平視顯示器視差自動測量系統(tǒng)的設(shè)計與實現(xiàn)
2011-06-05 09:14:44李建超張維光王戰(zhàn)勝李岳峰
電光與控制 2011年8期
李建超,高 明,張維光,王戰(zhàn)勝,李岳峰
(1.西安工業(yè)大學(xué)光電學(xué)院,西安 710032;2.中國航空工業(yè)洛陽電光設(shè)備研究所,河南 洛陽 471009)
0 引言
平視顯示器是綜合航電火控系統(tǒng)的重要組成部分[1-2],通常安裝在座艙中央儀表板的上方,是飛機的主顯示器,是飛行員和飛機之間交換信息的主要窗口。若光學(xué)組件的圖像源平面偏離焦平面就會產(chǎn)生視差,駕駛員由于雙目同時觀察這種帶有視差的光點,視覺極易疲勞,并且其頭部處于不同位置將會瞄向不同方向,從而帶來瞄準誤差。因此,必須消除平視顯示器視差。傳統(tǒng)的視差測量方法主要有:視度測量法[3-5]、擺頭法[6]、示數(shù)觀測鏡法[6]。視度測量法直接用視度筒測量物像和分劃像的視度差值,這種方法精度較低,不能得到廣泛應(yīng)用;擺頭法主觀因素太大,不同檢測者能得出不同的結(jié)果,并且不易給出定量結(jié)果,故不適用于平視顯示器視差的最終測試;示數(shù)觀測鏡是實用簡便的平視顯示器視差調(diào)校設(shè)備,但對視差的檢測是不定量的,而目前對存在視差的平視顯示器主要調(diào)校方法[7],是通過加減不同厚度的墊片改變像源與系統(tǒng)透鏡間距進行調(diào)整系統(tǒng)視差的,檢測出準確的視差值對平顯的光學(xué)性能至關(guān)重要。目前大多研究者都只進行了理論研究[8-9],還沒有采用光電測量法對視差進行客觀測量的、高精度的自動視差測量裝置。
研制了一套基于光電法的新型視差自動測量裝置,裝置利用CCD光電轉(zhuǎn)換器件,采用光學(xué)系統(tǒng)自動調(diào)焦常用方法[10]中的數(shù)字圖像處理技術(shù),實現(xiàn)檢測的自動化和數(shù)字化。
1 計算原理
對于存在視差的系統(tǒng),分劃面與無限遠物(像)不重合,分劃板上的分劃刻線和物(像)再次成像后仍不重合,造成二者視度的差異[7]。因此視差可以用無限遠物(像)的視度ΔSD1和分劃板中心分劃的視度SD2之差ΔSD表示,即:

式中:b為分劃面到焦平面的距離;f'為系統(tǒng)的焦距。
設(shè)平視顯示器光學(xué)系統(tǒng)口徑為D,焦距為f',F(xiàn)、F'分別是光學(xué)系統(tǒng)的前焦點和后焦點,A、A'分別為物點和像點。當物面位于前焦面上時,出射光束與主光線平行,視差為零;當物面偏離前焦面位置時,出射光束會聚或發(fā)散,與主光線存在一定的偏角,此時視差不為零。見圖1。CRT分劃面或備用環(huán)分劃面A偏離前焦面F,偏離距離為b,稱為離焦量;Q'就是出射光束與主光線的偏差角,即為存在的視差量。
