平流層飛艇運動分析與仿真
2011-06-06 00:56:36胡國昌吳美平
哈爾濱工程大學學報 2011年11期
胡國昌,吳美平
(國防科技大學機電工程與自動化學院,湖南長沙410073)
由于平流層的戰(zhàn)略地位以及現(xiàn)代科技的進步,平流層飛艇成為近年來各國研究熱點[1].飛艇在高空執(zhí)行特定任務(如偵察、監(jiān)視、通訊等)需要其能夠自主控制以及自主運行.由于飛艇具有與飛機不同的結(jié)構(gòu)特點,因此,在設計控制系統(tǒng)時,需充分掌握飛艇的運動特征.
文獻[2-5]采用牛頓法建立了平流層飛艇非線性動力學模型,而文獻[6-8]采用拉格朗日法也得到了同樣的結(jié)果.以此為基礎,文獻[9-10]進行了穩(wěn)定性和能控性分析,但只研究了在確定參數(shù)條件下的局部能控性,沒有考慮到飛艇運行中參數(shù)易變化的特點.文獻[11-12]研究了飛艇的運動模態(tài)和飛行特點,但其對象為低空飛艇,高空飛艇的情形如何有待進一步分析.總體來講,目前的文獻沒有針對平流層飛艇運動特性從理論上進行較為詳細地分析,而且只研究了局部能控性,運動模態(tài)的分析也較為簡單.基于以上背景,引入大系統(tǒng)中的結(jié)構(gòu)能控性方法[13],綜合分析飛艇穩(wěn)定性、能控性和運動特性,并進行相應的仿真研究,以期對飛艇控制策略的設計提供一定的指導.
1 飛艇動力學模型
1.1 飛艇模型結(jié)構(gòu)
本文研究的平流層飛艇假設為軟式飛艇,呈橢球體外形,尾翼采用“+”結(jié)構(gòu)布局,并且裝有升降舵和方向舵控制舵面,尾部配備推進裝置,底部為吊艙,其兩側(cè)分別安裝涵道風扇,用于實現(xiàn)矢量推進.飛艇整體布局如圖1所示.
1.2 非線性動力學模型及其線性化
由于運行環(huán)境和副氣囊充放氣的影響,飛艇重心位置是變化的,為便于描述其運動,艇體坐標系原點選為體積中心.
為得到有意義的飛艇運動方程和分析其運動特性,采用下列基本假設:
1)在平流層中飛行的飛艇近似為剛體,忽略其彈性效應;
2)飛艇的體積中心與浮心重合;
3)飛艇具有對稱平面 ,且重心在對稱面內(nèi),慣量積.采用拉格朗日法得到飛艇六自由度非線性動力學模型[6-8]:
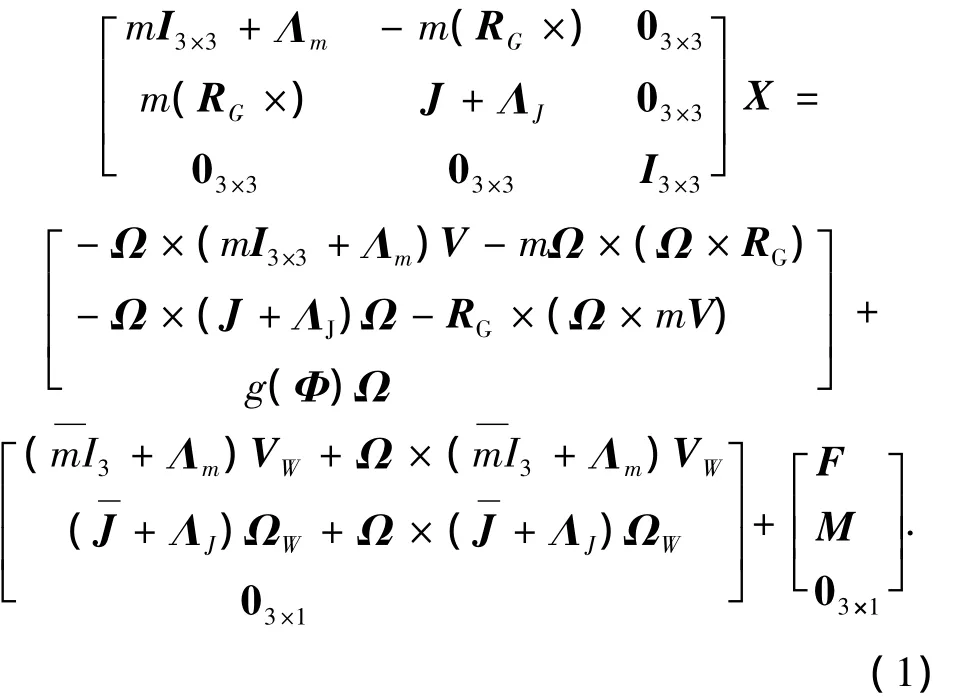
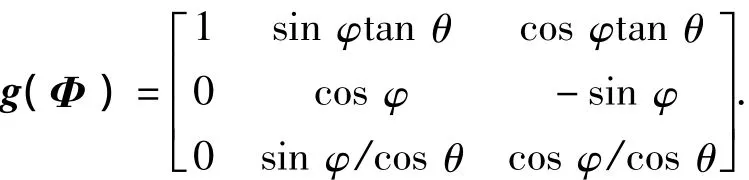
將式(1)寫為標準狀態(tài)方程形式:

式中:f(·)為矩陣形式的非線性函數(shù),控制輸入U=[P FTVTFTVDμyδeδr]T,P 為尾部推進器推力,F(xiàn)TVT、FTVD分別為左右風扇推力之和與之差,μy為風扇繞飛艇橫軸的轉(zhuǎn)角,δe、δr分別表示升降舵偏角、方向舵偏角,d為外界干擾,包括風的作用.各參數(shù)的意義以及作用力的表達式詳見文獻[3].
