傳遞對(duì)準(zhǔn)數(shù)字仿真系統(tǒng)Kalman濾波池設(shè)計(jì)
2011-06-05 08:59:08解春明趙剡王紀(jì)南
哈爾濱工程大學(xué)學(xué)報(bào) 2011年10期
關(guān)鍵詞:符號(hào)
解春明,趙剡,王紀(jì)南,3
(1.北京航空航天大學(xué)儀器科學(xué)與光電工程學(xué)院,北京100191;2.桂林空軍學(xué)院,廣西 桂林541003;3.中國(guó)空導(dǎo)彈研究院,河南洛陽(yáng)471009)
傳遞對(duì)準(zhǔn)是用于解決捷聯(lián)慣導(dǎo)系統(tǒng)空中動(dòng)基座條件下初始對(duì)準(zhǔn)問題的一項(xiàng)關(guān)鍵技術(shù).特別是由于戰(zhàn)術(shù)武器在現(xiàn)代局部戰(zhàn)爭(zhēng)中的作用日益突出,對(duì)捷聯(lián)慣導(dǎo)系統(tǒng)對(duì)準(zhǔn)的快速性和準(zhǔn)確性提出了更高的要求[1].
國(guó)內(nèi)外對(duì)此問題的大量研究集中在對(duì)準(zhǔn)匹配方案、濾波器的設(shè)計(jì)上.傳遞對(duì)準(zhǔn)可采用的對(duì)準(zhǔn)匹配方案很多,其中典型方案包括速度匹配、姿態(tài)匹配、速度+姿態(tài)匹配、位置匹配、速度+位置匹配、角速率匹配、速度+角速率、比力匹配等等,而且即使是同一種匹配方案,其狀態(tài)方程和量測(cè)方程也不盡相同[2-12].另外,對(duì)準(zhǔn)所采用濾波器的配置參數(shù)及算法也很多[13-15].因此,對(duì)準(zhǔn)匹配及濾波的研究?jī)?nèi)容十分繁雜.
現(xiàn)有研究往往僅對(duì)特定的傳遞對(duì)準(zhǔn)匹配方案、狀態(tài)方程、量測(cè)方程、濾波參數(shù)以及濾波算法考慮,進(jìn)而編制對(duì)應(yīng)的程序.值得注意的是,當(dāng)匹配方案、狀態(tài)方程、量測(cè)方程、濾波參數(shù)以及濾波算法的任何部分發(fā)生變化時(shí),都需首先做代碼級(jí)修改,包括增刪變量、修改賦值、模型修改、算法修改、輸入輸出修改等,然后再進(jìn)行調(diào)試、發(fā)行,既浪費(fèi)了開發(fā)時(shí)間,又不利于系統(tǒng)集成.
本文旨在為傳遞對(duì)準(zhǔn)數(shù)字仿真系統(tǒng)設(shè)計(jì)通用的濾波機(jī)制,使仿真系統(tǒng)能夠靈活方便地進(jìn)行任意匹配方案、狀態(tài)方程、量測(cè)方程、濾波參數(shù)、濾波算法的研究.由于傳遞對(duì)準(zhǔn)通常采用Kalman濾波,因此本文設(shè)計(jì)的通用濾波機(jī)制稱為Kalman濾波池.Kalman濾波池基于VC++6.0開發(fā)環(huán)境,結(jié)合數(shù)據(jù)庫(kù)技術(shù)、動(dòng)態(tài)鏈接庫(kù)技術(shù)實(shí)現(xiàn).用戶可以擺脫代碼編寫的束縛,直接通過濾波池操作面板,進(jìn)行傳遞對(duì)準(zhǔn)匹配方案、濾波參數(shù)、矩陣等信息的填寫、保存,使得現(xiàn)有文獻(xiàn)提出的某種對(duì)準(zhǔn)匹配模型壓縮為濾波池的一條記錄.濾波池根據(jù)用戶需求提取記錄信息,啟動(dòng)濾波過程,解析數(shù)據(jù),調(diào)用導(dǎo)航、濾波算法,輸出濾波結(jié)果.
1 傳遞對(duì)準(zhǔn)Kalman濾波池設(shè)計(jì)
傳遞對(duì)準(zhǔn)線性離散方程表示為[16]