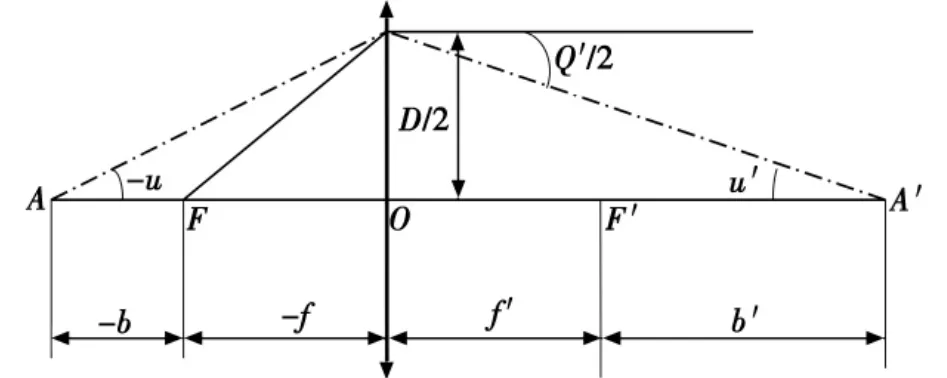
圖1 計算原理圖Fig.1 Schematic diagram of calculation
離焦量b與視差角Q'的關(guān)系式為

該光學(xué)系統(tǒng)屬于小孔徑長焦距系統(tǒng),其相應(yīng)角度的弧度可以用正弦值來代替,故可得出:

由于式(4)中離焦量b與系統(tǒng)焦距f'相比,是一個很微小的量,可以略去不計,所以取u=D/2f',并代入式(4)中,整理后可得:

式(7)是在CRT分劃面或備用環(huán)分劃面A位于焦平面之外的情況。同理,當圖像源分劃面A位于焦平面內(nèi)時,同樣可以推導(dǎo)出式(7)。在推導(dǎo)過程中,規(guī)定光線以銳角方向轉(zhuǎn)到光軸,視差角順時針為正,逆時針為負;而離焦量以焦點為中心,到物點的方向與光線方向相同為正,相反為負。當CRT分劃面或者備用環(huán)分劃面位于光學(xué)組件的前焦面之外,造成出射光線會聚,產(chǎn)生后視差,規(guī)定離焦量b為負值,計算出視差角Q'為負值;當CRT分劃面或者備用環(huán)分劃面位于光學(xué)組件的前焦面之內(nèi),造成出射光線發(fā)散,產(chǎn)生前視差,規(guī)定離焦量b為正值,計算出視差角Q'為正值。
2 系統(tǒng)描述
2.1 系統(tǒng)組成
本測試系統(tǒng)由目視光學(xué)系統(tǒng)、光電接收系統(tǒng)、方位調(diào)節(jié)機構(gòu)、自動對焦系統(tǒng)及視差測量軟件5部分組成。測量系統(tǒng)框圖如圖2所示。

圖2 平視顯示器視差自動測量系統(tǒng)框圖Fig.2 Diagram of HUD's parallax automatic measuring apparatus
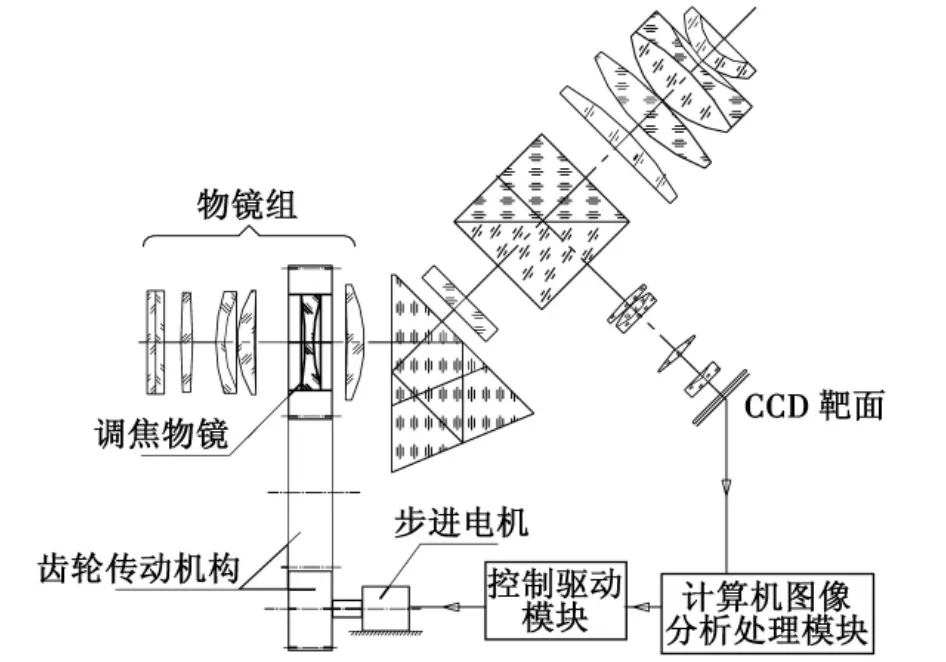
圖3 視差自動測量系統(tǒng)原理圖Fig.3 Automatic parallax measurement system
1)目視光學(xué)系統(tǒng)。
目視光學(xué)系統(tǒng)是典型的望遠系統(tǒng),由調(diào)焦物鏡和目鏡組成,分劃板位于物鏡像方焦平面上,可以在目鏡出瞳平面內(nèi)同時觀測到視差自動測量裝置和被測儀器的分劃刻線像。
2)光電接收系統(tǒng)。
光電接收系統(tǒng)由CCD接收物鏡、CCD及計算機組成。CCD接收物鏡接收分光棱鏡反射,CCD接收成像,送給計算機儲存和分析。本系統(tǒng)選用索尼公司的ARTCAM-500P型號的彩色面陣CCD相機,光學(xué)尺寸為2/3 in(1 in=25.4 mm),有效像素尺寸為 9.74 mm(H)×7.96 mm(V),像元尺寸為 3.4 μm(H)×3.4 μm(V)。
3)方位調(diào)節(jié)機構(gòu)。