類似于飛機等飛行器,飛艇的運動可以分為基準運動和擾動運動.基準運動指各運動參數(shù)完全按照預定規(guī)律變化的運動,通常為配平的定常飛行.擾動運動是飛行中受到外界干擾而偏離基準運動的運動.采用小擾動線性化方法對飛艇動力學模型進行線性化,即假設擾動運動相對于基準運動為小偏量,從而略去高階小項使得運動方程為線性的.該方法分2步實現(xiàn):1)設定基準運動,求取相應的控制量.本文假定基準運動設為無傾斜、無側(cè)滑且迎角為零的等速水平直線飛行,2)對原運動方程在基準運動情況下進行一階泰勒展開,即得到飛艇運動線性近似方程:

在本文假設條件下,飛艇線性近似運動方程可以解耦為縱向和橫側(cè)向2個方程:

2 動力學模型穩(wěn)定性分析
2.1 運動穩(wěn)定性及其判定
穩(wěn)定性討論系統(tǒng)運動狀態(tài)受初始擾動后的動態(tài)特性,即研究初值的微小擾動是否會引起系統(tǒng)狀態(tài)軌線無限偏離的問題,是在沒有控制作用時系統(tǒng)自身固有的性質(zhì).由穩(wěn)定性的定義可知[14],求出系統(tǒng)(數(shù)學模型為微分方程組)的通解后,其穩(wěn)定性是比較容易判定的.但是形如式(1)的非線性系統(tǒng)很難求出解析表達式,因此難以判定其穩(wěn)定性.一種解決辦法是采用李亞普諾夫第二方法;另一種方法則是線性近似法.李亞普諾夫第二方法需要找到李亞普諾夫函數(shù),這在非線性系統(tǒng)中是非常困難的.因此本文采用線性近似法,其思路為將非線性系統(tǒng)線性化,進而根據(jù)下面引入的2個定理判斷原系統(tǒng)的穩(wěn)定性.
定理1 如果線性近似系統(tǒng)的特征方程沒有零實部的根,則非線性系統(tǒng)零解穩(wěn)定性與此線性近似系統(tǒng)的穩(wěn)定性相一致[14].
定理2 如果線性近似系統(tǒng)的特征方程有零實部的根,則非線性系統(tǒng)零解的穩(wěn)定性不能由此線性近似系統(tǒng)的穩(wěn)定性確定,此種情形稱為臨界情況,穩(wěn)定性與非線性項有關[14].
2.2 飛艇運動穩(wěn)定性
通過上一小節(jié)的推導,飛艇運動的穩(wěn)定性可由線性近似系統(tǒng)(式(2))進行判斷,而線性近似系統(tǒng)的穩(wěn)定性可直接通過矩陣A的特征值進行判定.
由小擾動線性化過程可知,基準運動不同則線性近似方程也不同.飛艇的基準運動為等速水平直線飛行,前向速度(以下簡稱平衡飛行速度ue)影響特征值.圖2和表1為平衡飛行速度1~45 m/s時縱向運動特征值的變化情況.可知飛艇縱向運動的4個特征值:一個非常接近虛軸的負實根λL1,一個絕對值稍大的負實根λL2,以及一對正實部共軛根λL3、λL4.由于存在實部為正的特征值,飛艇縱向運動不穩(wěn)定.同時,隨著平衡飛行速度增大,λL1變化很小,λL2向負方向變化較小,而 λL3、λL4向正方向變化較大,因此縱向運動穩(wěn)定性進一步變差.
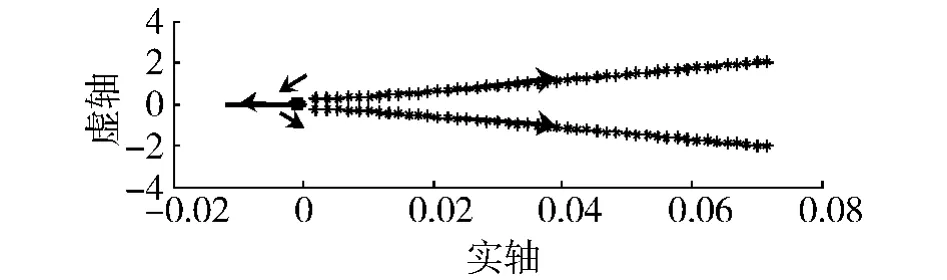
圖2 縱向特征值Fig.2 longitudinal eigenvalue
圖3和表2為平衡飛行速度1~45 m/s時,橫側(cè)向運動特征值變化情況.飛艇橫側(cè)向運動特征值由2 對共軛特征根λS1、λS2和 λS3、λS4組成.由于存在實部為正的特征值,飛艇橫側(cè)向運動不穩(wěn)定.隨著平衡飛行速度增大,λS1、λS2由正實部逐漸變?yōu)樨搶嵅浚⑶邑搶嵅块_始遠離虛軸而后又向虛軸靠近,而λS3、λS4總體上向正方向變化較大,因此縱向運動穩(wěn)定性進一步變差.
