缸內壓力原始測量信號的處理方法*
2011-06-06 10:06:00林瑞霖
艦船電子工程 2011年10期
關鍵詞:信號
劉 琦 林瑞霖
(海軍工程大學船舶與動力學院 武漢 430033)
1 引言
柴油機的缸內壓力直接反映柴油機的工作性能,包括進氣過程的好壞、噴油定時是否準確、氣閥間隙是否合適、氣缸的氣密性的好壞、燃料燃燒的完整程度等[1]。因此,測取壓力信號可以對柴油機的工作狀態進行檢測。通過缸內壓力信號對柴油機進行故障診斷,主要是通過從缸內壓力信號中提取出缸內溫度、壓力升高率、燃燒放熱率等隨曲軸轉角的變化規律[2]。但是,通過壓力傳感器測取的原始缸內壓力信號是混有很多噪聲的電壓信號,能否有效地從中提取出隨曲軸轉角變化的比較光滑的壓力信號,對判斷柴油機工作是否正常和診斷柴油機的故障類型至關重要。
2 對原始測量信號處理的流程
1)等曲軸轉角化
對壓力信號的采樣是通過壓力傳感器所采集的等時間間隔的信號,而對柴油機工作狀態的分析是通過等曲軸轉角的壓力信號實現的[3],所以,必須對等時間間隔采樣的信號進行等曲軸轉角處理。壓力傳感器在柴油機曲軸的各個輪齒轉動過程中所采集的信號個數為

其中,Z為柴油機曲軸一圈輪齒的個數;fs為壓力傳感器的采樣頻率;ni為曲軸在經過不同輪齒時的瞬時轉速;x(Zi)為不同輪齒時壓力傳感器所采集的信號個數。
根據各個輪齒間采樣點的信號,通過Newten插值公式求出等曲軸轉角的壓力傳感器信號,Newten插值算法如下[4]:
采集信號的精度取決于壓力傳感器的頻率和柴油機轉速,轉速越低,采樣頻率越高,信號的準度越高。
2)多循環平均
柴油機的做功過程是通過燃料的燃燒產生高溫高壓氣體,推動活塞做功。對于四沖程柴油機,每一個做功循環都經歷吸氣、壓縮、燃燒做功和排氣沖程,根據這個順序周而復始地進行工作,每個工作循環都經歷度曲軸轉角[5]。即使在穩定工況下,柴油機工作中的各個不同循環,缸內壓力信號也會出現波動[6]。因此,為了減小隨機誤差和噪聲干擾,必須對測取的缸內壓力信號進行多循環平均。多循環平均的算法如下:其中,θ為曲軸轉角;Vi(θ)為隨曲軸轉角變化的壓力傳感器信號;N為循環數;ˉV(θ)為平均化處理后的壓力傳感器信號。

3)標定
