一種新的二值化方法在車牌檢測中的應用
2011-06-01 02:54:18高云杰
電子科技 2011年12期
高云杰,孫 涵
(南京航空航天大學計算機科學與技術學院,江蘇南京 210016)
車牌識別是智能交通系統的關鍵技術,識別的準確率直接影響到智能交通系統在實際應用中的使用效果。車牌識別廣泛應用于停車收費、高速公路收費、違章檢測中,并對城市的交通管理起到了明顯的改善作用。車牌識別系統主要有以下3個部分:車牌定位、字符分割和字符識別,而車牌定位是基礎,關系到后續處理過程,所以車牌定位在車牌識別系統中至關重要。文中主要根據車牌區域邊界密集、區域標準差較高的特征,綜合該區域的亮度設定閾值進行二值化,最大程度地保留車牌區域,使其在不同光照條件下都能很好地凸顯車牌區域,并應用區域融合方法將邊界密集的區域融合,運用開運算的數學形態學方法去除圖像中的噪聲、粘連以及毛刺,最終篩選各連通域,從中找到有可能是車牌的區域,并據此從原圖中提取車牌。算法流程如圖1所示。
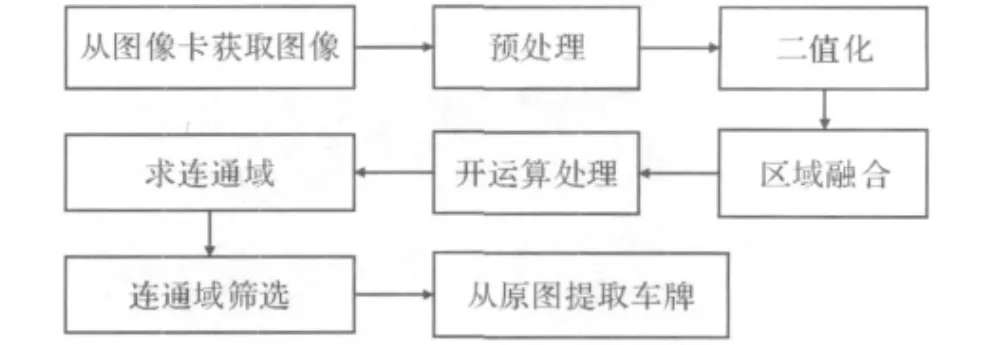
圖1 算法流程圖
1 預處理
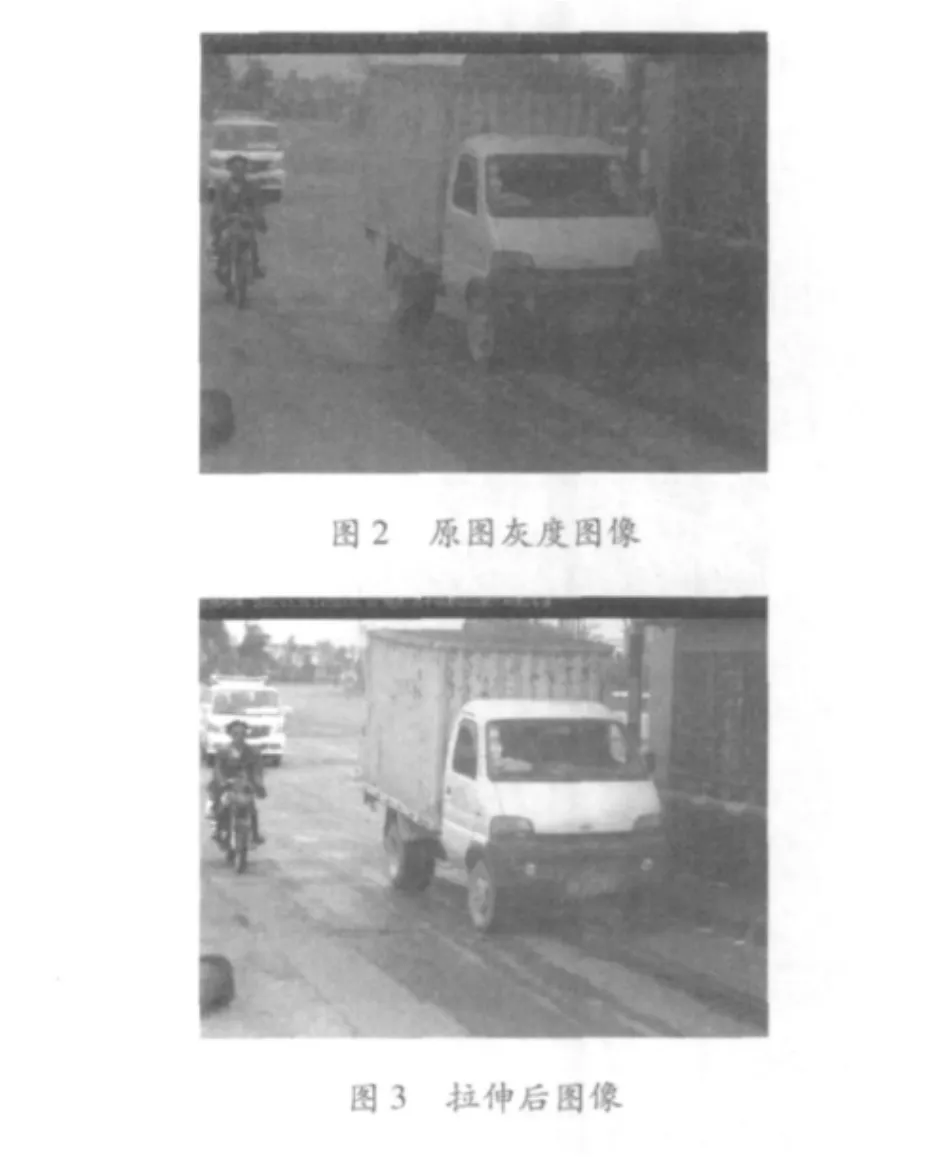
從圖像采集卡獲得的圖像數據通常是彩色的,預處理過程首先對其進行灰度化,再進行灰度拉伸。采用灰度圖像處理可以提高檢測效率,灰度拉伸可以提高車牌區域的對比度,提升檢測率。
由于車牌位于車身的下部中間,屬于中間灰度級范圍,而車頭上部及背景中一些區域一般較亮,屬于高灰度級范圍。為突出牌照的灰度細節,抑制高、低灰度區域,可利用式(1)對車牌圖像進行中間灰度拉伸[1]

假設灰度化后的灰度級范圍為Iij∈[a,b],灰度拉伸后的灰度級范圍拓展為Iij'∈[a',b'],灰度拉伸效果如圖3所示。
2 基于局部特征的二值化方法