式中:Xk∈Rn為系統(tǒng)狀態(tài)向量,Φk,k-1∈Rn×n為狀態(tài)轉(zhuǎn)移矩陣,Zk∈Rm為系統(tǒng)量測(cè)向量,Γk,k-1∈Rn×r為噪聲驅(qū)動(dòng)陣,wk∈Rr為系統(tǒng)噪聲向量,Hk∈Rm×n為量測(cè)矩陣,vk∈Rm為量測(cè)噪聲向量.
系統(tǒng)噪聲和量測(cè)噪聲符合:

式中:Qk∈Rr×r為系統(tǒng)噪聲陣,Rk∈Rm×m為觀測(cè)噪聲陣,δkj為 Kronecker-δ函數(shù).
傳遞對(duì)準(zhǔn)采用標(biāo)準(zhǔn)卡爾曼濾波方程[16]:
1.1 濾波池符號(hào)集構(gòu)建
依據(jù)各種慣導(dǎo)誤差方程,傳感器誤差方程、機(jī)翼模型、量測(cè)匹配方案,考慮空中、海上或是陸基對(duì)準(zhǔn)情況,式(1)可以寫成許多具體形式,即 Xk、Zk、wk、vk、Φk,k-1、Γk-1、Hk對(duì)應(yīng)許多具體形式.
以符號(hào)來表示以上矢量和矩陣,則它們所有具體形式的并集為一個(gè)固定的符號(hào)集,而每種對(duì)準(zhǔn)匹配方案即為從此符號(hào)集抽取的一個(gè)特定子集.根據(jù)符號(hào)類型不同,分成如下幾類:
1)濾波狀態(tài)符號(hào)說明.
包括:x、y、z向速度差,x、y、z向失準(zhǔn)角,x、y、z向量測(cè)失準(zhǔn)角,經(jīng)度差、緯度差、高度差,x、y、z向角速率差,x、y、z向比力差,陀螺 向常值漂移,陀螺x、y、z向一階馬氏漂移,陀螺 x、y、z向刻度系數(shù)差,加計(jì) 向常值偏置,加計(jì)x、y、z向一階馬氏偏置,加計(jì)x、y、z向刻度系數(shù)差,x、y、z向機(jī)翼變形角,向機(jī)翼變形角速度.
2)濾波噪聲符號(hào)說明.
包括:陀螺 x、y、z向常值漂移噪聲,陀螺 x、y、z向一階馬氏漂移噪聲,陀螺x、y、z向刻度系數(shù)噪聲,加計(jì) x、y、z向常值偏置噪聲,加計(jì) x、y、z向一階馬氏偏置噪聲,加計(jì)x、y、z向刻度系數(shù)噪聲,向機(jī)翼變形角噪聲x、y、z向機(jī)翼變形角速度噪聲.
3)濾波觀測(cè)符號(hào)說明.
包括:x、y、z向速度,x、y、z向位置、經(jīng)度、緯度、高度,俯仰角、橫滾角、航向角,x、y、z向角速率,x、y、z向比力.
4)濾波矩陣元素符號(hào)說明.
矩陣 Φk,k-1、Γk-1、Hk由許多元素組成,其中每個(gè)元素為常數(shù)或多個(gè)符號(hào)運(yùn)算的表達(dá)式.構(gòu)成矩陣元素的符號(hào)分為如下幾類:
①基本數(shù)學(xué)符號(hào)
包括:數(shù)字0~9、小數(shù)點(diǎn)、負(fù)號(hào)、四則運(yùn)算符、冪運(yùn)算符、左右括號(hào).
②常用函數(shù)符號(hào)