壓力傳感器輸出的是電壓信號,而要得到缸內壓力信號,需要對壓力傳感器進行標定,根據標定結果,將采集的電壓信號轉化為壓力信號。壓力傳感器的輸出信號隨壓力的大小呈線性變化,利用最小二乘法對壓力傳感器進行標定,標定算法為,設

求滿足

的α、b,其中α、b分別為壓力傳感器的放大倍數和零點漂移,V、P(V)分別為壓力傳感器輸出的電壓信號和所要得出的缸內壓力信號。
4)光順處理
壓力傳感器采集的缸內壓力信號之中混有很多高頻的噪聲干擾,即使進行了多個循環的平均,壓力信號的毛刺依然很大;計算放熱率要求P-θ曲線是可導的,但是由于壓力值采集誤差,以及其他誤差等原因,常常使壓力數據并不滿足可導的條件。由于以上原因,用數學方法計算的dQ-dθ曲線一般會產生較大的震蕩[7]。所以,必須將平均化以后的壓力信號進行光順處理。
光順處理的方法很多,可采用樣條函數、最小二乘法、正交多項式法、五點三次平滑法等。五點三次平滑法的算法如下[8]:
以上即為對壓力傳感器所采集的原始信號的處理流程。
3 實驗平臺介紹
本實驗是在6135非增壓四沖程柴油機上進行的,轉速置為1000r/min,負載400Nm,6135柴油機 的 發 火 順 序 為 1-5-3-6-2-4,壓 力 傳 感 器 采 用HEM375耐高溫壓力傳感器,采樣頻率為65536Hz,實驗采集了2號缸40個循環的壓力信號進行分析。
4 數據分析
1)在轉速1000r/min,負載400Nm的工況下,采集的40個循環的缸內壓力原始數據和單個循環的缸內壓力原始數據分別如圖1和圖2。從圖1可以看出,即使在穩定工況下,各個不同循環的缸內壓力信號波動依然很大,其中最高爆發壓力的波動達到31.6%。單缸的缸內壓力信號在不同做功階段受噪聲干擾均比較大,其中以低壓段的表現最為明顯,如圖2,這主要由于高壓段壓力信號占主導,而低壓段噪聲信號的比例相對高壓段高。
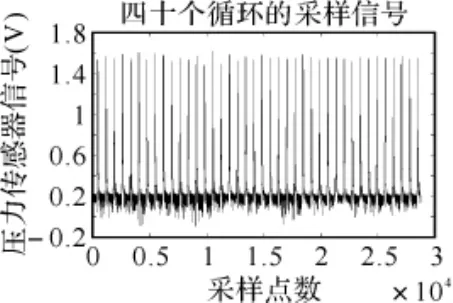
圖1 40個循環的缸內壓力信號
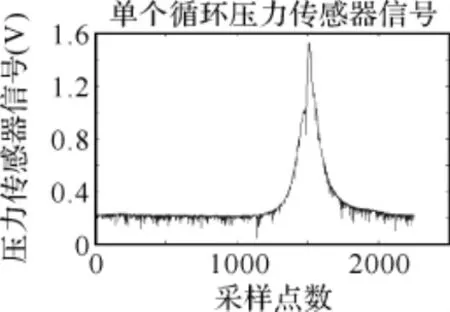
圖2 單個循環的缸內壓力信號
2)按照等曲軸轉角化的算法,將等采樣頻率的壓力傳感器信號轉化為等曲軸轉角的信號,結果如圖3,可以看出,經過等曲軸轉角化后,更加能清楚地反映柴油機在不同做功階段的壓力變化規律。
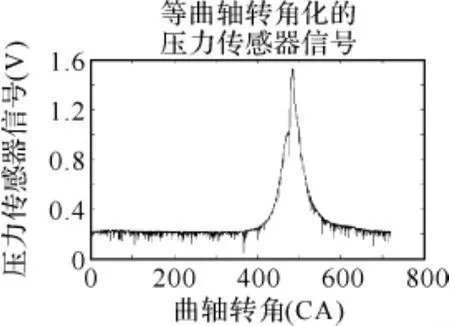
