基于遺傳算法的目標(biāo)設(shè)定式電磁掃雷具結(jié)構(gòu)研究*
2011-06-06 10:05:40劉旭東
艦船電子工程 2011年10期
劉旭東 閆 勇
(海軍蚌埠士官學(xué)校 蚌埠 233012)
1 引言
隨著信號處理技術(shù)的發(fā)展,水雷引信對目標(biāo)信號的采集和處理方法日新月異。具體到磁引信的設(shè)計,三軸磁場的采集和處理已經(jīng)是最為基礎(chǔ)的方法。這使得水雷對目標(biāo)的識別達(dá)到了前所未有的高度,老式電極式掃雷具和螺線管掃雷具基本不能掃動這類水雷[1~2]。在這個背景下,各國都在大力發(fā)展目標(biāo)設(shè)定式電磁掃雷具,考慮其工程實現(xiàn)情況,目前服役的目標(biāo)設(shè)定式電磁掃雷具基本采用單軸磁矩可控磁體[3~6],即帶鐵芯的通電螺線管進(jìn)行掃雷具的設(shè)計,使用幾個可控磁矩磁體完成對目標(biāo)磁場的模擬,這種方式是否能達(dá)到我們所期望的目標(biāo),是否有改進(jìn)的方法,本文就此問題開展討論。
2 現(xiàn)有結(jié)構(gòu)的目標(biāo)設(shè)定式電磁掃雷具磁場模擬效果
目標(biāo)設(shè)定式電磁掃雷具中使用的可控磁體多為一維磁矩,所以在對其進(jìn)行建模時,可以使用一個軸向偶極子的磁場模型。但是考慮到掃雷具工作時一般存在一個工作深度,在作戰(zhàn)海域深度相對不深時,這樣掃雷具各磁體形狀相對水雷處的影響不可以忽略,不能等效為偶極子,而更合適將其等效為旋轉(zhuǎn)橢球體模型,為了模型的廣泛性,對掃雷具建模這里選取旋轉(zhuǎn)橢球體磁場模型[7]。
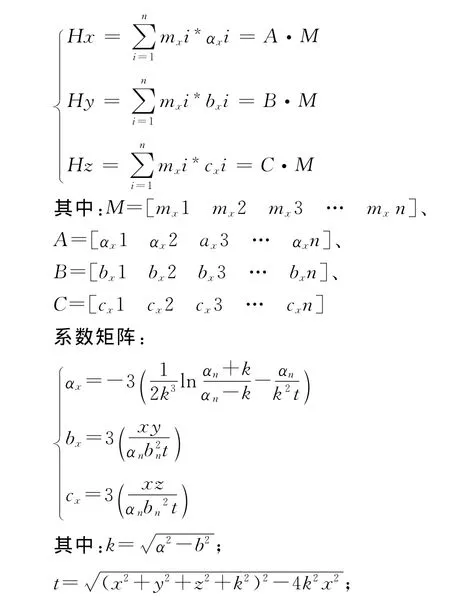
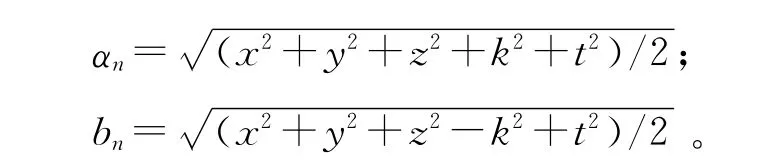
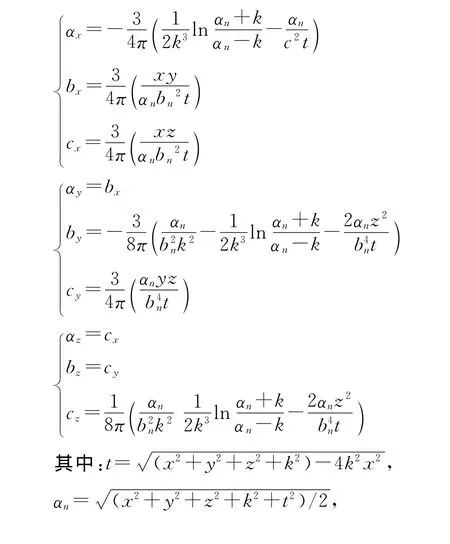