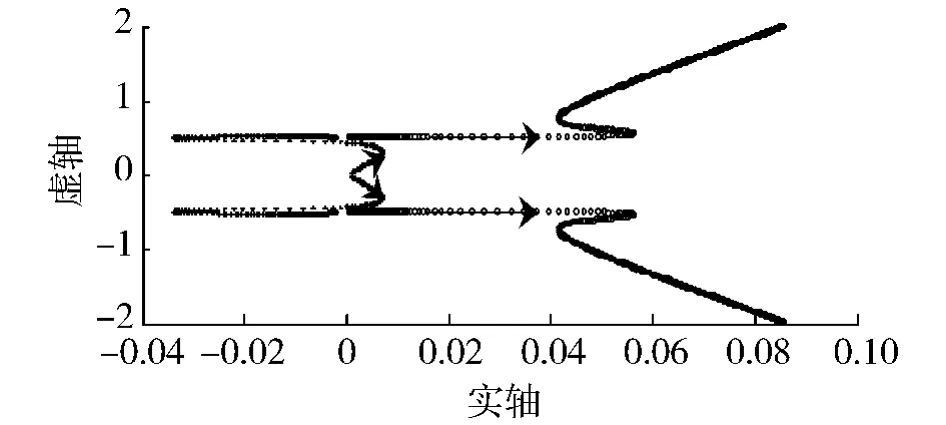
圖3 橫側(cè)向特征值Fig.3 Latitudinal eigenvalue
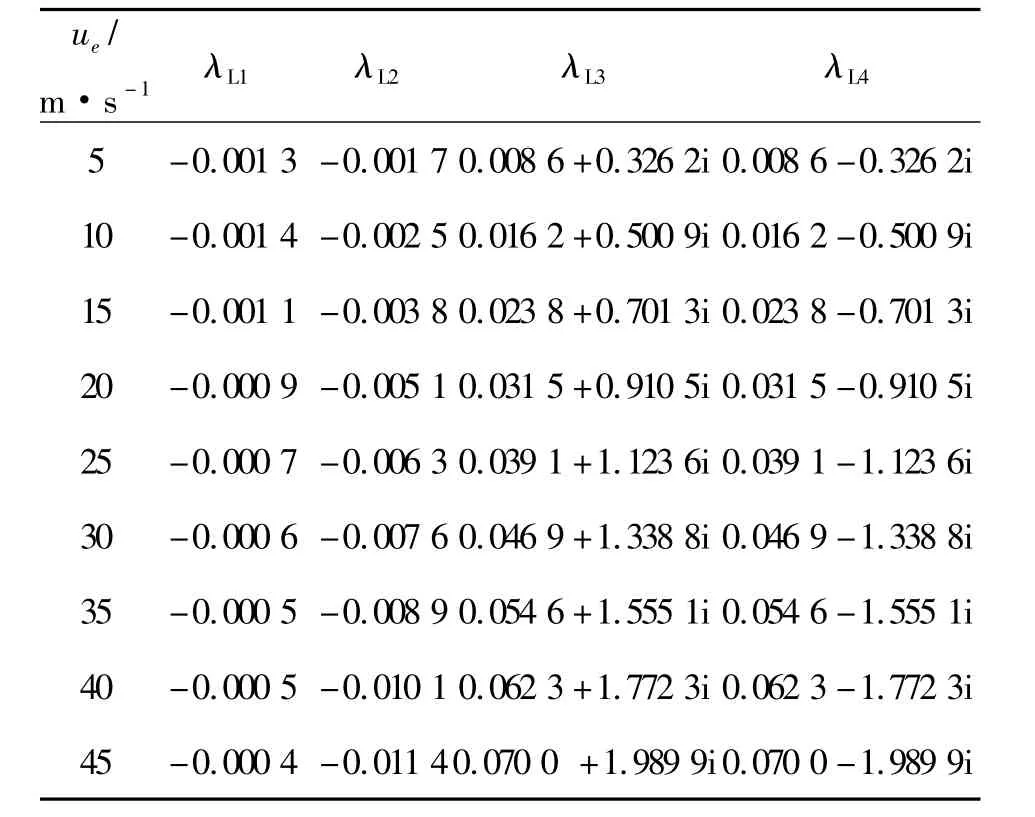
表1 Ue變化時的縱向特征值Fig.1 longitudinal eigenvalue of varying Ue
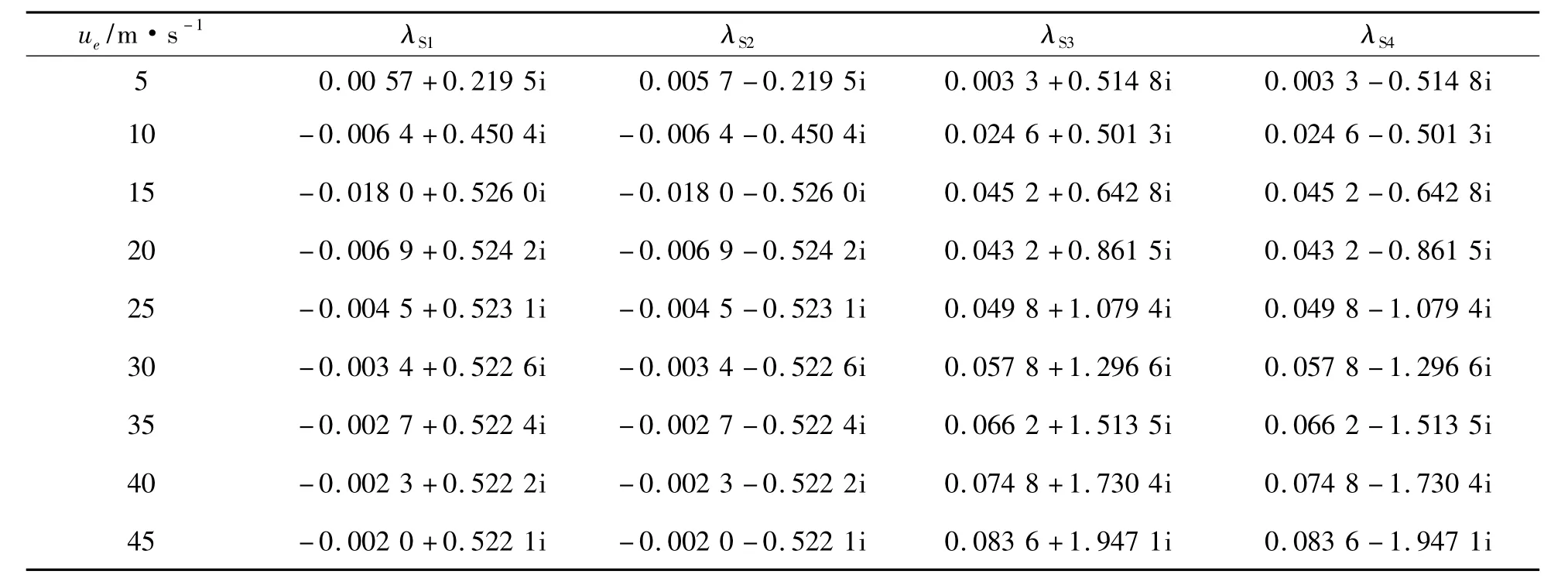
表2 Ue變化時的橫側(cè)向特征值Fig.2 latitudinal eigenvalue of varying Ue
綜上所述,飛艇的縱向和橫側(cè)向運動均不穩(wěn)定,即飛艇運動是不穩(wěn)定的.