由于全局二值化方法可能會造成某些較暗或者對比度低的車牌區域丟失,文中提出了一種新的局部二值化方法,這種二值化方法綜合了局部區域的亮度及標準差信息,最大程度地保留車牌區域,實驗證明這種二值化方法比普通的先做邊緣檢測再二值化的方法有明顯改進。
2.1 標準差在邊緣處理中的應用
考慮到標準差在圖像邊緣處的特征,文獻[5,8]提出并改進了一種基于區域標準差的圖像增強算法,用于增強車牌區域的邊界梯度值,有著明顯的效果,算法公式如式(2)和式(3)所示。
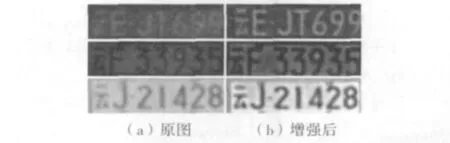
圖4 圖像增強比較

考慮到標準差在圖像邊界處的重要特征,文中提出了一種新的自適應二值化方法,這種方法將圖像的亮度、區域標準差等信息應用到二值化過程中,起到了明顯的作用。
2.2 基于標準差的局部二值化算法
傳統基于紋理的車牌檢測方法一般是直接對灰度圖像進行二值化[1,4],或先做邊緣檢測,再對邊緣圖像做二值化[9],這樣會丟失原圖的一部分信息,如亮度、區域標準差等信息,如果將這些信息運用到二值化過程中能很好地提升二值化的效果。


具體二值化方法如式(5)

采用此方法得到的二值化效果如圖5(a)所示。
可以看出,文算法明顯突出了邊界信息豐富的車牌區域,同時減弱了非車牌區域的邊界及噪聲影響。大津閾值算法[6]如圖5(b)雖然也將車牌區域的邊界信息保留,但同時也增強了非車牌區域邊界及噪聲的干擾。
3 車牌提取
采用數學形態學的方法提取車牌圖像,首先進行區域融合,將像素點密集的區域融合為一個整體,再經過開運算去除圖像中的噪聲、毛刺、及粘連等,最后查找連通域,篩選出符合車牌特征的部分。
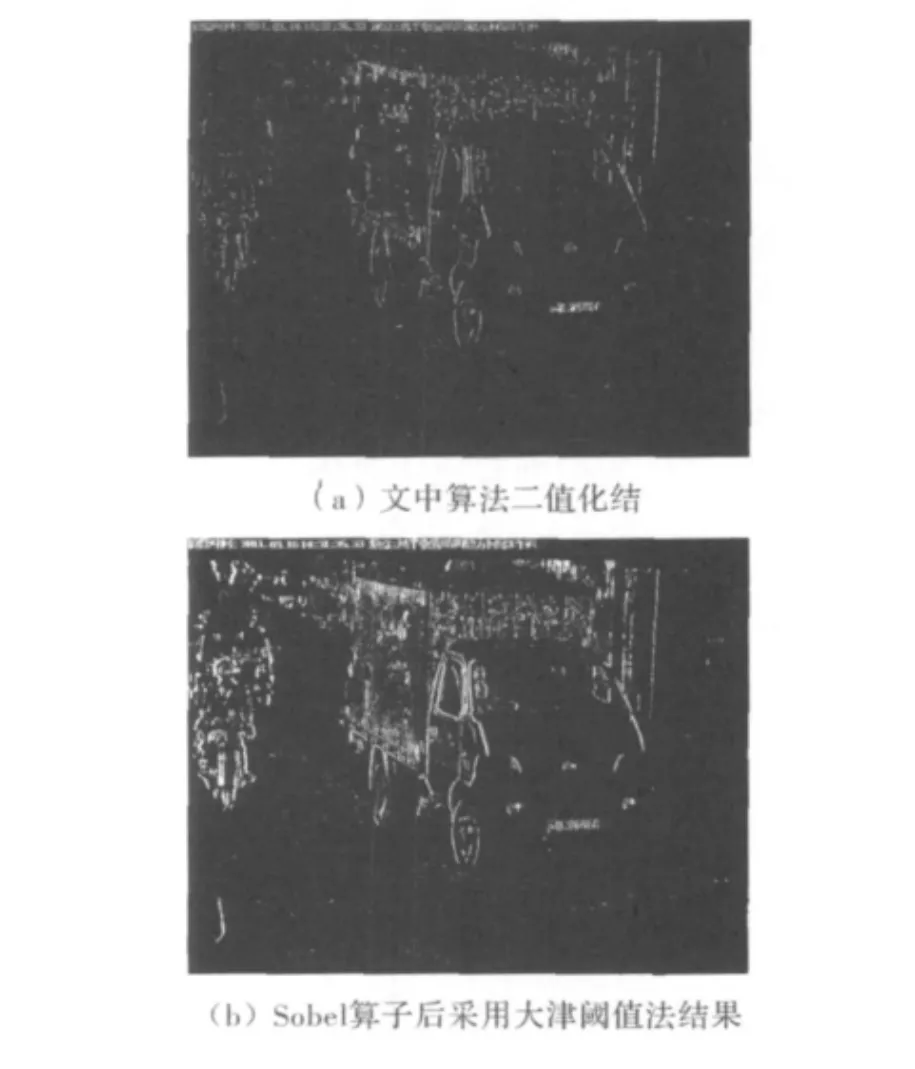
圖5 二值化結果
3.1 區域融合
由于二值化圖像中車牌區域的邊界比較密集,文中設計了如下區域算法將邊界密度較高的區域合并融合。
