分散控制系統(tǒng)中I/O模件通信實現(xiàn)方法分析
2011-06-13 00:35:28吳勝華王丹麟
綜合智慧能源 2011年11期
吳勝華,王丹麟
(國電南京自動化股份有限公司研究院,江蘇南京210003)
1 問題的提出
在分散控制系統(tǒng)(DCS)中往往涉及大量設(shè)備狀態(tài)的監(jiān)測與控制,這些設(shè)備狀態(tài)可能是模擬量信號輸入、模擬量信號輸出、開關(guān)量輸入、開關(guān)量輸出、脈沖量輸入等。在DCS中要設(shè)置多個過程控制站,用以分擔(dān)整個系統(tǒng)的現(xiàn)場I/O模件和控制功能。每個(或1對冗余)過程控制站需要在200ms內(nèi)完成所有的工作任務(wù),包括自身的各種運算、控制,與冗余控制站之間的數(shù)據(jù)同步,與數(shù)據(jù)采集和監(jiān)視控制系統(tǒng)(SCADA)/人機(jī)界面系統(tǒng)(HMI)之間的通信以及與現(xiàn)場800到1000點實時數(shù)據(jù)的交換。
由于I/O層通信網(wǎng)絡(luò)對于整個DCS的實時性、可靠性和擴(kuò)充性起著決定性作用,因此,各廠家在這方面進(jìn)行了精心設(shè)計。對于DCS的I/O層通信網(wǎng)絡(luò)來說,它必須滿足實時性的要求,即在確定的時間內(nèi)完成信息傳送。“確定的時間”是指無論在何種情況下信息傳送都能在該時間內(nèi)完成,而該時間是根據(jù)被控制過程的實時性要求確定的。對于實用的大中型分散式控制系統(tǒng)來說,要求每個(或1對冗余)過程控制站完成1個運算周期及數(shù)據(jù)交換的時間在200ms以內(nèi)。因此,衡量系統(tǒng)網(wǎng)絡(luò)性能的指標(biāo)并不是網(wǎng)絡(luò)的速率,而是系統(tǒng)網(wǎng)絡(luò)的實時性,即能在多長時間內(nèi)確保所需信息傳輸完成。系統(tǒng)網(wǎng)絡(luò)必須可靠,無論在何種情況下,網(wǎng)絡(luò)通信都不能中斷。另外,為了滿足系統(tǒng)擴(kuò)充性的要求,系統(tǒng)網(wǎng)絡(luò)上實際使用的節(jié)點數(shù)只應(yīng)占可接入最大節(jié)點數(shù)的60%~80%。這樣,一方面可以隨時增加新的節(jié)點,另一方面也可以使系統(tǒng)網(wǎng)絡(luò)運行處于較輕的通信負(fù)荷狀態(tài),以確保系統(tǒng)的實時性和可靠性。在系統(tǒng)實際運行過程中,各個節(jié)點上網(wǎng)和下網(wǎng)隨時可能發(fā)生(特別是各種I/O模件),會經(jīng)常進(jìn)行網(wǎng)絡(luò)重構(gòu),而這種操作絕對不能影響系統(tǒng)的正常運行,因此,系統(tǒng)應(yīng)該具有很強(qiáng)在線網(wǎng)絡(luò)重構(gòu)功能。
2 實現(xiàn)方法
在DCS設(shè)計中,過程控制站和現(xiàn)場I/O模件之間通信的實現(xiàn)方式主要有4種。
2.1 方法1
第1種實現(xiàn)方法如圖1所示:設(shè)計專用智能通信處理模件(CP模件)來主動實現(xiàn)分配到本站內(nèi)所有I/O模件的數(shù)據(jù)交換;DPU和CP模件通過DPRAM方式實現(xiàn)所有輸入、輸出數(shù)據(jù)的交換,DPU在邏輯運行前讀入輸入數(shù)據(jù),并在邏輯運行完畢后輸出數(shù)據(jù)。

圖1 第1種實現(xiàn)方法網(wǎng)絡(luò)架構(gòu)圖
優(yōu)點:DPU可以不用執(zhí)行和I/O模件的通信及報文解析任務(wù),降低了DPU的負(fù)荷;和I/O模件的數(shù)據(jù)交換通過類似于內(nèi)存訪問的模式實現(xiàn)。對現(xiàn)場數(shù)據(jù)的響應(yīng)時間最快只要求到50ms(汽輪機(jī)相關(guān)控制),因此,對I/O層通信速率要求不高,通常RS485或者CAN總線即可滿足要求。