2.3 運動模態(tài)
飛艇運動可看成是各個特征值相應運動模態(tài)的一個線性組合,特征向量和初始條件的影響體現(xiàn)于不同運動模態(tài)的“權(quán)重”上[15].由前一節(jié)的討論知:縱向運動分為3個運動模態(tài);而橫側(cè)向運動含有2個運動模態(tài).同一個運動模態(tài)在相同初始條件時,由各特征向量相對大小可知相應運動參數(shù)表現(xiàn)的強弱.為了解各個運動模態(tài),將特征向量進行如下處理[8]:
1)進行無量綱化處理,即將線速度對應的特征向量除以平衡飛行速度Ue,角速度對應的特征向量除以Ue/(VB)1/3(其中VB為飛艇體積),而角度對應的特征向量不變.
2)選定幅值最大特征向量,除以其幅值,使其為單位量,其他的特征向量也除以這一幅值.
3)將2)所得的特征向量畫在圖中.
算例:取平衡飛行速度為18 m/s,則縱向特征值為:0.028 4-0.826 1i、0.028 4+0.826 1i、-0.004 6 和 -0.001 0;橫側(cè)向特征值為:0.041 7+0.774 0i、0.041 7-0.774 0i、-0.009 1+0.525 0i和-0.009 1-0.525 0i.圖 4 和圖 5 為經(jīng)過以上處理得到的縱向和橫側(cè)向特征向量圖(共軛特征值只畫出實部為正的相應的特征向量).
從圖4可知:縱向運動分為擺動、緩慢阻尼和快速阻尼3個運動模態(tài),分別對應(a)~(c)3個子圖,擺動模態(tài)主要由俯仰角速度體現(xiàn),是一不穩(wěn)定模態(tài);快速阻尼模態(tài)則由前向速度體現(xiàn);緩慢阻尼模態(tài)主要體現(xiàn)在俯仰角變化上.從圖5易知:橫側(cè)向運動包含偏航振蕩和滾動衰減2個模態(tài),分別由(a)~(b)個圖體現(xiàn),其中偏航振蕩模態(tài)是發(fā)散的,在偏航角速度中體現(xiàn)得最明顯;而滾動衰減模態(tài)是穩(wěn)定的,主要在滾動角速度中體現(xiàn).同時橫側(cè)向的2種模態(tài)有一定的耦合關系.