方位調(diào)節(jié)機構(gòu)用以調(diào)整整臺儀器的方位,方便測量。包括俯仰、水平旋轉(zhuǎn)、水平移動、高度調(diào)節(jié)等功能,采用常見的蝸輪蝸桿機構(gòu)原理和螺旋傳動原理實現(xiàn)。
4)自動對焦系統(tǒng)。
自動對焦系統(tǒng)由兩個功能模塊構(gòu)成,一個分析處理模塊,一個控制驅(qū)動模塊。分析處理模塊是基于數(shù)字圖像處理的對焦深度法[11]來實現(xiàn)自動對焦,通過能量梯度函數(shù)對不同對焦位置所成的像的清晰度進行評價,由于能量梯度函數(shù)的單峰性,峰值兩側(cè)單調(diào)性以及無偏性,峰值對應(yīng)于清晰度最佳的成像位置。評價函數(shù)峰值搜索采用爬山法,實現(xiàn)尋找對焦最清晰點。
能量梯度函數(shù)[12]為

其中:f(x,y)為圖像在點(x,y)的灰度值。
控制驅(qū)動模塊由齒輪傳動機構(gòu)、步進電機及其驅(qū)動器組成。通過步進電機驅(qū)動機構(gòu)調(diào)節(jié)測量系統(tǒng)調(diào)焦物鏡的移動,改變系統(tǒng)焦距f',從而改變成像像距,當大視場平行光管十字分劃線通過分析處理模塊分析結(jié)果成像清晰時,步進電機脈沖數(shù)置零;放置被測平視顯示器,調(diào)節(jié)內(nèi)調(diào)焦物鏡,使得圖像源平面分劃成像清晰。
5)視差測量軟件。
滿足要求視差測量軟件運行于Windows XP操作系統(tǒng)下,使用的開發(fā)工具為Visual C++6.0,軟件操作主要由CCD相機參數(shù)設(shè)置、測試操作兩部分組成。在實際測量過程中,從大視場平行光管分劃清晰成像到被測平視顯示器使圖像源平面分劃成像清晰為止,記錄步進電機脈沖數(shù),與步距角的乘積即可得出平視顯示器的離焦量,計算視差值Q',軟件顯示的單位為“s”。
2.2 系統(tǒng)工作過程
將視差自動測量裝置置于大視場平行光管前,調(diào)整大視場平行光管和視差自動測量裝置高低、前后位置,使大視場平行光管中的中心十字分劃位于視差自動測量裝置視場中心;驅(qū)動自動對焦系統(tǒng),調(diào)節(jié)視差自動測量裝置內(nèi)調(diào)焦物鏡,使得分析處理模塊對大視場平行光管分劃像分析結(jié)果為:清晰。此時,視差測量軟件中步進電機脈沖數(shù)置零;再將被測平視顯示器置于視差自動測量裝置和大視場平行光管之間,驅(qū)動自動對焦系統(tǒng),使得分析處理模塊對大視場平行光管分劃像分析結(jié)果為:清晰;并記錄此次調(diào)焦步進電機發(fā)出的脈沖數(shù);步進電機脈沖數(shù)與步距角的乘積即為平視顯示器的離焦量,計算軟件通過式(7)給出視差值。
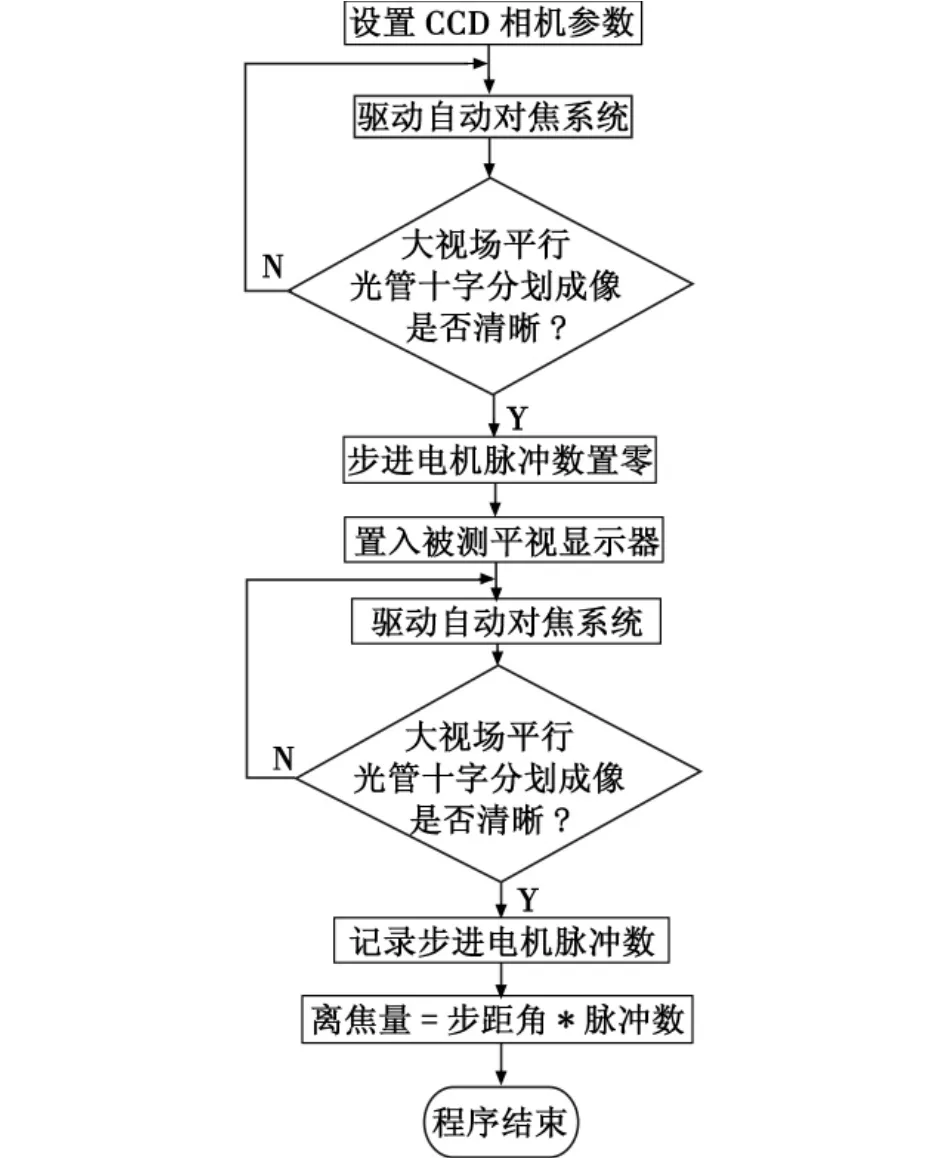
圖4 視差測量軟件流程圖Fig.4 The flow chart of parallax measurement
3 測量精度分析
