羅蘭C系統非時基交叉圓定位方法研究*
2011-06-06 10:05:30劉敬虎朱銀兵
艦船電子工程 2011年10期
關鍵詞:信號
劉敬虎 朱銀兵 李 豹
(91576部隊1) 寧波 315021)(海軍工程大學電氣與信息工程學院2) 武漢 430033)
1 引言
羅蘭C系統通常采用雙曲線測時差法定位,即在某一位置接收同一羅蘭C臺鏈的主臺和兩個副臺信號,測量接收到的兩個副臺相對主臺的時差,利用雙曲線定位原理解算船位。該方法采用單臺鏈定位,定位精度受臺站布設方式的限制,最佳定位區位于正基線一側扇形區域。為了實現羅蘭C信號覆蓋區的有效定位,增加臺站布設靈活性,發揮羅蘭C臺鏈的定位潛力,丁佳波對單臺鏈定位的奇異現象進行了分析,提出了利用高斯等角球面改正算法計算船位[1],分析了臺址位移對雙曲線大地坐標的影響及羅蘭C負區定位的計算方法[2];此外,一些學者利用緯度歸化處理方法[3]對羅蘭C信號的多臺鏈定位進行了深入研究[4~9],并對羅蘭C的非時基圓圓定位算法進行了初步分析[10]。其中非時基圓圓定位算法能夠解決單臺鏈雙曲線定位中基線延長線附近出現奇異現象這一問題,有效提高定位精度。因此,本文將詳細推導羅蘭C系統的非時基交叉圓定位方法,并結合試驗與單臺鏈雙曲線定位算法進行對比,分析算法的定位精度。
2 羅蘭C系統交叉圓定位原理
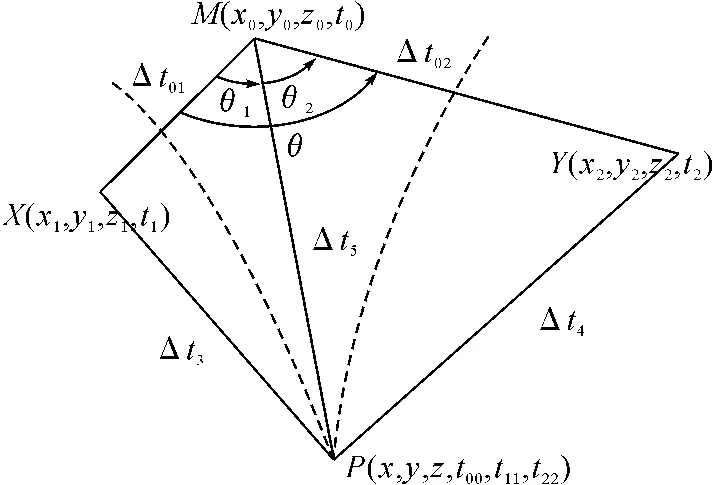
圖1 交叉圓定位示意圖
在直角坐標系中,地球表面任意一點可用三維坐標(x,y,z)表示,如果能夠求解出船位相對主臺與兩個副臺的球面半徑Rm、Rs1與Rs2,則由以主臺與兩個副臺為球面中心,分別以Rm、Rs1與Rs2為半徑的球面和大地球面相交即可求解出船位,交叉圓定位正是利用該原理實現船位解算的[6]。
如圖1所示,假設主臺M與副臺X、Y的直角坐標分別為(x0,y0,z0)、(x1,y1,z1)與(x2,y2,z2),船位為P(x,y,z)。則有:
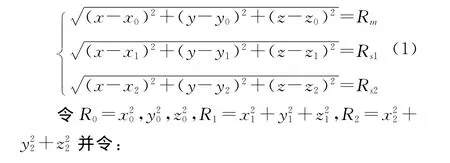
則方程(1)可簡化為:

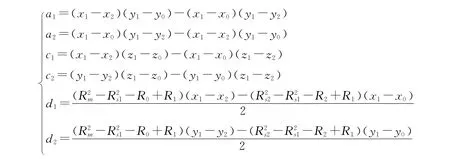
聯立方程(1)、(2)可得:

其中,

由此可得:

由于南半球沒有布設羅蘭C臺鏈,因此z必須滿足條件z≥0,故可以剔除其中不滿足條件的解,至此完成概位解算。如果得到的概位有多個,需要根據實際情況選擇最為可能的概位,然后由此概位利用時差與船位的函數關系進行牛頓迭代運算以得到精確船位。
3 羅蘭C系統交叉圓定位方法推導
由上述定位原理推導可知,船位相對主臺與兩個副臺的球面半徑Rm、Rs1與Rs2的求解是實現羅蘭C系統交叉圓定位的關鍵所在。以往認為,要精確求解船位相對主副臺的時間差Δt,就要求接收機與發射臺在時間上嚴格同步,但在工程實現中時間對準難度大,而且成本昂貴。為此,本文將在現有羅蘭C基礎上,詳細推導船位相對主臺與兩個副臺球面半徑Rm、Rs1與Rs2的計算方法,以實現羅蘭C系統的交叉圓定位。
如圖1所示,以t0表示主臺M發送導航信息時刻,t1表示副臺X收到主臺信號時刻,t2表示副臺Y收到主臺信號時刻,t22表示船位P收到主臺信號時刻,t00表示船位P收到由主臺信號發射到副臺X然后經過轉發的信號時刻,t11表示船位P收到由主臺信號發射到副臺Y然后經過轉發的信號時刻,Δt01表示主臺信號到達副臺X所消耗的時間,Δt02表示主臺信號到達副臺Y所消耗的時間,單位均為μs。由于Δt01、Δt02及θ角可以事先精確測量得到,t00、t11、t22可以由羅蘭 C接收機即時精確測量,c為電波傳播速度,則根據球面三角形關系有如下方程組:
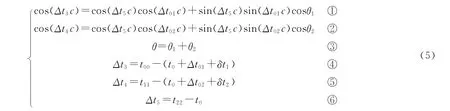
方程組(5)中,Δt01c、Δt02c、Δt3c、Δt4c及Δt5c均以弧度表示;δt1、δt2分別表示副臺X、Y的發射延遲,可事先測量。因此,式(5)中有θ1、θ2、t0、Δt3、Δt4、Δt5等6個未知數,通過求解Δt3、Δt4、Δt5即可確定三個圓的半徑,即可實現船位的確定。

展開式(6)有
同理,式(5)中①×sinΔφ2cosθ2-②×sinΔφ1 cosθ1有

展開式(8)有
聯立式(7)與式(9)可得:

由于B2C1-B1C2=Asin(φ4-φ3),方程(10)
可進一步簡化為

對方程(11)進行求解,當A=0時有

當A≠0時有

由于
式(13)可簡化為
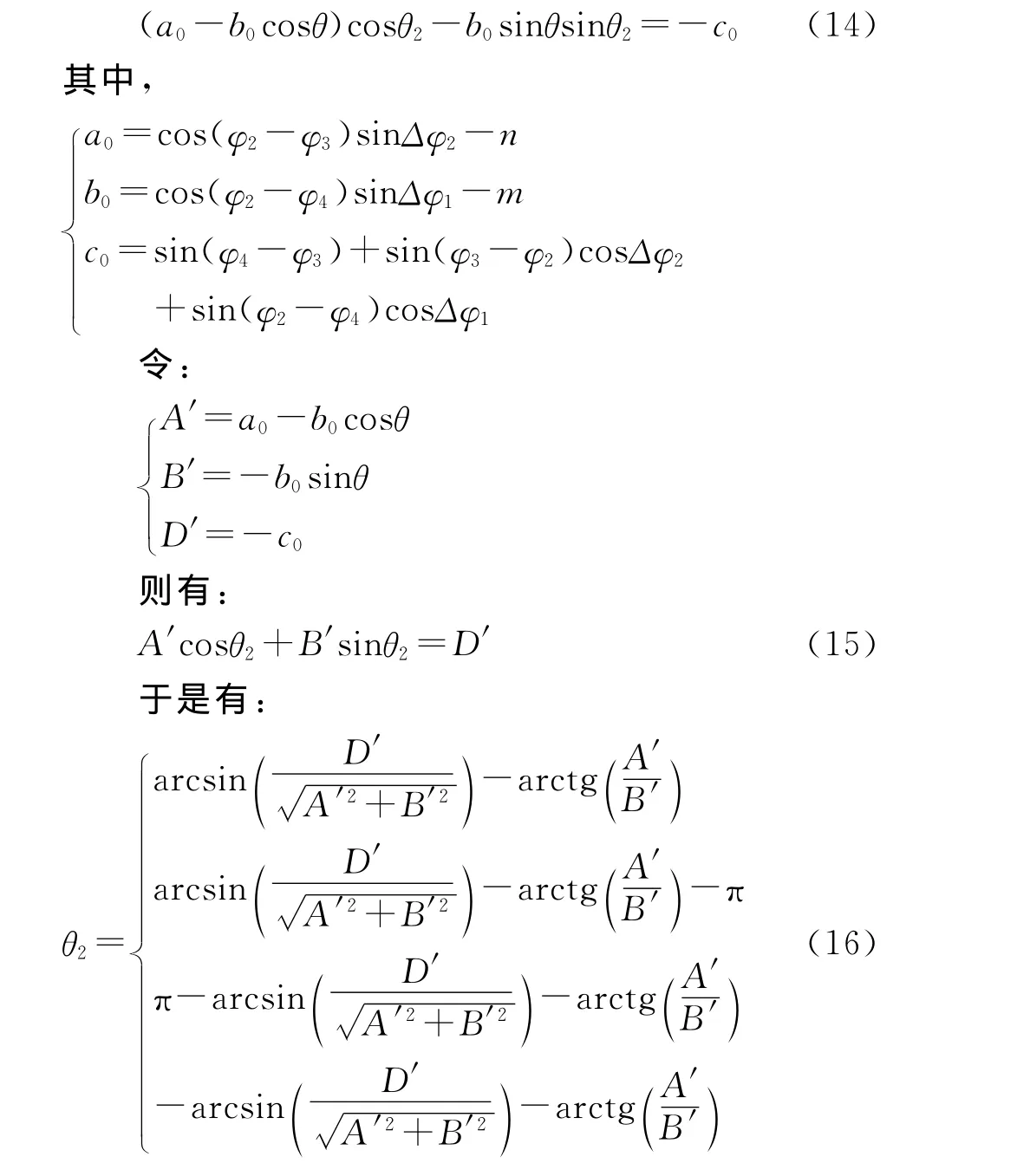
由式(12)、式(16)可知,方程組(5)的解最多有6個,但實際中滿足條件的只有一個。因此,需要考慮解的實際意義:θ2為實根,且0≤θ2≤π剔除不滿足條件的解。對于滿足條件的解,可根據式(7)解出主臺發射時刻t0,t0必須滿足以下條件:1)t0≥0;2)t22-t0≥0,由此可進一步剔除不滿足條件的解,得到主副臺信號到船位的傳播時間Δt3、Δt4、Δt5,從而求解出船位相對主臺與兩個副臺球面半徑Rm、Rs1與Rs2。
4 牛頓迭代求解
假設利用上述定位原理與推導過程得到的概位為(φc,λc),為了求解精確船位(φ,λ),采用牛頓迭代算法處理。假設船位與副臺2基線的夾角為θ,則θ及時差ξ可視為未知船位(φ,λ)的二元連續函數,于是有