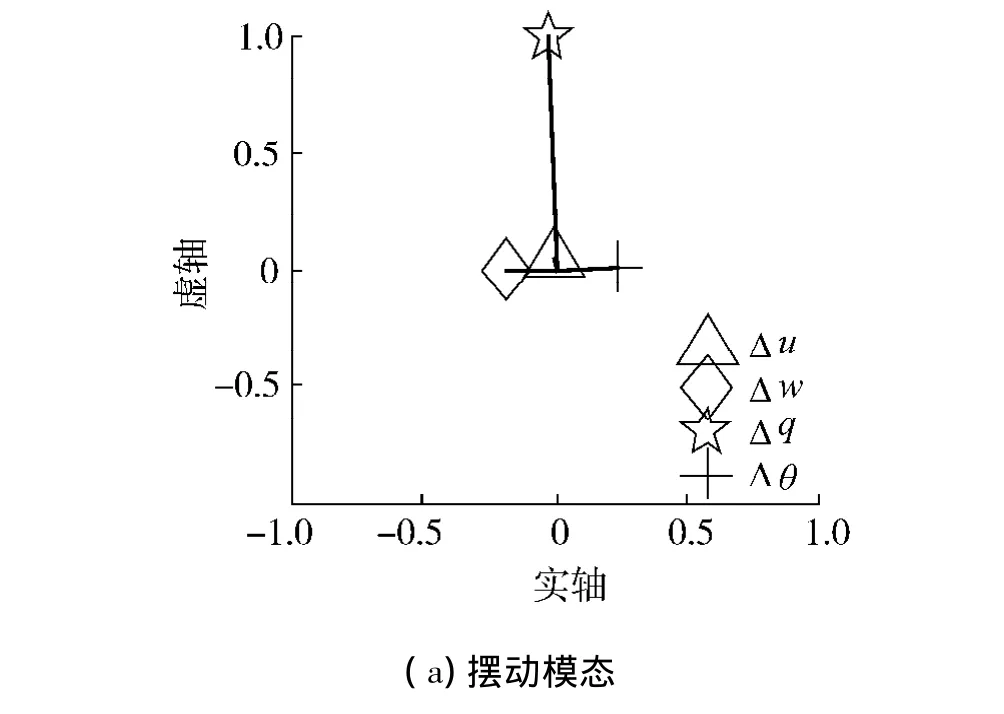
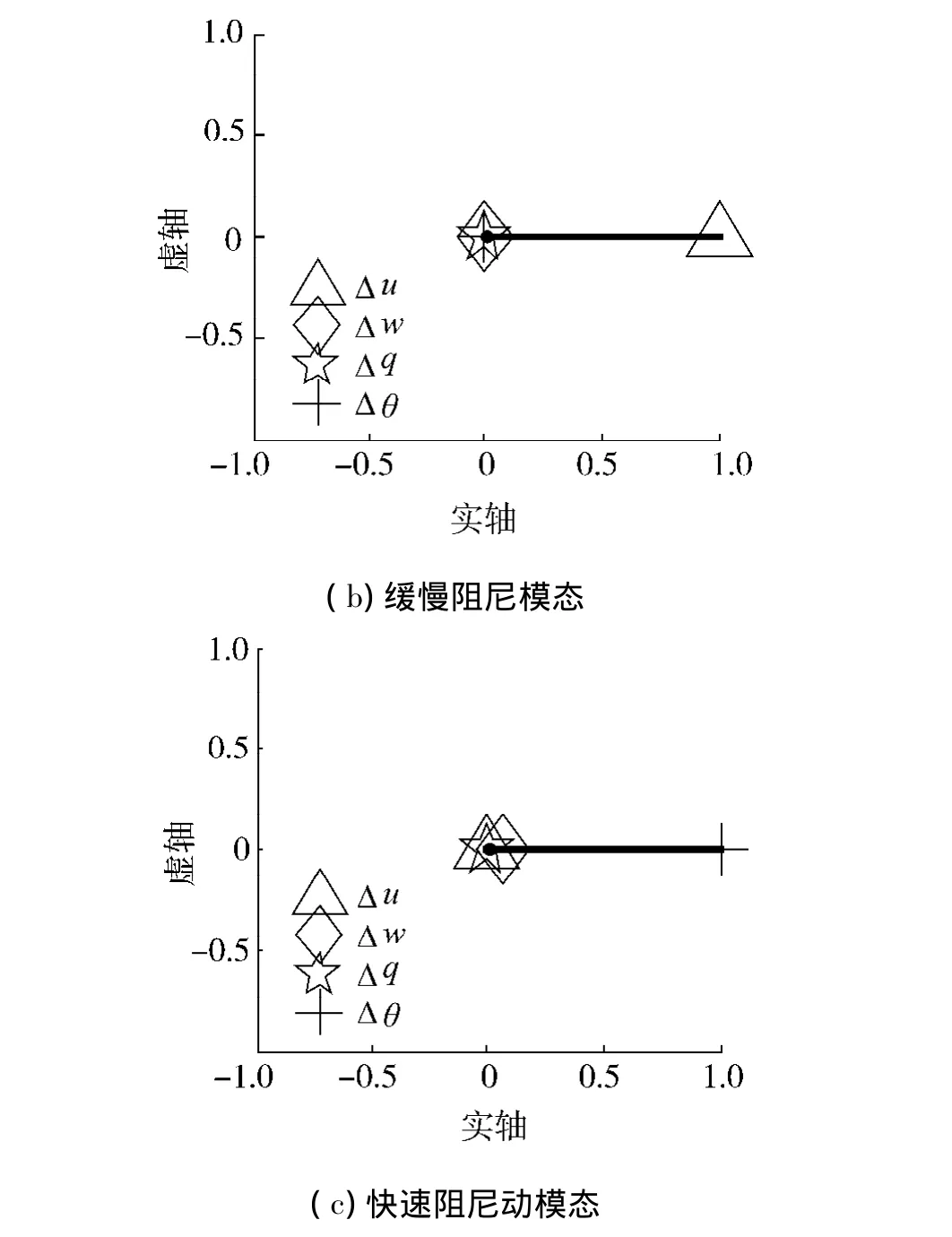
圖4 縱向特征向量Fig.4 Longitudinal eigenvector
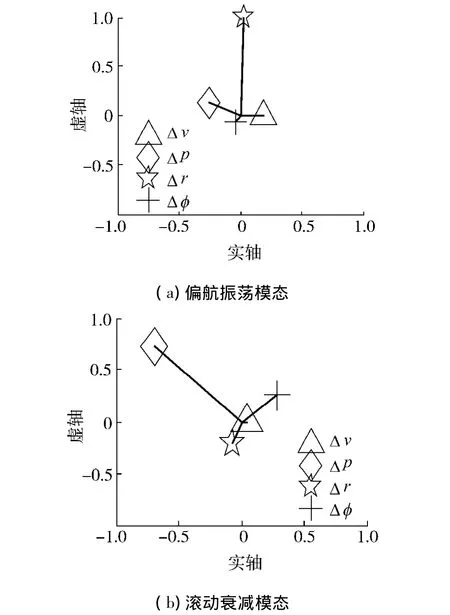
圖5 橫側(cè)向特征向量Fig.5 Latitudinal eigenvector
3 動力學模型結(jié)構(gòu)能控性
飛艇動力學模型是一個典型的非線性系統(tǒng),而非線性系統(tǒng)的全局能控性往往難以衡量,因此常研究其在某一工作點附近的能控性(即局部能控性).局部能控性的判定只能在參數(shù)完全確定情況下進行,而平流層飛艇運行中自身參數(shù)易變化,因此需實時對其進行判斷,這是費時而不必要的工作.所以,本文參考大系統(tǒng)理論的結(jié)構(gòu)分析方法,研究其結(jié)構(gòu)特征及結(jié)構(gòu)能控性,從而克服局部能控性判斷的不足.首先引入一些相關定義和定理.
針對式(2)描述的系統(tǒng),設矩陣A、B中有些元素固定為零元素(由系統(tǒng)實際結(jié)構(gòu)參數(shù)決定的),另一些元素不確定,可以任意取值.
結(jié)構(gòu)能控性:若(A,B)有一個在通常意義上能控的結(jié)構(gòu)等價對,則稱(A,B)結(jié)構(gòu)能控.
r型矩陣:若一個n×m矩陣A,對于滿足不等式m-r≤k≤m的某個數(shù)k,含有(n+m-k-r+1)×k零子矩陣,則稱矩陣A是r型的,記作form(r).
定理3 對于系統(tǒng)(A,B),擴展的能控性矩陣C有form(n2),n為A的維數(shù),則系統(tǒng)不能控.否則系統(tǒng)能控[13].
考慮平流層飛艇動力學模型線性近似以后的縱向和橫側(cè)向的結(jié)構(gòu)能控性,其擴展能控性矩陣均不為form(n2),由定理三知飛艇運動是結(jié)構(gòu)能控的.
4 仿真分析
根據(jù)以上對飛艇的動力學模型的分析,研究其在擾動和控制作用下的運動性能.