根據圖像中灰度值為255的點的水平和垂直距離進行融合,如果圖像同一行(列)兩個值為255的像素點距離<rgnX(rgnY),置該兩點之間所有的像素點的灰度值為255,文中取 rgnX,rgnY為11,3。
通過以上處理,可以將車牌區域融合成一個近似矩形的整體,以便接下來的車牌篩選,區域融合結果如圖6所示。

圖6 區域融合
3.2 開運算
膨脹是在二值圖像中“加長”或“變粗”的操作,A被B膨脹,記為A⊕B,定義如式(6)

腐蝕操作“收縮”或“細化”二值化圖像中的對象,可以消除圖像中的噪聲區域、粘連和毛刺等,數學上腐蝕定義為集合運算,A被B腐蝕,記為AΘB,定義如式(7)

先腐蝕后膨脹記為開運算,數學公式如式(8)

使用開運算能夠平滑對象的輪廓、斷開狹窄的連接、去掉細小的突出部分等[3]。文中采用5×3的矩形算子進行開運算操作。運算結果如圖7所示。
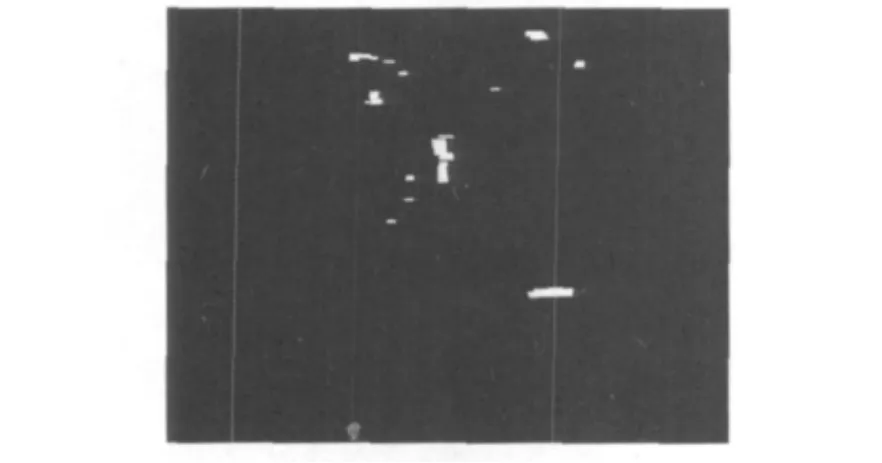
圖7 開運算
3.3 求連通域
目前提取目標常用的方法是基于目標輪廓的鏈碼跟蹤算法。鏈碼是圖像處理中基本描述手段,其特點是用一系列有特定起始點、長度和方向的線段來表述邊界,常用的鏈碼有4-鏈碼和8-鏈碼[10]。由于文中需要計算各連通域的面積,即像素灰度為255點數,采用如下方式計算連通域,用于提取目標。
用標志位Flagij表示(i,j)點是否已經訪問過;0表示未訪問;1表示訪問過;index表示連通域編號,Topindex,Bottomindex,Leftindex,Rightindex表示連通域 index的外接矩形信息;Areaindex表示連通域index的面積。
(1)初 始 化 Flagij,index,Topindex,Bottomindex,Leftindex,Rightindex,Areaindex為 0,初始化隊列。