對式(17)兩邊求導可得

由于θ,θc,ξ,ξc都是已知的,只要求出四個偏導數在概位的取值,就可以求出誤差Δφ和Δλ的近似值。假設A1、A2是輔助球面上概位到岸臺的方位角,則有:
迭代計算過程如下:首先以新的概位替換原來概位,即:φc+Δφ?φc,λc+Δλ?λc;然后重新計算式(18)~式(20),得到新的φc、λc及新的方程組,直到|Δφ|<ε且|Δλ|<ε。其中,ε為預先給定的收斂門限ε=10-7rad。
5 算法性能分析
為了分析交叉圓定位算法的精度,筆者多次利用XN-800接收機及海格通信公司樣機接收實際羅蘭C信號,并利用NI公司采集卡PXI-5922采集接收機射頻端信號,然后對信號進行處理與定位解算,并與接收機時差測量及定位結果進行比較。相關信號采集試驗現場如圖2所示。
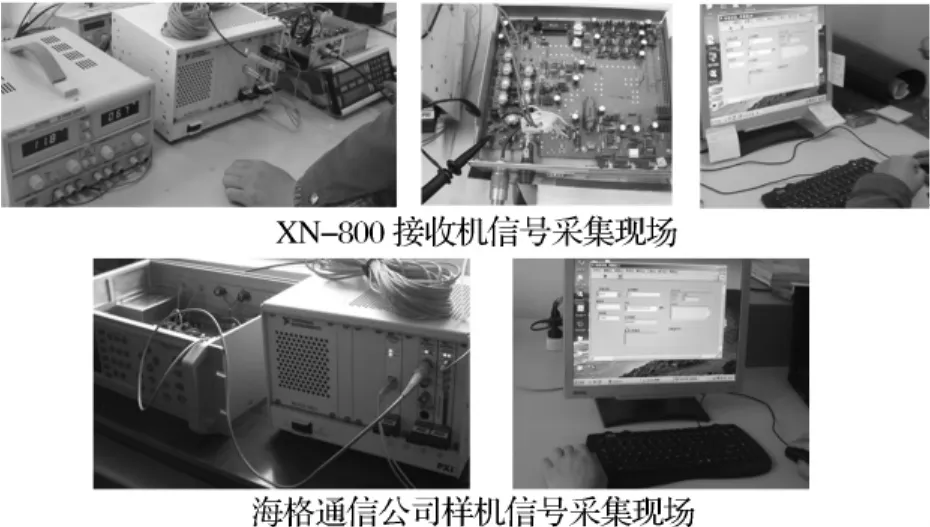
圖2 試驗現場
由于定位算法中的部分參數設定與附加二次相位因子ASF修正模型目前不完全統一,同一時差在不同算法下的定位結果不完全相同。因此,本文在分析定位精度時不考慮ASF的影響,主要參考指標為時差測量結果,并以GPS定位結果為參照,與單臺鏈雙曲線定位算法進行對比分析。測量點 GPS定位結果為 N30°34′55″,E114°14′23.88″,多次試驗結果表明測量點8390臺鏈實際測量時差為TD1=14988.5μs,TD2=33427μs;6780臺鏈實際測量時差為 TD1=14565μs,TD2=28120μs,采用上述非時基交叉圓定位及單臺鏈雙曲線定位算法得到的試驗結果如表1所示。
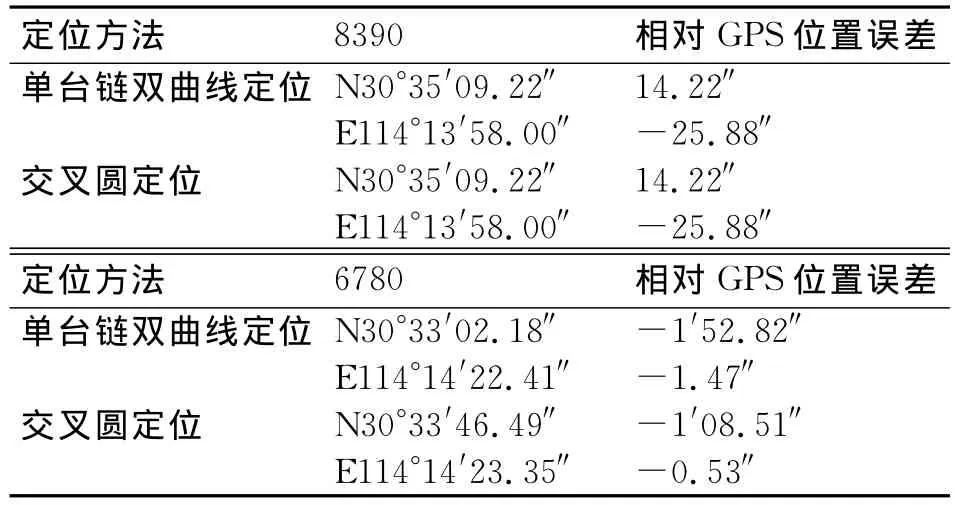
表1 交叉圓定位試驗對比結果
由表1可見,由于測量點相對于8390臺鏈的幾何因子GDOP較好,采用單臺鏈雙曲線定位與交叉圓定位方法得到的定位結果一致;而對于6780臺鏈,由于GDOP相對較差,采用交叉圓定位方法得到的定位結果優于采用單臺鏈雙曲線定位算法得到的結果。即在幾何因子GDOP不斷變差的過程中,交叉圓定位方法的定位結果優于單臺鏈雙曲線定位算法的結果。因此,在基線延長線附近,交叉圓定位方法的定位結果也必然由優于單臺鏈雙曲線定位算法的定位結果。
由此可見,采用交叉圓定位方法的定位結果不劣于單臺鏈雙曲線定位算法的定位結果,而且,采用交叉圓定位方法能夠有效解決單臺鏈雙曲線定位算法在基線延長線附近定位時存在“奇異”現象這一問題,有效擴大羅蘭C系統的作用區域,提高系統定位精度。