4.1 擾動響應
由于垂直方向和側(cè)向初始速度擾動較為常見,因此本文討論飛艇非線性和線性近似模型對這2種初值擾動的響應.仿真條件:初始高度 h0=21 300 m,初始速度u0=18 m/s,其余運動參數(shù)初始值為零.
圖6(a)和(b)分別為非線性和線性近似模型存在Δw的擾動情況下,各運動參數(shù)響應曲線.由于橫側(cè)向運動參數(shù)的響應為零,因此圖中沒有示出.由圖可見,運動參數(shù) u、w、q、θ都出現(xiàn)振蕩,并且逐漸發(fā)散,體現(xiàn)了縱向運動不穩(wěn)定的特點.擾動越大,響應也越大.按照2.3節(jié)對各運動參數(shù)進行相應的無量綱處理方法,則圖6同樣能得到俯仰角速度最能體現(xiàn)擺動模態(tài)的結(jié)論.相同擾動量作用下,同一運動參數(shù)在線性近似模型比在非線性模型中的響應更大,這是由于線性化誤差引起的.
圖6 等速直線平飛對初始擾動Δw的響應Fig.6 Response of the airship to initial disturbance of Δw
圖7(a)和(b)分別為非線性和線性近似模型在存在Δv的擾動時各狀態(tài)變量響應曲線.由圖可見,運動參數(shù)均出現(xiàn)明顯振蕩,并且很快發(fā)散,體現(xiàn)了橫側(cè)向運動的不穩(wěn)定特性.在非線性模型中,雖然只有橫向擾動,但是由于橫側(cè)向和縱向運動的耦合,使得縱向運動參數(shù)也不為0,而且均振蕩和發(fā)散.比較圖7(a)和圖7(b),在相同擾動量作用下,線性近似模型中運動參數(shù)比非線性模型中的響應更大,這是由于存在線性化誤差的原因.圖(a)中的φ、ψ發(fā)散很快,主要是由于縱向和橫側(cè)向運動耦合,交叉影響的緣故.對圖中各運動參數(shù)進行相應的無量綱處理,可知橫側(cè)向的振蕩發(fā)散模態(tài)在偏航角速度中體現(xiàn)得最為明顯.
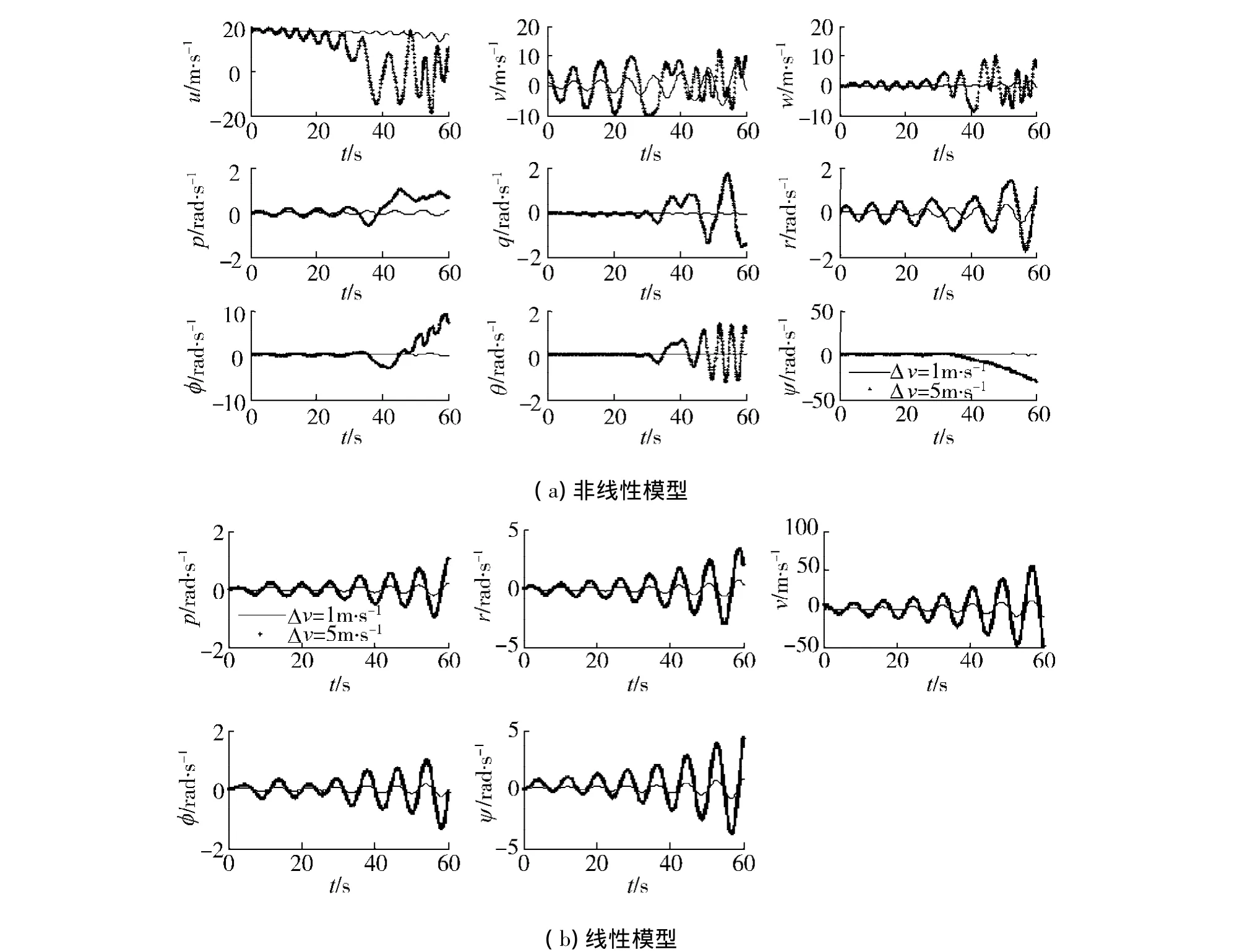
圖7 等速直線平飛對初始擾動Δv的響應Fig.7 Response of the airship to initial disturbance of Δv
綜上所述可知,飛艇運動是不穩(wěn)定的.擺動模態(tài)在縱向運動各參數(shù)中均有明顯的體現(xiàn),而2種阻尼模態(tài)體現(xiàn)得不明顯,這是由于它們的時間常數(shù)大,被擺動模態(tài)掩蓋了.偏航振蕩模態(tài)在橫側(cè)向運動參數(shù)中得到了明顯的體現(xiàn),由于該模態(tài)造成各運動參數(shù)很快發(fā)散,因此滾動振蕩模態(tài)體現(xiàn)得不太明顯.