采用本系統(tǒng)進行視差測量,產(chǎn)生誤差的誤差源主要有:步進電機的步長、被測瞄具定位誤差、自動調(diào)焦系統(tǒng)的分析處理模塊產(chǎn)生的誤差、平行光管光束平行性等因素。
1)步進電機的步長因素。
由于步進電機是以步長為單位驅(qū)動測量儀內(nèi)調(diào)焦物鏡的,故理論上存在大視場平行光管分劃像最清晰位置不在整數(shù)步長位置,最大誤差不大于一個步長,步長為0.01 mm,本裝置的誤差由式(7)計算得到為10.4″。
2)被測瞄具定位誤差因素。
被試品的定位誤差主要為大視場平行光管、平視顯示器與自動測試儀的光軸不重合的誤差對視差的影響,按一般實驗測試誤差取為3″。
3)自動調(diào)焦系統(tǒng)的分析處理模塊產(chǎn)生的誤差因素。
由于自動對焦系統(tǒng)的分析處理模塊是基于數(shù)字圖像處理的對焦深度法來實現(xiàn)自動對焦,焦深必然會對自動調(diào)焦精度帶來一定的影響。由焦深公式

算得Δl=0.009 mm,對應(yīng)視差值為1″。其中:λ為中心波長;n'為像方折射率;f'為CCD攝像系統(tǒng)的焦距;D為CCD攝像系統(tǒng)入瞳直徑。此系統(tǒng)中D=14 mm,f'=28 mm。
4)平行光管光束平行性產(chǎn)生誤差因素[13]。
綜合上述誤差分析,得到平行光管光束平行性產(chǎn)生誤差較小,可以忽略不計,系統(tǒng)誤差最大值為14.4″。完全滿足平視顯示器通用規(guī)范[6]要求。
4 測量系統(tǒng)的測試實驗
在實際測量過程中,根據(jù)現(xiàn)場的測量環(huán)境,設(shè)置相機的各相關(guān)參數(shù),依據(jù)被測平視顯示器的型號設(shè)置相應(yīng)的焦距和口徑。通過采用自動檢測系統(tǒng)和未采用自動對焦系統(tǒng)視差檢測儀及擺頭法3種方法,選用某型號的平視顯示器,分別對其12°中心視場和12°~24°視場進行了3次視差檢測,結(jié)果見表1。

表1 檢測結(jié)果Table 1 Test results
表1中:b1為未采用自動對焦系統(tǒng)視差檢測,當大視場平行光管分劃清晰成像時,調(diào)焦手輪讀數(shù);b2對物鏡進行調(diào)焦,當平視顯示器圖像源平面分劃像清晰時,調(diào)焦手輪讀數(shù);b=b2-b1;Q1'為自動測量系統(tǒng)測試結(jié)果;Q2'未采用自動對焦系統(tǒng)視差檢測儀測試結(jié)果。
視差是平視顯示器的一項重要光學(xué)性能指標,GJB189《平視顯示器通用規(guī)范》對于平視顯示器視差的規(guī)定是:當通過組合玻璃,在設(shè)計眼位垂直于基準軸線的62 mm的圓形平面內(nèi)觀察時,對任意眼點位置所產(chǎn)生的角度誤差,在12°中心視場內(nèi)應(yīng)不大于3.5',在12°~24°視場內(nèi)應(yīng)不大于 7.5'。
