的計算負荷,對PAL信號進行硬件二值化,采用固定閾值法將灰度圖像轉換成黑白圖像,并得到了滿意的效果,固定參考電壓的二值電路如圖3所示。
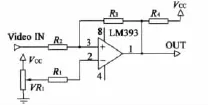
圖3 固定參考電壓的二值電路
采用LM393比較器構成的固定參考電壓的二值電路比較簡單,對參考閾值電壓調節也比較方便,只需調節一個電位器阻值即可,故具有一定的場境適應性。
3 云母槽定位系統設計
換向器云母槽定位系統是根據前述的利用CCD攝像機獲取的視頻圖像,一路經視頻同步分離電路,產生行和奇偶場同步信號,另一路經過硬件電路二值化,然后一起送給單片機處理,控制步進電動機轉動,使得云母槽和銑刀位置對準,然后實現刻槽過程。要求做到定位速度快,同時定位準確。設計時采用單片機控制的步進電動機自動定位系統[5-6],它的主要特點是動作速度快,能實現精確定位、無積累誤差。通過軟件產生步進電動機的控制脈沖序列,實現步進電動機的起停、加減速及正反轉的控制。不僅簡化了硬件線路,降低成本,并且提高了系統的可靠性。
3.1 步進電動機控制電路
在綜合考慮定位系統的定位精度及負載的情況下,步進電動機選型時采用三相反應式步進電動機75BF001,它的工作電壓為24 V,電流為3 A,步距角為1.5°/3°,保持轉矩為 0.392 N·m。采用三相六拍運行方式,同時采取10∶1的行星齒輪減速,以提升定位精度,每步為0.15°。步進電動機的控制采取開環控制及全電壓驅動方式,控制電路以單片機為核心,控制脈沖序列和環行脈沖分配等由相應的軟件實現。步進電動機的控制電路如圖4所示。
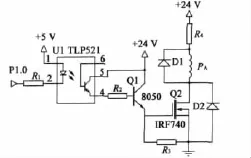
圖4 步進電動機的控制電路
圖中只給出步進電動機A相的控制電路,單片機的P1.0低電平有效,使光耦TLP521導通,繼而使Q1導通,然后驅動Q2導通,使步進電動機A相得電。其中R4是大功率限流電阻,D1和D2是快恢復二極管。B、C相控制電路類似,分別由單片機的P1.1、P1.2控制。由此可以得到步進電動機工作在三相六拍方式時正轉的控制字為01H、03H、02H、06H、04H、05H,反轉的控制字為 01H、05H、04H、06H、02H、03H。步進電動機的加減速是通過控制P1.0 、P1.1 和 P1.2 輸出的脈沖頻率來實現。
3.2 定位算法設計
換向器黑白視頻圖像是采用PAL制輸出,掃描方式為隔行掃描,每秒50場,場周期為20 ms,每場為312.5行,行周期為64μs。黑白電視信號由圖像信號、復合消隱脈沖、復合同步脈沖組成。場消隱期寬度為25個行周期,場同步脈沖寬度為2.5個行周期,行消隱期寬度為12μs,行同步脈沖寬度為4.7 μs。在視頻區域中每行信號持續時間約為64μs,行同步脈沖持續約4.7μs,所以每場圖像單個視頻信號行中有效視頻持續的時間為57.3μs。
在圖像處理中,模板匹配定位法是常用的確定物體位置的方法。在本系統中采用單片機作為控制中心,它的運算能力有限,同時對視頻圖像采用硬件二值化,所以不適合采用模板匹配定位法。銑刀與云母槽對準過程采用視頻定位與手工調試相結合的方法。云母槽的定位基準設定在每場視頻的中間區域145行至165行處。為了提高定位速度,開始時控制步進電動機以較快的速度轉動,到達目標區域時進行減速,以提高定位準確度。在換向器轉動時,當云母槽的起始邊緣到達每場視頻的145行處減速轉動,到達165行時停止。
云母槽視頻定位具體實現時單片機以視頻同步分離電路送來的奇偶場同步信號作為判斷信號,低電平是奇場同步,高電平是偶場同步。在奇偶場中分別對行同步信號進行計數,當計數達到145或146時,判斷視頻圖像的硬件二值化值,當其為低電平時,控制步進電動機減速,當計數達到165或166時,判斷視頻圖像的硬件二值化值,當其為低電平時,控制步進電動機停止。
為了使銑刀與云母槽對準,設立手工調試模式,調試分單槽調試和連續調試。在換向器刻槽前,先使用單槽調試,每按一次起動按扭走一槽,不斷調整攝像頭的微調旋扭,使銑刀與云母槽對準。然后使用連續調試,在此方式下,會自動尋找下一槽,結合攝像頭和燈光的調整,完成銑刀與云母槽對準的調試過程。
4 結 語
換向器云母槽的檢測與定位是換向器自動刻槽機的關鍵技術,設計的基于CCD攝像頭的云母槽視頻檢測與定位系統通過視頻同步分離,采用硬件二值化處理,簡化硬件電路,同時減輕單片機的運算負荷。該系統成功地應用在汽車起動機換向器自動刻槽機中。
在實際使用過程中,光源、云母粉末和銅屑對CCD攝像頭拍攝的視頻圖像產生影響,從而影響定位。所以需要注意光源的調整及云母粉末和銅屑的清理,尤其是CCD攝像鏡頭的清理。實踐證明系統運行穩定,定位速度快,準確度高。
[1]龐極洲,賈育秦,畢友明.基于PC的電機云母槽自動下刻機測控系統的設計[J].太原科技大學學報,2005,26(4):287-290.
[2]喻凌宇,朱衡君,景文軍.基于面陣CCD的云母自動下刻機檢測定位系統[J].儀器儀表學報,2000,21(6):618-620.
[3]王陽,邱成,張占軍,等.基于索引式絕對位置編碼線陣CCD的下刻機定位系統[J].儀器儀表標準化與計量,2006(5):7-9.
[4]葛亞明,劉濤,王宗義.視頻同步分離芯片LM1881及其應用[J].應用科技,2004,31(9):20-22.
[5]何忠韜,李永昶,劉毅.自動刻槽機的步進電機微機控制系統[J].中小型電機,2005,32(3):49-51.
[6]譚玉柱,侯曉軒.三相反應式步進電機接口電路設計及應用[J].中小型電機,2000,7(1):33-34.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