③常量符號(hào)
橢球度e、基準(zhǔn)重力加速度g0、圓周率PI、地球自轉(zhuǎn)角速率、克拉索夫斯基規(guī)定地球橢球長(zhǎng)半軸長(zhǎng)Re.
④常用變量符號(hào)
變量符號(hào)包括:經(jīng)度、緯度、高度,x、y、z向速度,俯仰、橫滾、航向角,游移角,重力加速度,地球子午、卯酉圈主半徑,火控 x、y、z向位置、速度,x、y、z向桿臂長(zhǎng)度,x、y、z向機(jī)翼結(jié)構(gòu)撓曲變形系數(shù),導(dǎo)航系、載體系下x、y、z向角速率,導(dǎo)航系、載體系下x、y、z向比力,坐標(biāo)變換矩陣,傳感器相關(guān)時(shí)間等.
以上符號(hào)的名稱、含義和初始值由數(shù)據(jù)庫(kù)管理,可根據(jù)需要進(jìn)行增刪.
1.2 濾波池輸入面板設(shè)計(jì)
具備了式(1)的各矢量及矩陣,再給出濾波式(2)的初始條件 X0、P0、Q0、R0,就可以啟動(dòng)實(shí)施對(duì)準(zhǔn)濾波.因此,這里設(shè)計(jì)了濾波池輸入面板,用于Xk、Zk、wk、vk、Φk,k-1、Γk-1、Hk、X0、P0、Q0、R0的輸入、修改、保存、導(dǎo)入等操作.面板如圖1所示.
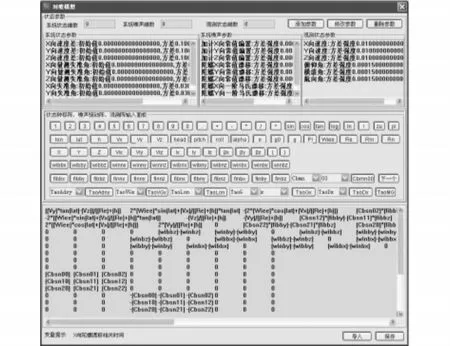
圖1 濾波池輸入面板Fig.1 Input panel of filtering pool
首先,輸入系統(tǒng)狀態(tài)維數(shù)、噪聲維數(shù)、觀測(cè)狀態(tài)維數(shù);然后根據(jù)矢量維數(shù)來給出 Xk、Zk、wk、vk、X0、P0、Q0、R0逐項(xiàng)添加其參數(shù),包括初始值、方差等,如圖2所示.

圖2 濾波初始參數(shù)配置面板Fig.2 Initial filter parameter configuration panel
接著,依次利用矩陣輸入面板給出 Φk,k-1、Γk-1、Hk的各元素.為了方便用戶使用,設(shè)計(jì)了鼠標(biāo)滑到某個(gè)符號(hào)上時(shí)給出提示的功能,如圖1中下部分所示.
最后,將濾波匹配模型保存入數(shù)據(jù)庫(kù),例如,可命名“九維狀態(tài)九維噪聲速度+姿態(tài)對(duì)準(zhǔn)匹配模型”濾波匹配模型庫(kù),當(dāng)名稱與數(shù)據(jù)庫(kù)某一名稱相同時(shí),可選擇是否覆蓋之.另外,可用面板導(dǎo)入某一模型進(jìn)行修改.
1.3 濾波池模型庫(kù)設(shè)計(jì)
濾波池模型庫(kù)用于保存2.2面板輸入的濾波匹配模型,采用SQL Server2000數(shù)據(jù)庫(kù)設(shè)計(jì),模型庫(kù)構(gòu)成如表1所示.

表1 濾波池模型庫(kù)Table 1 Model database of filtering pool
1.4 濾波池算法庫(kù)設(shè)計(jì)
濾波池采用的濾波基本算法如式(2),但在實(shí)際中式(2)的前提很難滿足,有時(shí)需要增大系統(tǒng)噪聲來近似處理.進(jìn)一步的研究是設(shè)計(jì)更多的自適應(yīng)濾波算法來擴(kuò)展系統(tǒng)濾波功能.
常用的算法有Sage-Husa自適應(yīng)濾波及其簡(jiǎn)化算法[14],在式(2)中加入:

式中:

還可采用強(qiáng)跟蹤自適應(yīng)濾波算法[15],即對(duì)狀態(tài)方差陣Pk進(jìn)行處理:

其中,sk+1=diag(s1(k+1),s2(k+1),…,sn(k+1))為狀態(tài)方差預(yù)測(cè)陣的對(duì)角權(quán)重陣,由如下公式計(jì)算:

其中:Tr()為矩陣跡運(yùn)算符,0≤ρ≤1為調(diào)節(jié)因子.
實(shí)際中,還有許多新近提出的自適應(yīng)濾波算法.這里,采用動(dòng)態(tài)鏈接庫(kù)進(jìn)行算法的編寫,使得算法與濾波過程獨(dú)立,且便于擴(kuò)充.另外,濾波仿真前,需要模擬導(dǎo)航解算,其中也包含許多算法,也采用動(dòng)態(tài)鏈接庫(kù)設(shè)計(jì).
1)算法動(dòng)態(tài)鏈接庫(kù)
算法動(dòng)態(tài)鏈接庫(kù)由頭文件、實(shí)現(xiàn)文件和定義文件組成.
①頭文件
用于給出導(dǎo)出函數(shù)命名,形式如下:

③定義文件
用于給出函數(shù)的導(dǎo)出列表,形式如下:
“LIBRARY(Navigation、Filter)
EXPORTS
(導(dǎo)航、濾波)函數(shù)1
(導(dǎo)航、濾波)函數(shù)2
……………………….
(導(dǎo)航、濾波)函數(shù) n”.
2)算法數(shù)據(jù)庫(kù)
算法數(shù)據(jù)庫(kù)用于保存算法對(duì)應(yīng)的函數(shù)信息,構(gòu)成如表2所示.

表2 算法數(shù)據(jù)庫(kù)Table 2 Algorithm database
1.5 濾波池功能類設(shè)計(jì)
1)文件讀取類CGetFileData.
能夠從數(shù)據(jù)文件中讀出指定行、指定列數(shù)據(jù),用于濾波計(jì)算和量測(cè)匹配等.
主要包括:函數(shù)StrToArray,用于將文件中一行數(shù)據(jù)按分割符拆分并存入字符串?dāng)?shù)組中;函數(shù)GetL-ineCount用于獲取文件按總行數(shù);函數(shù)GetColCount用于獲取文件總列數(shù);函數(shù)IsDataFile用于判斷文件是否為數(shù)據(jù)文件;函數(shù)GetFile用于從指定文件中提取一定行列數(shù)據(jù)到二維字符串?dāng)?shù)組中.
2)矩陣元素提取類CGetStrData能夠按照矩陣維數(shù)設(shè)定值將匹配模型中的矩陣字段按分割符拆分成單個(gè)矩陣元素.
主要包括:函數(shù)StrToArray,用于將矩陣字段值分成多行,將每行數(shù)據(jù)按分割符拆分并存入字符串?dāng)?shù)組中;函數(shù)GetStrData,利用字符串?dāng)?shù)組為對(duì)應(yīng)矩陣元素賦表達(dá)式類型值.
3)表達(dá)式計(jì)算類CExpCal根據(jù)當(dāng)前濾波時(shí)刻符號(hào)集中各符號(hào)數(shù)值對(duì)矩陣元素表達(dá)式進(jìn)行計(jì)算.
主要包括:符號(hào)值提取函數(shù)GetSignValue,用于根據(jù)濾波迭代和導(dǎo)航解算的更新結(jié)果提取符號(hào)集分量值;函數(shù)CalFun,用于計(jì)算符號(hào)函數(shù)值;函數(shù)GetUnit,用于將運(yùn)算單元保存到雙向鏈表;函數(shù)Get-Node,用于提取表達(dá)式樹狀結(jié)點(diǎn);函數(shù)GetNodeValue,用于計(jì)算節(jié)點(diǎn)值;函數(shù)AnalyzeExp,用于分析并表達(dá)式生成鏈表;函數(shù)CalExp,用于計(jì)算表達(dá)式值.1.6 濾波池執(zhí)行流程設(shè)計(jì)
設(shè)計(jì)如圖3所示的導(dǎo)航算法、對(duì)準(zhǔn)匹配模型、濾波算法設(shè)置面板,從數(shù)據(jù)庫(kù)中提取對(duì)應(yīng)的函數(shù)和模型數(shù)據(jù).