圖3 等曲軸轉角化的壓力傳感器信號
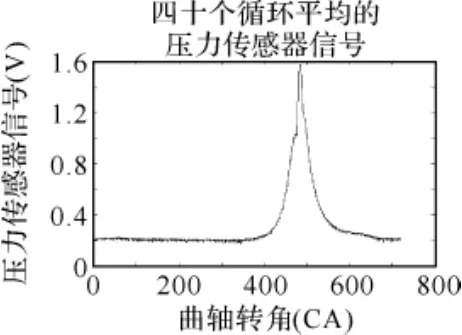
圖4 40個循環平均的壓力傳感器信號
3)按照多循環平均算法,對40個循環的壓力傳感器信號作平均化處理,結果如圖4,可以看出,經過多循環平均處理后,信號的隨機誤差明顯減小,信號相對平滑。
4)按照光順算法,分別對平均化以后的壓力傳感器信號進行一次、二次、三次光順處理,如圖5。可以看到,隨著光順次數的增加,信號越來越平滑[9],但是三次光順以后,信號在低壓段(包括壓縮段)的噪聲干擾仍然很大。為有效減少信號在低壓段的噪聲干擾,對信號進行六次光順,信號在低壓和高壓段均比較平滑,但卻使信號的一些特征點不明顯,如壓縮拐點消失,信號的峰值誤差也加大,信號的峰值壓力誤差達到5%,如圖5。針對壓力信號在高壓段有用信號占主導,而在低壓段噪聲干擾大的特點,本文選擇對高壓段和低壓段分別采用三次光順和六次光順的方法進行處理,結果如圖6,可以看到,處理后的結果既保持了原始信號的特征點,又使峰值的誤差比較小,峰值壓力誤差為0.88%。
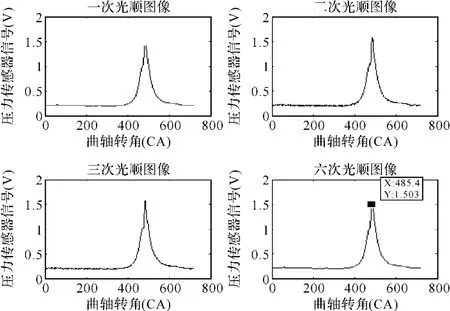
圖5 不同光順次數的缸內壓力信號對比
5)按照最小二乘算法,對壓力傳感器進行標定。所采用的標定點如表1。
最小二乘法標定曲線如圖7,由圖可見,壓力傳感器的線性度比較好,標定的結果為,
P(V)=5.2193V+1.0238 (7)
利用式(7)的標定結果,對壓力傳感器所測量的壓力信號進行標定,得到最終的缸內壓力隨曲軸轉角變化的結果,如圖8所示。
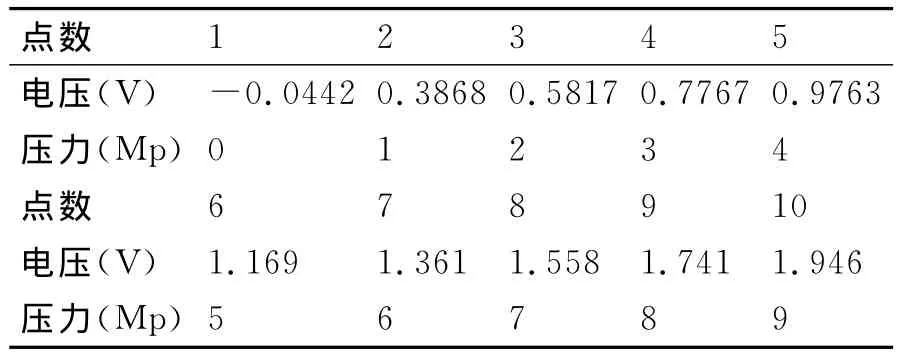
表1 標定點的選取
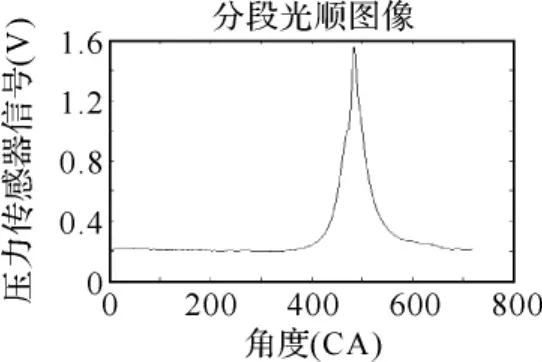
圖6 分段光順的缸內壓力信號
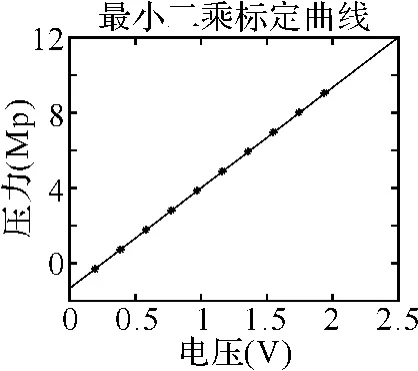
圖7 最小二乘法標定曲線
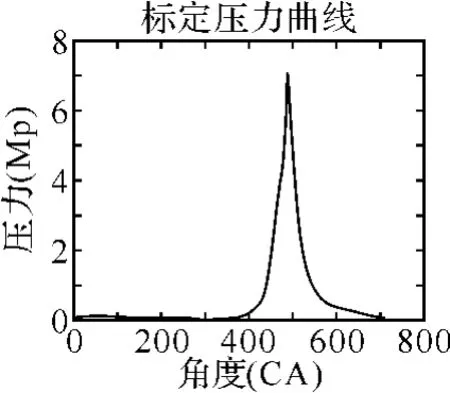
圖8 壓力曲線標定結果