通過數(shù)據(jù)分析,與合格視差標準相比,擺頭法在誤差大于1'的情況下判斷較為準確,1'以內(nèi)容易判斷錯誤。實際測量說明,采用基于機器視覺的視差檢測系統(tǒng)進行視差測量,提高了檢測的準確度,同時由Q1'值可以看出自動測量系統(tǒng)的精度和可重復(fù)性較好,并且直接獲取離焦量,大大提高了產(chǎn)品調(diào)校的精度和效率。
5 結(jié)論
應(yīng)用自動對焦技術(shù),設(shè)計了一套視差自動檢測裝置,從理論和實踐上實現(xiàn)了平視顯示器視差自動檢測。該裝置克服了傳統(tǒng)視差檢測方法結(jié)果受主觀影響較大的缺陷,實現(xiàn)了視差的自動、定量檢測,提高了平顯調(diào)校的效率和精度。
[1]王立偉,汪健甄.國外軍用飛機平視顯示器的發(fā)展[J].紅外與激光工程,2007,36,(9):579-582.
[2]黃為,陳維榮,鄧雨.飛機平顯自動測試系統(tǒng)的研制與開發(fā)[J].計算機測量與控制,2005,13(3):205-207.
[3]蘇大圖,沈海龍.光學(xué)測量與像質(zhì)鑒定[M].北京:北京工業(yè)學(xué)院出版社,1987.
[4]劉秉琦,周斌.利用CCD實現(xiàn)望遠系統(tǒng)視差自動測試的研究[J].半導(dǎo)體光電,2005,26(3):253-255.
[5]曲衛(wèi)東.大口徑平行光管用于光軸平行度測量的實現(xiàn)[J].儀器儀表報,2006,27(6):13-17.
[6]李春亮.平視顯示器的視差調(diào)校研究[J].電光與控制,2002,9(2):54-57.
[7]楊勝杰,李曉霞,劉春華.頭盔顯示器視差調(diào)校的量化研究[J].電光與控制,2009,16(5):86-89.
[8]曹維國,朱運東.基于CCD的視度和視差測試系統(tǒng)研究[J].紅外與激光工程,2007,36(S):232-235.
[9]左曉舟,劉鈞,高明.望遠系統(tǒng)視差自動檢測技術(shù)研究[J].激光與光電子進程,2010,47(12):47-53.
[10]梁翠萍,李清安,喬彥峰,等.簡析光學(xué)系統(tǒng)自動調(diào)焦的方法[J].電光與控制,2006,13(6):93-96.
[11]鮑歌堂,趙輝,陶衛(wèi).圖像測量技術(shù)中幾種自動調(diào)焦算法的對比分析[J].上海交通大學(xué)學(xué)報,2005,39(1):121-124.
[12]任四剛,李見為,謝利利.基于灰度差分法的自動調(diào)焦技術(shù)[J].光電工程,2003,30(4):53-55.
[13]蘇大圖,沈海龍.光學(xué)測量與像質(zhì)鑒定[M].北京:北京理工大學(xué)出版社,2003:103-105.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