圖3 濾波執(zhí)行配置Fig.3 Executing configurtion of filtering
點(diǎn)擊“確定”,進(jìn)入如圖4所示的濾波池執(zhí)行流程.1)濾波仿真參數(shù)提取
濾波仿真參數(shù)包含子慣導(dǎo)開機(jī)時(shí)間、對(duì)準(zhǔn)開始時(shí)間、主、子陀螺和加計(jì)的采樣頻率、主、子慣導(dǎo)的姿態(tài)、速度、位置解算頻率、對(duì)準(zhǔn)濾波頻率.
2)慣導(dǎo)模擬導(dǎo)航
利用類CGetFileData提取主、子慣導(dǎo)導(dǎo)航參數(shù),利用導(dǎo)航算法庫(kù)首先對(duì)主慣導(dǎo)進(jìn)行導(dǎo)航解算,然后在主慣導(dǎo)開機(jī)時(shí)刻,利用主慣導(dǎo)數(shù)據(jù)對(duì)其進(jìn)行粗對(duì)準(zhǔn),進(jìn)行子慣導(dǎo)模擬導(dǎo)航.

圖4 濾波執(zhí)行流程Fig.4 Executing procedure of filtering
導(dǎo)航解算動(dòng)態(tài)鏈接庫(kù)的使用步驟為:
①按算法庫(kù)的函數(shù)參數(shù)定義導(dǎo)航算法函數(shù)
typedef void(_stdcall*NavFun)(參數(shù)列表).
②顯示導(dǎo)入動(dòng)態(tài)鏈接庫(kù)
HMODULE hModule=::LoadLibrary("Navigation.dll").
③根據(jù)定義文件的函數(shù)索引提取導(dǎo)航函數(shù)
NavFun Nav=(NavFun)GetProcAddress(hModule,函數(shù)索引).
3)濾波器配置.
從模型庫(kù)中提取濾波狀態(tài)、噪聲、觀測(cè)量的符號(hào)、初始值、方差值、矩陣信息,利用類CGetStrData為各矩陣元素分配表達(dá)式.
4)匹配濾波.
在對(duì)準(zhǔn)時(shí)間內(nèi),進(jìn)行主子慣導(dǎo)匹配濾波.
①更新符號(hào)集數(shù)值,
②利用類CExpCal計(jì)算矩陣元素表達(dá)式數(shù)值,
③考慮主子慣導(dǎo)周期、延遲進(jìn)行量測(cè)匹配,
④系統(tǒng)離散化,
⑤按照導(dǎo)航函數(shù)導(dǎo)入方法從濾波算法庫(kù)導(dǎo)入濾波函數(shù),執(zhí)行當(dāng)前濾波運(yùn)算,
⑥輸出當(dāng)前濾波結(jié)果,重復(fù)步驟①~⑥.
2 Kalman濾波池性能測(cè)試
為了驗(yàn)證Kalman濾波池的工作性能,進(jìn)行了6類30種對(duì)準(zhǔn)匹配方案的濾波仿真試驗(yàn),測(cè)試平臺(tái)如表3.

表3 測(cè)試平臺(tái)配置Table 3 Testing environment configuration
其中,6類對(duì)準(zhǔn)匹配方案包括[2-12]:速度匹配、速度+姿態(tài)匹配、速度+位置匹配、比力匹配、角速率匹配、速度+角速率匹配.每類匹配方案包括幾種具體的系統(tǒng)狀態(tài)維數(shù)、噪聲維數(shù)、濾波初始設(shè)置不同的對(duì)準(zhǔn)匹配方案,例如速度匹配方案測(cè)試了:六維狀態(tài)三維噪聲小、中、大狀態(tài)方差速度匹配方案、十二維狀態(tài)三維噪聲小、中、大狀態(tài)方差速度匹配方案、六維狀態(tài)六維噪聲小、中、大狀態(tài)方差速度匹配方案9種具體方案.實(shí)際中,狀態(tài)初始值、系統(tǒng)噪聲方差、量測(cè)噪聲方差也可根據(jù)用戶需要設(shè)置.仿真試驗(yàn)的條件為:初始經(jīng)度 116°,緯度 40°,高度 3 000 m,初始軌跡速度500 m/s,初始姿態(tài)角為0;假設(shè)主慣導(dǎo)無誤差;子慣導(dǎo)陀螺誤差參數(shù)εbsb量級(jí)為0.1°/h,εbsw量級(jí)為0.01°/h;加速度計(jì)誤差參數(shù)?bsb量級(jí)為10-3g,?bsw量級(jí)為10-4g;τg=τa=7 200 s;安裝誤差角 μbf各向均取為 1°;桿臂矢量為 LA=(5 m,-0.5 m,-1 m).
機(jī)翼?yè)锨冃尾捎?階馬爾科夫[7]過程模擬,三向結(jié)構(gòu)撓曲變形系數(shù)為 βx=4,βy=5,β=6,方差為 E[ηηT]=0.1δkj;機(jī)翼顫振變形幅度為 Ay=Az=0.001 m,顫振頻率為 fy=fz=40 Hz.
仿真時(shí)間20 s,濾波周期0.5 s,主子慣導(dǎo)姿態(tài)、速度、位置解算周期0.01 s.
通過記錄測(cè)試過程及結(jié)果信息,得具體參數(shù)如表4.