缺點:需要專用模件(CP模件)支撐,會增加一定的成本;對DPRAM的讀寫存在一定幾率的沖突,需要一定的讀寫時序來配合邏輯的實現(xiàn);現(xiàn)場數(shù)據(jù)的響應(yīng)時間隨著I/O模件的接入數(shù)量而變化。
國內(nèi)研制的大部分DCS均采用此實現(xiàn)方式。
2.2 方法2
第2種實現(xiàn)方法如圖2所示:DPU自身實現(xiàn)與現(xiàn)場I/O模件之間的通信以及報文解析任務(wù)。
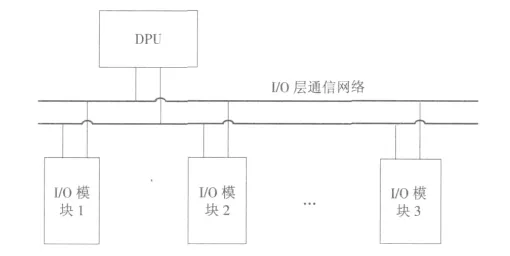
圖2 第2種實現(xiàn)方法網(wǎng)絡(luò)架構(gòu)圖
優(yōu)點:網(wǎng)絡(luò)架構(gòu)簡單,一網(wǎng)到底,沒有中轉(zhuǎn)環(huán)節(jié)。
缺點:DPU自身需要完成邏輯控制、實現(xiàn)與SCADA之間的通信、和冗余DPU之間的數(shù)據(jù)同步、和其他過程控制站之間的通信等任務(wù),還需要增加處理與現(xiàn)場I/O模件之間通信以及報文解析的任務(wù)。因為增加的這個任務(wù)在一個控制周期(典型值200ms)內(nèi)要執(zhí)行多次,平均執(zhí)行周期為200ms/模件,所以,大大增加了DPU的負(fù)荷。
DL/T1083—2008《火力發(fā)電廠分散控制系統(tǒng)技術(shù)條件》中要求:控制處理器設(shè)定在滿足控制對象要求的運算處理周期條件下,負(fù)荷率最高不應(yīng)大于60%,平均負(fù)荷率不超過40%。基本沒有DCS采用此類實現(xiàn)方法。
2.3 方法3
第3種實現(xiàn)方法如圖3所示:整個網(wǎng)絡(luò)中分配數(shù)個CP模件(數(shù)量為1~6),每個CP模件下掛數(shù)個I/O模件(數(shù)量為1~16),各CP模件負(fù)責(zé)實現(xiàn)與下掛在各自I/O通信總線上的I/O模件之間的通信,DPU實現(xiàn)和各CP模件之間的通信。

圖3 第3種實現(xiàn)方法網(wǎng)絡(luò)架構(gòu)圖
優(yōu)點:現(xiàn)場I/O模件的響應(yīng)時間比第1種方法大大提高,最慢響應(yīng)時間可事先確定,基本為16個I/O模件的通信響應(yīng)時間;與第2種方法相比,DPU雖也處理與現(xiàn)場I/O模件之間的通信以及報文解析任務(wù),但在一個控制周期內(nèi)執(zhí)行此任務(wù)的次數(shù)大為降低,最多執(zhí)行6次,對DPU的負(fù)荷影響不大。
缺點:DPU和CP模件之間以及CP模件和I/O模件之間的通信協(xié)議不一樣,增加了研制的難度,成本比第1種實現(xiàn)方法略高。
綜合比較,此實現(xiàn)方法性價比較高,國外DCS基本采用此類實現(xiàn)模式。
2.4 方法4
第4種實現(xiàn)方法如圖4所示:其與第3種實現(xiàn)方法唯一的區(qū)別是增加了1個主CP模件來管理各個子CP模件;此方法結(jié)合了第1種及第3種實現(xiàn)方法的特點。
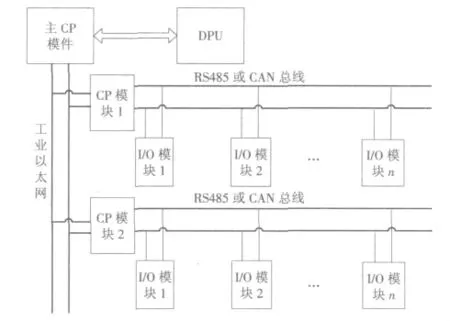
圖4 第4種實現(xiàn)方法網(wǎng)絡(luò)架構(gòu)圖
優(yōu)點:與第1種實現(xiàn)方法相比,此實現(xiàn)方法DPU負(fù)荷相同,但I(xiàn)/O模件的響應(yīng)速度大大提高;與第3種實現(xiàn)方法相比,I/O模件的響應(yīng)速度一致,DPU負(fù)荷略有降低。
缺點:和I/O模件之間的通信通過兩級CP模件管理實現(xiàn),DPU對I/O模件的組態(tài)實現(xiàn)比較復(fù)雜;操作時序以及故障判斷的復(fù)雜性大為增加。
有部分DCS采用此實現(xiàn)方法,但用者較少。
3 結(jié)論
通過列舉過程控制站和現(xiàn)場I/O模件之間通信的4種實現(xiàn)方法,從實時性、經(jīng)濟(jì)性及實現(xiàn)的難易程度等方面進(jìn)行了分析。參照上述分析結(jié)果,用戶可以根據(jù)具體應(yīng)用場合的不同而選擇合適的DCS。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