4.2 控制作用響應
下面分別就升降舵、方向舵和主推力對系統(tǒng)的作用進行分析,其仿真條件同4.1節(jié).
圖8(a)和(b)分別為非線性和線性近似模型存在升降舵偏轉(zhuǎn)的情況下,各運動參數(shù)響應曲線.由于橫側(cè)向運動參數(shù)未受影響,因此圖8(a)中沒有示出.從圖中可知,等速直線平飛時,升降舵正向偏轉(zhuǎn),u、w、q、θ很快出現(xiàn)振蕩,飛艇抬頭向上飛行.并且易知,升降舵偏轉(zhuǎn)越大,振蕩幅度越大.同一運動參數(shù)在相同控制量作用下,線性化模型與非線性模型的響應幅值大小相差不大,說明線性化誤差對控制的影響較小.
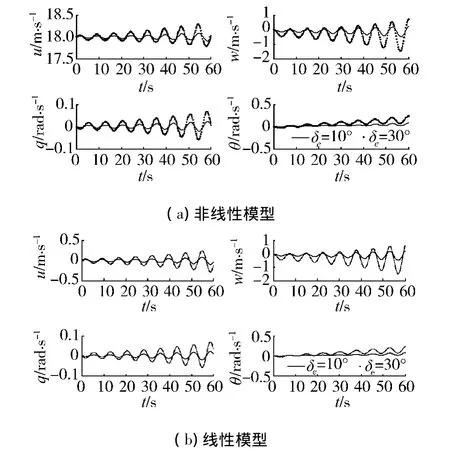
圖8 等速直線平飛對控制作用δe的響應Fig.8 Response of the airship to initial disturbance of δe
圖9為存在方向舵偏轉(zhuǎn)的情況下,飛艇非線性和線性近似模型各運動參數(shù)響應曲線.由圖易知,等速直線平飛時,方向舵偏轉(zhuǎn),飛艇橫側(cè)向和縱向運動參數(shù)均振蕩,但橫側(cè)向參數(shù)振蕩更劇烈些,同時幅度更大.方向舵正向偏轉(zhuǎn),飛艇低頭減速飛行.方向舵偏轉(zhuǎn)越大,振蕩幅度越大.在相同控制量作用下,線性化模型比非線性模型的響應幅值小,這是因為非線性模型中縱向和橫側(cè)向耦合影響所致.
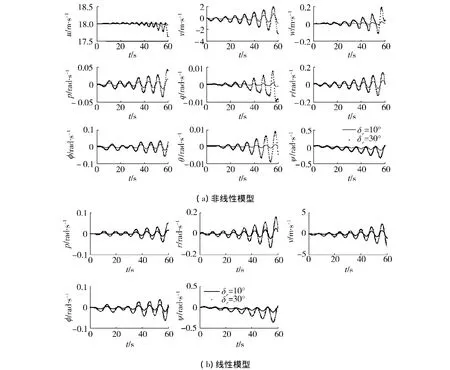
圖9 等速直線平飛對控制作用δr的響應Fig.9 Response of the airship to δr
對水平勻速直線飛行的飛艇施加主推力,其運動參數(shù)變化如圖10所示.由于主推力的方向始終在縱向平面內(nèi),因此施加主推力不會影響橫側(cè)向運動,而前向速度振蕩地增大.主推力作用方向不經(jīng)過飛艇重心,造成俯仰角的振蕩,從而產(chǎn)生垂直方向的速度.主推力對線性近似模型的控制作用與對非線性模型的控制作用大致相當,線性化較為合理.
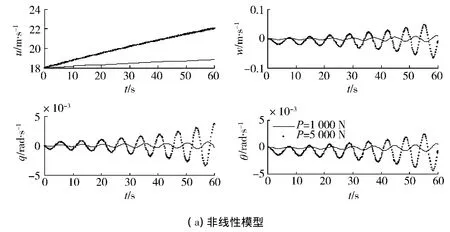
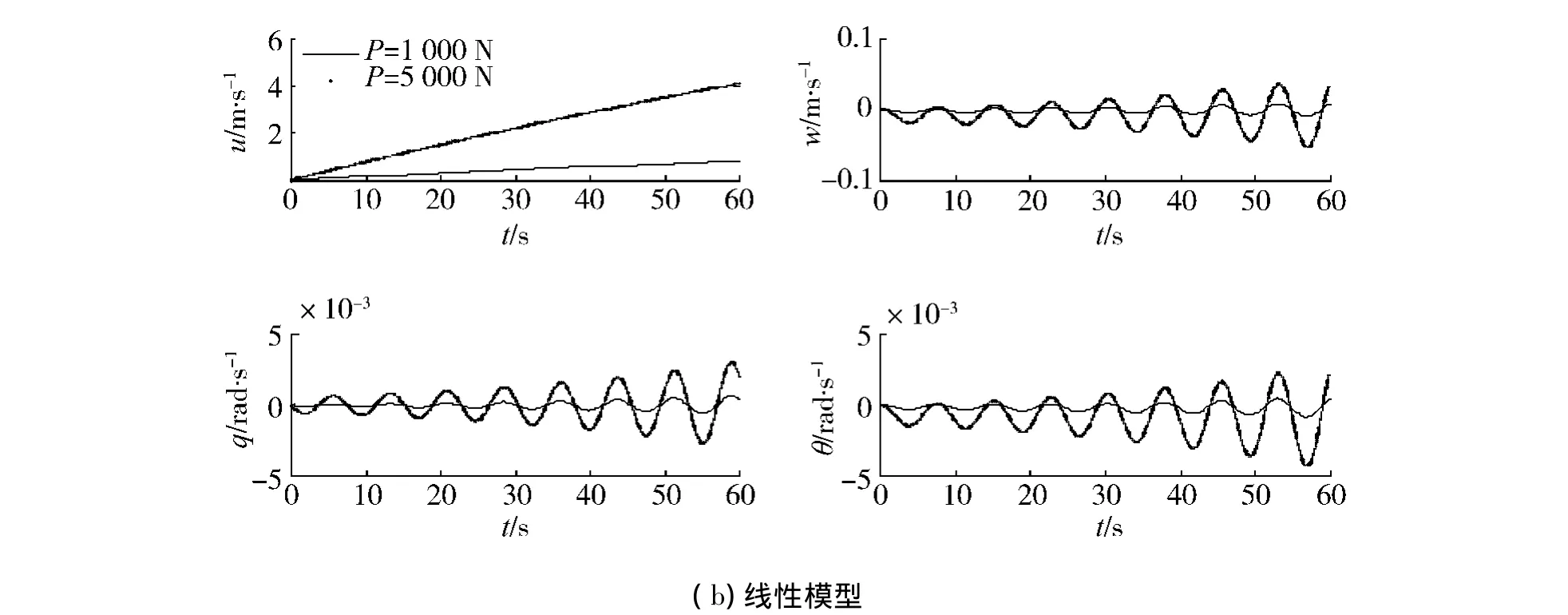
圖10 等速直線平飛對控制作用P的響應Fig.10 Response of the airship to initial disturbance of P
綜上所述,控制機構(gòu)能對飛艇運動很快產(chǎn)生影響,但是由于飛艇運動自身不穩(wěn)定,需要一定的控制算法才能保證其控制性能指標.飛艇縱向和橫側(cè)向可以進行解耦控制,升降舵和主推力進行縱向運動控制,而方向舵控制橫側(cè)向運動.
5 結(jié)束語
掌握平流層飛艇運動特性是對其進行控制的基礎和前提.本文以某平流層飛艇動力學模型為基礎,分析了穩(wěn)定性,討論了運動模態(tài),同時研究了結(jié)構(gòu)能控性.在此基礎上,對初值擾動和控制作用下飛艇的運動特性進行了仿真分析,得出如下主要結(jié)論:飛艇運動不穩(wěn)定,縱向的擺動模態(tài)以及橫側(cè)向偏航振蕩模態(tài)占支配作用;飛艇動力學系統(tǒng)結(jié)構(gòu)能控,升降舵、主推力影響縱向運動參數(shù),方向舵控制橫側(cè)向運動參數(shù);對非線性動力學模型進行線性化進而解耦為縱向和橫側(cè)向2個子系統(tǒng)是合適的;線性化誤差對初值擾動的響應影響較大,而對控制作用的影響很小.
[1]曹秀云.近空間飛行器成為各國近期研究的熱點(上)[J].中國航天,2006,6:32-35.
[2]KHOURY G A,GILLET J D.Airship technology[M].London,Cambridge University Press,1999:58-70.
[3]MUELLER J B,PALUSZEK M A.Development of an aerodynamic model and control law design for a high altitude airship[C]//.AIAA Unmamed Unlimited Conferene.Chicago,USA,2004.