(2)從左到右,從上到下搜索圖像,找到Flagij為0并且灰度為 255 的點(i,j),將 Flagij置為 1,index 加 1,Areaindex加 1,設置 Topindex,Bottomindex為j,Leftindex,Rightindex為i,并將此點(i,j)加入隊列,進入第2步,如果搜索至圖像末尾,結束搜索。
(3)如果隊列不為空,頭結點(i,j)出隊列,Flagij置為1,Areaindex加 1,調整 Topindex,Bottomindex,Leftindex,Rightindex的值:Topindex=min(j,Topindex),Bottomindex=max(j,Bottomindex),Leftindex=min(i,Leftindex),Rightindex=max(i,Rightindex)。搜索(i,j)點3×3鄰域內的點,如果Flagij為0并且灰度為255,將其加入隊列,循環第2部直至隊列為空。
(4)如果隊列為空,返回第2步。
至此連通域搜索結束,并得到了連通域的外接矩形、面積等信息,供下一步篩選使用。
3.4 篩選連通域
根據車牌大小設定連通域篩選的判定準則,如果某連通域的寬高比、寬高值及連通域面積符合要求,將該連通域添至車牌區,規則設置如下:
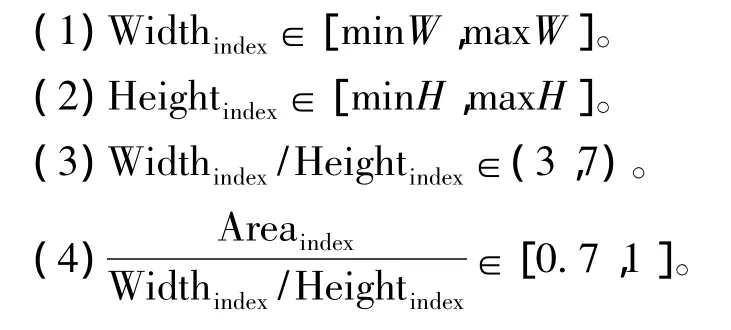
其中 Widthindex=Rightindex-Leftindex,Heightindex=Bottomindex-Topindex,minW,maxW,minH,maxH分別為車牌區域最小和最大的寬與高。
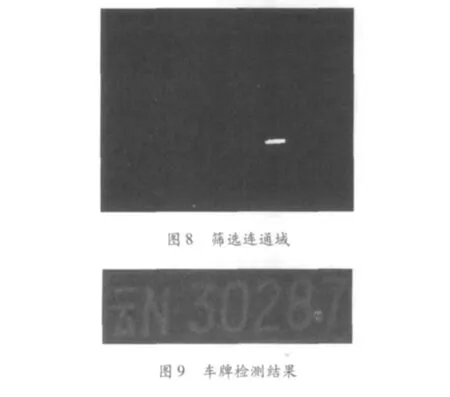
篩選連通域后的結果如圖8所示,根據連通域信息提取到的車牌圖像如圖9所示。
4 實驗結果
部分實驗結果圖像如圖10所示,文中算法對不同光照、對比度、傾斜角的車牌有較好的魯棒性。