6)本文對比了不同光順方法對壓力升高率計算的影響,如圖9,可以看出,壓力信號未經過光順處理,得出的壓力升高率曲線毛刺比較大[10],經過五點三次光順后,壓力升高率曲線高壓段毛刺較小,而低壓段毛刺依然很大,分段光順后,以壓縮終點為零度轉角,計算的缸內壓力升高率曲線在低壓和高壓段均比較平滑,并且根據分段光順的壓力曲線,由理想氣體狀態方程計算的壓縮段缸內溫度曲線也比較平滑。
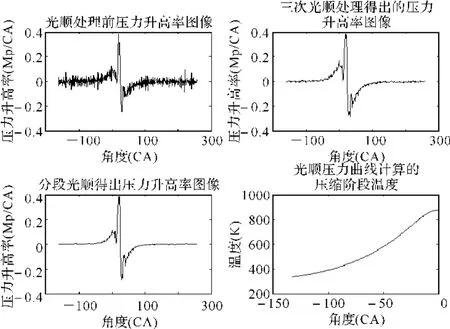
圖9 不同光順方法對壓力升高率計算的影響以及根據分段光順壓力計算的壓縮階段溫度
5 結語
1)對壓力傳感器測量的原始缸內壓力信號經過等曲軸轉角化、多循環平均、光順處理和標定以后,可以得到滿足故障診斷需要的缸內壓力數據。
2)采用分段光順方法對壓力數據進行處理可以使壓力曲線在高壓和低壓段均比較平滑,而且保持了壓力曲線的特征點,減小了峰值誤差。
[1]郭江華,侯馨文,陳國鈞,等.船舶柴油機故障診斷技術研究[J].中國航海,2005(4):75
[2]黃碧華,裘崇偉,謝友柏.柴油機磨損狀態監測及故障診斷專家系統知識庫建立的研究[J].摩擦學學報,1994,45:36
[3]潘峰.船舶主推進柴油機示功圖識別專家系統的研究[D].武漢理工大學碩士學位論文,2007(5):15
[4]何漢林,梅家斌.數值分析[M].北京:科學出版社,2007(2):130
[5]周龍寶,高宗英.內燃機學[M].北京:機械工業出版社,2009(2):16
[6]林瑞霖,孫云嶺.基于瞬時轉速相關分析的柴油機工作均勻性檢驗[J].內燃機,2006,8(4):19
[7]曹國豪.船舶柴油機示功圖測量系統研制[D].武漢理工大學碩士學位論文,2009(5):6
[8]孫怡,潛偉建,夏志瀾,等.在柴油機放熱曲線計算中兩個關鍵問題的解決方法[J].海軍工程大學學報,2001,6(13):86
[9]葉劍.135柴油機燃燒過程數值模擬[D].大連理工大學碩士學位論文,2008(12):32
[10]Ryuichi Kimura,Noboru Nakai,Hiroshi Mizutani.Diagnostic System of Diesel Engine by Statistical Vibration Analysis[R].Bulletin of the M.E.S.J,1966,24(1):14~20
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