[4]歐陽晉.空中無人飛艇的建模與控制方法研究[D].上海:上海交通大學,2003:23-78.
OUYANG Jin.Research on modeling and control of an unmanned airship[D].Shanghai:Shanghai Jiao Tong University,2003:23-78.
[5]王海峰,宋筆鋒,鐘小平.飛艇運動建模與仿真驗證[J].飛行力學,2009,27(1):31-35.
WANG Haifeng,SONG Bifeng,ZHONG Xiaopin.Modeling and simulation verification of motion for an airship[J].Flight Dynamics,2009,27(1):31-35.
[6]AZINHEIRA J R,MOUTINHO A.Influence of wind speed on airship dynamics[J].AIAA Journal of Guidance,Control and Dynamics,2002,25(6):1116-1124.
[7]AZINHEIRA J R,MOUTINBO A.Erratum-influence of wind speed on airship dynamic[J].AIAA Journal of Guidance,Control and Dynamics,2008,31(2):443-444.
[8]MOUTINHO A B.Modeling and nonlinear control for airship autonomous flight[D].Lisbon:University of Lisbon,2007:33-78.
[9]王曉亮,單雪雄.飛艇穩(wěn)定性和能控性分析[J].計算機仿真,2005,22(8):40-44.
WANG Xiaoliang,SHAN Xuefei.Analysis of stability and controllability of airship[J].Computer Simulation,2005,22(8):40-44.
[10]LI Y W,MEYER N.Modeling and simulation of airship dynamics[J].Journal of Guidance,Control,and Dynamics,2007,30(6):1691-1700.
[11]歐陽晉,屈衛(wèi)東,席裕庚.輕于空氣的飛艇縱向運動的分析及仿真[J].上海交通大學學報,2003,37(6):961-963.
OUYANG Jin,QU Weidong,XI Yugeng.Longitudinal motion analysis and simulation for Lighter-than-air(LTA)airship[J].Journal of Shanghai Jiao Tong University,2003,37(6):961-963.
[12]LIU Y,HU Y M,WU Y L.Stability and control analysis based on airship dynamic modeling[C]//Proceedings of the IEEE International Conference on Automation and Logistics.Jinan,China,2007:2744-2748.
[13]王翼,張朝池.大系統(tǒng)控制:方法和技術[M].天津:天津大學出版社,1993:77-100.
[14]胡躍明.非線性控制系統(tǒng)理論與應用[M].北京:國防工業(yè)出版社,2005:153-170.
[15]鄭大鐘.線性系統(tǒng)理論[M].2版.北京:清華大學出版社,2002:98-101.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
核科學與工程(2015年4期)2015-09-26 11:59:03
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39