表4 傳遞對(duì)準(zhǔn)Kalman濾波池性能測(cè)試結(jié)果Table 4 Performance testing result of Kalman filtering pool
測(cè)試結(jié)果表明:傳遞對(duì)準(zhǔn)Kalman濾波池運(yùn)行穩(wěn)定、占用系統(tǒng)資源較小、存儲(chǔ)容量小、修改方便,且具有較高的計(jì)算精度和運(yùn)行速度.
3 結(jié)束語
本文設(shè)計(jì)了一種應(yīng)用于傳遞對(duì)準(zhǔn)數(shù)字仿真系統(tǒng)的通用Kalman濾波池,進(jìn)行匹配方案、濾波算法研究.濾波池采用VC++6.0平臺(tái)和SQL Server 2000數(shù)據(jù)庫(kù)系統(tǒng)開發(fā),通過符號(hào)集、操作面板、C++功能類、模型算法數(shù)據(jù)庫(kù)、算法動(dòng)態(tài)鏈接庫(kù)的設(shè)計(jì),使得用戶能夠靈活方便地進(jìn)行任意匹配方案、狀態(tài)方程、量測(cè)方程、濾波參數(shù)、濾波算法的研究.仿真測(cè)試驗(yàn)證了濾波池穩(wěn)定性、靈活性,表明其占用系統(tǒng)資源少、存儲(chǔ)容量小,具有較高的計(jì)算精度和運(yùn)行速度,有效提高了傳遞對(duì)準(zhǔn)匹配方案及濾波算法的研究效率,為機(jī)載導(dǎo)彈捷聯(lián)慣導(dǎo)系統(tǒng)設(shè)計(jì)和傳遞對(duì)準(zhǔn)的有效實(shí)施提供理論和技術(shù)參考.另外,此濾波池可以很容易地修改應(yīng)用于其他濾波領(lǐng)域.
[1]王司,鄧正隆.慣導(dǎo)系統(tǒng)動(dòng)基座傳遞對(duì)準(zhǔn)技術(shù)綜述[J].中國(guó)慣性技術(shù)學(xué)報(bào),2003,11(2):61-67.
WANG Si,DENG Zhenglong.Technique review of transfer alignmentfor inertial navigation systems on moving base[J].Journal of Chinese Inertial Technology,2003,11(2):61-67.
[2]KAIN J E,CLOUTIER J R.Rapid transfer alignment for tactical weapon applications[C]//Proceedings of the AIAA Guidance,Navigation and Control Conference. Boston:MA,1989:1290-1300.
[3]ROGERS R M.Velocity-plus-rate matching for improved tactical weapons rapid transfer alignment[C]//AIAA Guidance,Navigation and Control Conference.UNJ SA,1991:1580-1588.
[4]SHORTELLE K J,GRAHAM W R.F-16 flight test of a rapid transfer alignment procedure[C]//IEEE PLANS.Ft.Lauderdale:FL,1998:379-386.
[5]LYOU J,LIM Y C.Transfer alignment error compensator design based on robust state estimation[J].Transactions of the Japan Society for Aeronautical and Space Sciences,2005,48(61):143-151.
[6]LYOU J,LIM Y C.Transfer alignment considering measurement time delay and ship body flexure[J].Journal of Mechanical Science and Technology,2009,23(1):195-203.
[7]俞濟(jì)祥.慣性導(dǎo)航系統(tǒng)各種傳遞對(duì)準(zhǔn)方法討論[J].航空學(xué)報(bào),1988,9(5):211-217.
YU Jixiang.Discussion on several transfer alignment methods of inertial navigation system[J].Acta Aeronautica et Astronautica Sinica,1988,9(5):211-217.
[8]黃昆,單福林,楊功流,等.艦載角速度匹配傳遞對(duì)準(zhǔn)方法研究[J].中國(guó)慣性技術(shù)學(xué)報(bào),2005,13(4):1-5.HUANG Kun,SHAN Fulin,YANG Gongliu,et al.Angular rate matching method for shipboard transfer alignment[J].Journal of Chinese Inertial Technology,2005,13(4):1-5.