空間任一點(x,y,z)的磁場:
采用此模型對,下面通過仿真實驗考察掃雷具對接艦船磁場的模擬效果。仿真使用數(shù)據(jù):利用一型潛艇和一型護(hù)衛(wèi)艦實測磁場數(shù)據(jù),在24m深度上,均勻分布于右舷、龍骨和左舷,左右橫距都為12m的三條磁場數(shù)據(jù)。取n的值為5~9,分別利用模型對艦船磁場擬合,各磁體均勻分布在在船艏到取n的值為5~9,分別利用模型對艦船磁場擬合,各磁體均勻分布在船艏到船艉,位于龍骨上方吃水線上。

表1 擬合誤差分布表
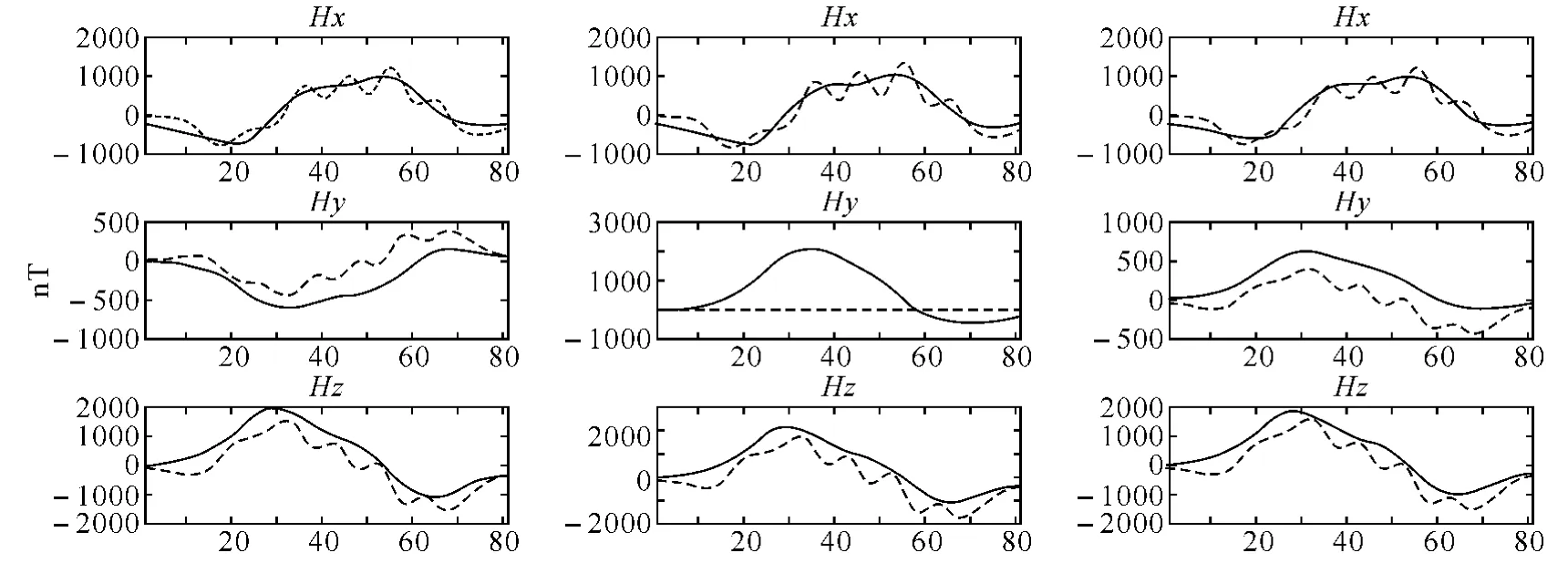
圖1 n為6時的目標(biāo)磁場擬合曲線
從仿真結(jié)果表1可知,利用單軸磁體對目標(biāo)磁場進(jìn)行擬合時,磁體數(shù)目大于等于7個,總體誤差范圍在0.004內(nèi),可以認(rèn)為再增加磁體數(shù)目不能帶來更精確的擬合效果。分析其原因可以從表1中發(fā)現(xiàn),在擬合結(jié)果中正橫方向上的磁場誤差較大,且在增加磁體數(shù)目過程中沒有較大的改善。
從表1中可得知,總體誤差值在增加磁體后沒有隨之增加的原因在于在Y軸方向上的誤差值較大,且沒有隨著磁體的增加而有明顯的改進(jìn)。從圖1中可以發(fā)現(xiàn)在龍骨下的Y軸方向上磁場份量的大小為0,由于磁場的分布式連續(xù)性的,可以推測,這會使得在掃雷過程中在龍骨下方產(chǎn)生一個死區(qū);同時在同一正橫距離的磁場曲線上,X軸方向和Z軸方向上的曲線的相似度極高。
這些問題的產(chǎn)生可以歸其為一個原因,目前使用的目標(biāo)設(shè)定式掃雷具的結(jié)構(gòu)為單軸磁體串聯(lián)結(jié)構(gòu),只是在X軸方向上存在磁矩,故在龍骨下方的Y軸磁場份量較小;而掃雷具結(jié)構(gòu)在X軸方向上是對稱的,是的X軸和Z軸方向上的磁場曲線的相似度較高。這兩個缺陷都可以被水雷引信采取閾值判斷和相關(guān)性判斷判斷目標(biāo)為非艦船信號,從而使得目標(biāo)設(shè)定式掃雷具達(dá)不到預(yù)先的戰(zhàn)術(shù)目的。