6 結語
本文在分析羅蘭C系統非時基交叉圓定位原理基礎上,詳細推導了羅蘭C非時基交叉圓定位算法及其迭代算法,然后通過試驗的方法得到了測量點相對不同臺鏈的時差測量結果。根據該時差測量結果進行了單臺鏈雙曲線定位與非時基交叉圓定位算法比較。結果表明:在幾何因子GDOP較好的位置,交叉圓定位方法的定位結果與單臺鏈雙曲線定位算法的定位結果相差不大,但在GDOP較差的位置,交叉圓定位方法的定位結果明顯優于單臺鏈雙曲線定位算法的定位結果;采用交叉圓定位方法能夠有效解決單臺鏈雙曲線定位方法在基線延長線附近定位時存在“奇異”現象這一問題等主要結論。所述非時基交叉圓定位方法對擴展羅蘭C系統有效覆蓋區域,提高羅蘭C系統定位精度具有一定實際意義。
[1]丁佳波.羅蘭C系統導航定位計算中的奇異現象及分析研究[J].導航,1999,35(1):100~106
[2]丁佳波.臺址位移對雙曲線大地坐標的影響及羅蘭C負區計算[J].導航,1994,30(2):96~102
[3]G.W.A.Ofermans,D.van Willigen,A.W.S.Helwig,et al.An European navigation solution[C]//Proc.of the 29th Annual Technical Symposium of the International Loran Association,Paris,November,2000:649~661
[4]秦衛華,楊致友.多臺鏈羅蘭C信號搜索方法研究[J].導航,1996,32(2):53~58
[5]丁佳波.關于不同臺鏈組合雙曲線導航系統的定位計算[J].導航,1994,30(4):70~77
[6]袁小利,高銳.羅蘭C多臺鏈定位解算技術及其應用[J].導航,2002,38(1):96~100
[7]閔思鶴,王甲池,江太輝,等.基于雙臺鏈羅蘭C導航儀的雙曲線導航定位算法[J].電子與信息學報,2003,25(5):700~703
[8]閔思鶴,王甲池,江太輝,等.基于雙臺鏈羅蘭C導航定位新算法[J].無線電通信技術,2002,28(4):10~12
[9]曹可勁,朱銀兵,張磊,等.羅蘭C雙臺鏈交叉定位算法研究[J].海軍工程大學學報,2011,23(3):1~4
[10]祝子明.對羅蘭C系統進行非時基圓定位方法的初步研究[J].導航,2006,42(4):103~107.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