[9]盧松華,羅建軍,岳曉奎.速度+方位角匹配傳遞對(duì)準(zhǔn)算法的簡(jiǎn)化與仿真[J].彈箭與制導(dǎo)學(xué)報(bào),2005,25(3):292-295.
LU Songhua,LUO Jianjun,YUE Xiaokui.Simplification and simulation of velocity-plus-azimuth matching T/A[J].Journal of Projectiles,Rockets,Missiles and Guidance,2005,25(3):292-295.
[10]陳凱,魯浩,閆杰.傳遞對(duì)準(zhǔn)中一種新的姿態(tài)匹配算法[J].西北工業(yè)大學(xué)學(xué)報(bào),2007,25(5):691-694.
CHEN Kai,LU Hao,YAN Jie.A different and better algorithm for attitude match of transfer alignment[J].Journal of Northwestern Polytechnical University,2007,25(5):691-694.
[11]于飛,翟國(guó)富,李倩,等.速度加角速度匹配傳遞對(duì)準(zhǔn)方法研究[J].傳感器與微系統(tǒng),2009,28(6):69-72.
YU Fei,ZHAI Guofu,LI Qian,et al.Research on velocity plus angular rate match transfer alignment[J].Transducer and Microsystem Technologies,2009,28(6):69-72.
[12]李群生,董景新,魯浩.角速度匹配在機(jī)載武器傳遞對(duì)準(zhǔn)中的應(yīng)用[J].彈箭與制導(dǎo)學(xué)報(bào),2009,29(3):62-64.
LI Qunsheng,DONG Jingxin,LU Hao.The application of angular rate matching to transfer alignment for airborne weapons[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,29(3):62-64.
[13]SPALDING K.An efficient rapid transfer alignment filter[C]//Proc of the AIAA GN&C Conference.Montreal,Canada,1992:1276-1286.
[14]魯平,趙龍,陳哲.改進(jìn)的Sage-Husa自適應(yīng)濾波及其應(yīng)用[J].系統(tǒng)仿真學(xué)報(bào),2007,19(15):3503-3505.
LU Ping,ZHAO Long,CHEN Zhe.Improved Sage-Husa adaptive filtering and its application[J].Journal of System Simulation,2007,19(15):3503-3505.
[15]張?jiān)姽穑炝⑿拢w義正.粒子濾波算法研究進(jìn)展與展望[J].自動(dòng)化技術(shù)與應(yīng)用,2010,29(6):1-16.
ZHANG Shigui,ZHU Lixin,ZHAO Yizheng.The development and prospect of particle filtering algorithm[J].Automation Technology and Application,2010,29(6):1-16.
[15]付夢(mèng)印,鄧志紅,張繼偉.Kalman濾波理論及其在導(dǎo)航系統(tǒng)中的應(yīng)用[M].北京:科學(xué)出版社,2003:25-28.
FU Mengyin,DENG Zhihong,ZHANG Jiwei.Kalman filtering theory and its application in navigation system[M].Beijing:Science Press,2003:25-28.
猜你喜歡
ELLE世界時(shí)裝之苑(2024年5期)2024-05-14 16:00:39
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年10期)2021-11-22 07:53:00
幼兒園(2021年6期)2021-07-28 07:42:14
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2019年11期)2019-11-25 07:31:48
散文詩(shī)(2017年17期)2018-01-31 02:34:20
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年3期)2018-01-31 02:19:05
小學(xué)生導(dǎo)刊(2017年13期)2017-06-15 20:29:38
哈爾濱師范大學(xué)自然科學(xué)學(xué)報(bào)(2015年1期)2015-04-19 06:55:26
天津科技大學(xué)學(xué)報(bào)(2015年4期)2015-04-16 04:55:11
科普童話·百科探秘(2014年5期)2015-03-09 09:07:41