3 結(jié)構(gòu)改進(jìn)方法及建模
從上述的分析得知,要提高目標(biāo)設(shè)定式掃雷具的磁場擬合效果和解決死區(qū)的問題,需要的不是增加磁體的個數(shù),而是打破現(xiàn)有的目標(biāo)設(shè)定式掃雷具的結(jié)構(gòu)。既要考慮到增加Y軸方向上的磁矩,使得掃雷具可以在龍骨下方產(chǎn)生足夠大的磁場,消除死區(qū);同時還需要破壞目標(biāo)設(shè)定式掃雷具在X軸上的對稱性,使得X軸和Z軸方向上的磁場曲線的相似度減小,基于這個設(shè)想,將目標(biāo)設(shè)定式掃雷具做如下改變。
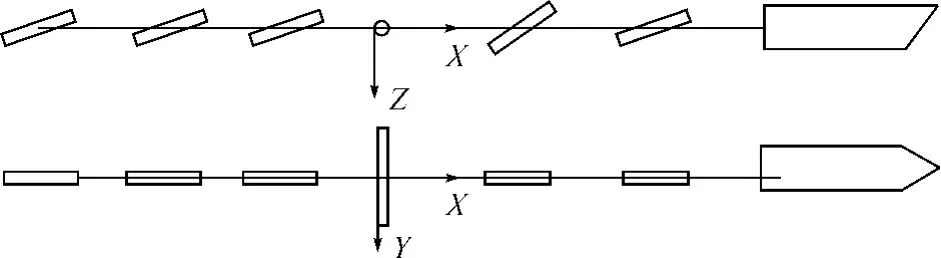
圖2 模式磁體結(jié)構(gòu)效果
掃雷具的磁體個數(shù)為6個,將6個磁體中的一個橫向放置(圖2),這樣一來就產(chǎn)生了一個Y軸磁矩,應(yīng)該可以在一定程度上提高橫向Y分量的擬合精度。同時改變另外5個磁體的狀態(tài),使得其在XZ平面上產(chǎn)生一定的仰角,且仰角的度數(shù)不同,破壞掃雷具在X軸上的對稱型。
采取這種結(jié)構(gòu)時,目標(biāo)設(shè)定式掃雷具的磁場模型方程為。
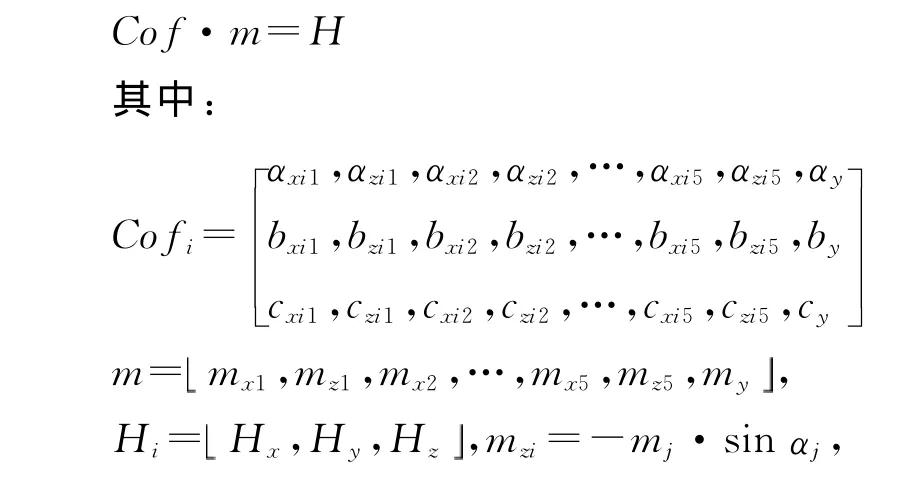
mxj=mj·cosαj,my=m6,j取值為1~5,分別指5個磁體,i為數(shù)據(jù)點數(shù)。
系數(shù)矩陣

4 數(shù)據(jù)驗證及分析
針對改進(jìn)后的模型,借助GA算法對5個磁體仰角、橫向放置磁體的縱向坐標(biāo)進(jìn)行最優(yōu)搜索,通過最小二乘法,求得各磁體的單軸磁矩,然后以求得的參數(shù),對目標(biāo)艦船磁場進(jìn)行擬合,表是以改進(jìn)結(jié)構(gòu)對目標(biāo)艦船的擬合誤差[7~9,12]。