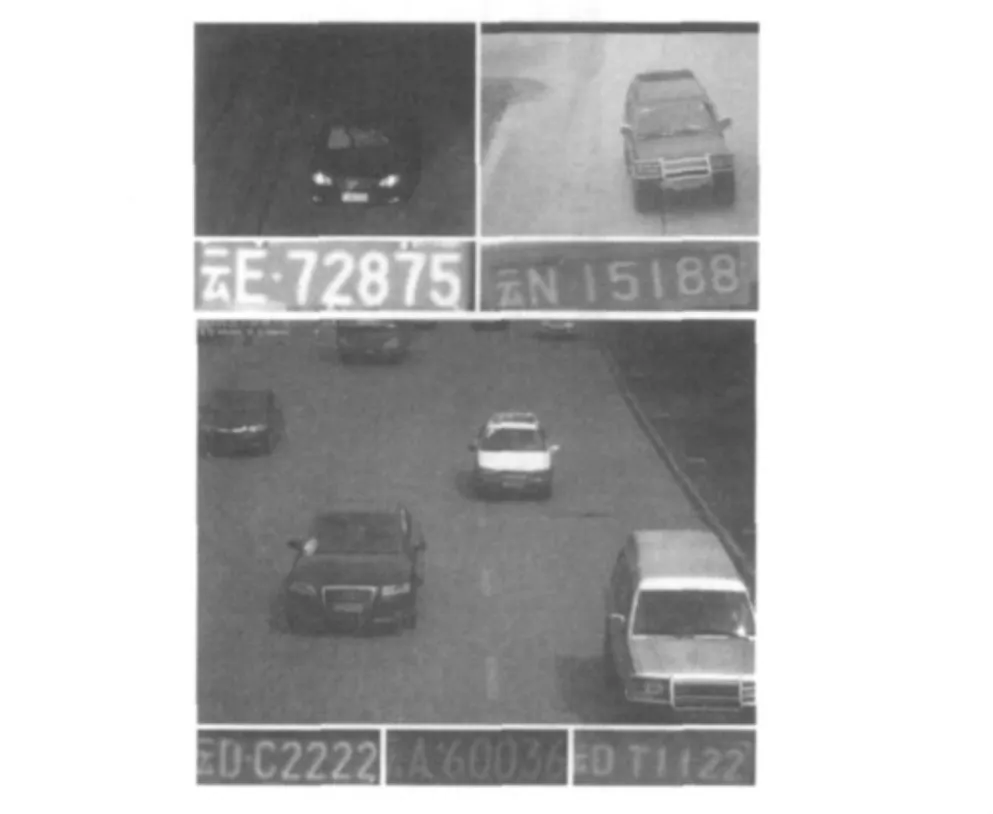
圖10 車牌提取結果
實驗采用的圖像庫有1 214幅圖像,其中共有1 554個車牌,圖像大小為1 600×1 264,為提高檢測效率,將圖像抽樣成為800×632大小進行檢測。使用本算法共檢測到1 462個車牌,檢測到的車牌中有67個檢測區域過大或偏移,漏檢92個,算法檢測率為94.1%。由于文中所使用的圖像庫包含了各種光照條件及車牌模糊嚴重等情況,導致檢測率有所下降。總體來說,提出的車牌檢測中的自適應二值化算法及區域融合定位算法能夠很好地定位車牌。
5 結束語
提出了一種根據圖像區域亮度和標準差設定閾值的自適應二值化算法,很好的保留了車牌區域,為后序處理做了一個良好的基礎。接下來根據數學形態學的方法從圖像中提取車牌,由于二值化部分處理的精確,得到了很好的檢測效果,但由于提出的自適應二值化算法在噪聲處理上沒有做出更好的優化,可能導致車牌區域定位得過大,影響檢測效果,同時也可能將一些邊界豐富的區域誤檢測成為車牌區域,這是今后需要進一步研究和改進的。
[1]蒲東兵,趙大偉,趙東來,等.一種快速車牌定位算法[J].微型電腦應用,2010,26(4):42 -44.
[2]黃劍玲,鄒輝.邊緣檢測算子在汽車牌照檢測中的研究[J].圖像處理,2007,12(3):303 -305.
[3]阮秋琪.數字圖像處理[M].北京:電子工業出版社,2009.
[4]姜誼,嚴京旗.車牌定位及傾斜校正方法[J].微型電腦應用,2010,26(4):45 -47.
[5]VAHID A,ALIREZA A.An edge-based color-aided method for license plate detection[J].Image and Vision Computing,2009,27(8):1134 -1142.
[6]OTSU N.A threshold selection method from gray- level histogram[J].IEEE Transactions on Systems Man and Cybernetics,1979,SMC -9(1):62 -66.
[7]SHYANG L,CHANG Lishien,CHEN L,et al.Automatic license plate recognition[J].IEEE Transactions on Intelligent Transportation Systems,2004,5(1):42 -53.
[8]ZHENG Danian,ZHAO Yannan,WANG Jiaxin.An efficient method of license plate location [J].Pattern Recognition Letters,2005,26(9):2431 -2438.
[9]ZHANG Xiangdong,SHEN Peiyi.A license plate recognition system based on tamura texture in complex conditions[C].Harbin:IEEE International Conference on Information and Automation,2010:1947 -1952.
[10]REN Mingwu,YANG Jingyu,SUN Han.Tracing boundary contours in a binary image[J].Image and Vision Computing,2002,20(2):125 -131.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44