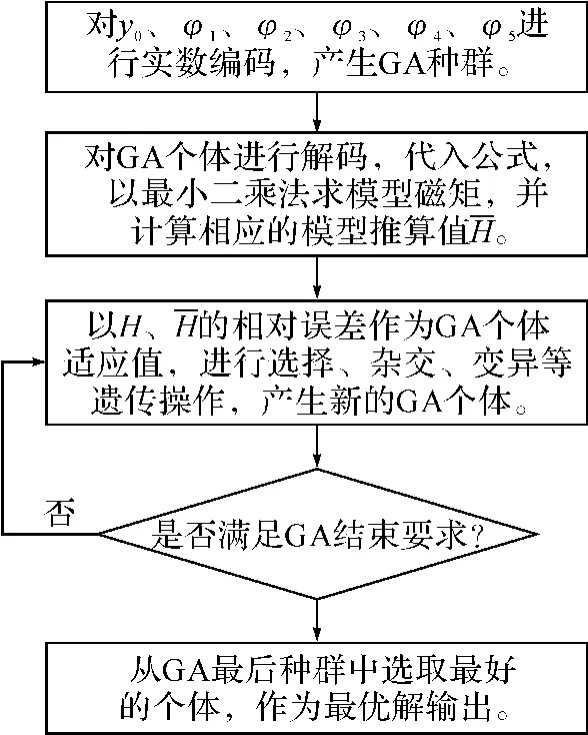
圖3 基于GA的定位計算流程
結(jié)果分析:采用改進(jìn)后的結(jié)構(gòu)對整個空間三條磁場數(shù)據(jù)的擬合總體誤差為0.138,比前面6個磁體方向一致時的總體擬合誤差有稍微增加,但是可以發(fā)現(xiàn)就Y分量而言,精度提高很大,考慮綜合指標(biāo),該結(jié)構(gòu)在一定意義可以消除掃雷死區(qū),又有很高的擬合精度,所以這種結(jié)構(gòu)可以滿足目標(biāo)設(shè)定掃雷具的戰(zhàn)技指標(biāo)。

表2 改進(jìn)后擬合誤差分布情況
結(jié)果分析:利用該模型對整個空間三條磁場數(shù)據(jù)的擬合總體誤差為0.138,比前面6個磁體方向一致時的總體擬合誤差有稍微增加,但是可以發(fā)現(xiàn)就Y分量而言,精度提高很大,考慮綜合指標(biāo),該結(jié)構(gòu)在一定意義可以消除掃雷死區(qū),又有很高的擬合精度,所以這種結(jié)構(gòu)可以滿足目標(biāo)設(shè)定掃雷具的戰(zhàn)技指標(biāo)。
5 結(jié)語
通過充分的理論分析與仿真實驗,證實了結(jié)構(gòu)改進(jìn)后的電磁掃雷具,實現(xiàn)了利用少數(shù)個單軸磁矩磁體對目標(biāo)空間磁場的高精度擬合,且較易于實際工程實現(xiàn),在實施導(dǎo)航掃雷前,利用一致目標(biāo)磁場信心,計算合適的參數(shù)值,適時對電磁掃雷具磁場進(jìn)行控制,從本章中數(shù)據(jù)指標(biāo)可以看出,該結(jié)構(gòu)實 現(xiàn)簡單,控制方便,應(yīng)用前景廣。
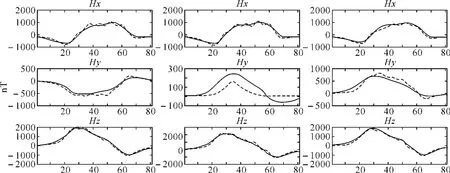
圖4 改善后的目標(biāo)磁場擬合曲線
[1]林春生.水雷磁引信設(shè)計原理[M].武漢:海軍工程大學(xué),2003:74~97
[2]林春生,龔沈光.艦船物理場[M].北京:兵器工業(yè)出版社,2007
[3]傅金祝,譯.目標(biāo)設(shè)定式掃雷系統(tǒng)[J].水雷戰(zhàn)與艦船防護(hù),2004(2):9~13
[4]傅金祝.國外非接觸掃雷具的發(fā)展概況與趨勢分析[J].水雷戰(zhàn)與艦船防護(hù),2001(2):15~20
[5]夏立新.國外反水雷艦艇和裝備最新發(fā)展綜述[J].水雷戰(zhàn)與艦船防護(hù),2000(3):45~49
[6]傅金祝.掃雷技術(shù)發(fā)展動向[J].水雷戰(zhàn)與艦船防護(hù),2005(2):46~53
[7]邊新迎.新型電磁掃雷具仿真驗?zāi)<翱刂扑惴ㄑ芯浚跠].海軍工程大學(xué),2004
[8]Fogel L J,Owens A J,Walsh M J.Artificial Intelligence through Simulated Evolution[M].New York:Wiley,1996
[9]雷英杰,張善文,等.MATLAB遺傳算法與工具箱應(yīng)用[M].西安:西安電子科技大學(xué)出版社,2005:45~49
[10]吳平健,李智勇.目標(biāo)分配的遺傳算法改進(jìn)研究[J].計算機與數(shù)字工程,2009,37(9)
[11]王勇.遺傳算法在人員征集選擇的仿真應(yīng)用研究[J].計算機與數(shù)字工程,2010,38(1)
[12]王小平.遺傳算法理論、應(yīng)用與軟件實現(xiàn)[M].西安:西安交通大學(xué)出版社,2002:104~122
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
