不確定性復雜系統的智能融合控制策略
2011-05-18 07:48:52鄧新莉周江川張四平
重慶理工大學學報(自然科學) 2011年3期
鄧新莉,周江川,劉 珊,張四平
(1.重慶漢錦科技公司,重慶400010;2.四川兵工學報編輯部,重慶400050)
隨著科技現代化進程的推進,對控制技術提出了愈來愈高的要求。以塑膠制品的硫化過程控制為例,它是在一定溫度和壓力條件下,使膠料和各種助劑發生交聯等化學反應,達到所需要的機械和物理化學性能,而實際上橡膠這種高分子材料,沒有一個固定的化學分子式,即使是同一種原材料,其分子量可能相差上百倍,甚至上萬倍,硫化工藝不具有明顯的規律性,其硫化過程是模糊的,與膠料的配方、性質、產品結構和工藝條件等許多不確定性因素密切相關,如何對這類不確定性復雜過程(或對象)進行有效控制已經成為人們關注的焦點之一。
1 控制中存在的問題和復雜系統的對象特性
1.1 控制中存在的問題
對大型復雜過程(或對象)的控制,一般是按某種準則在系統低層將其分解為若干子系統實施控制,在上層協調各子系統之間的性能指標,使集成后的系統處于某種意義下的優化狀態。控制中主要存在如下問題:
1)不確定性問題。傳統控制是基于數學模型的控制,即認為控制、對象和干擾的模型是已知的或者通過辯識可以得到的。但復雜系統中的很多控制問題具有不確定性,甚至在一定條件下會發生突變。對于“未知”、不確定、或者知之甚少的控制問題,用傳統方法難以建模,因而難以實現有效控制。
2)高度非線性問題。傳統控制理論中,對于具有高度非線性的控制對象,雖然也有一些非線性方法可以利用,但總體上看,非線性理論遠不如線性理論成熟,因方法過分復雜在工程上難以應用。在復雜系統中有大量的非線性問題存在。
3)半結構化與非結構化問題。傳統控制理論主要采用微分方程、狀態方程以及各種數學變換作為研究工具,其本質是一種數值計算方法,屬定量控制范疇,要求控制問題結構化程度高,易于用定量數學方法進行描述或建模。而復雜系統中最關注和需要支持的,有時恰恰是半結構化與非結構化問題。
4)系統復雜性問題。按系統工程觀點,廣義的對象應包括通常意義下的操作對象和所處的環境。復雜系統中各子系統之間關系錯綜復雜,各要素間高度耦合、互相制約,外部環境又極其復雜,有時甚至變化莫測,因此傳統控制缺乏有效的解決方法。
5)可靠性問題。常規的基于數學模型的控制問題傾向于是一個相互依賴的整體,盡管基于這種方法的系統經常存在魯棒性與靈敏度之間的矛盾,但對簡單系統,其控制可靠性問題并不突出。而對復雜系統,如果采用上述方法,則可能由于條件的改變使得整個控制系統崩潰。
1.2 復雜對象的控制論特性
歸納復雜對象控制存在的上述問題,從控制論角度思考,主要表現為以下特性:系統參數的未知性、時變性、隨機性和分散性,系統時滯的未知性和時變性,系統嚴重的非線性,系統各變量間的關聯性,環境干擾的未知性、多樣性和隨機性[1]。面對這些特性,因其屬于不確定性復雜對象(或過程)的控制問題,傳統的控制方法難以對這類對象進行有效控制,必須探索更有效的控制策略。
2 控制模型與控制策略
2.1 控制模型
由于被控對象的復雜性和不確定性,按照傳統方法,根據被控對象的數學模型,在滿足性能指標及約束條件下,綜合設計控制器的方法是不能用的,因為對于復雜對象不可能建立嚴格的數學模型,綜合設計系統的前提條件不存在。對復雜系統的控制,可采用以知識表示的非數學的廣義控制模型,如圖1所示。

圖1 廣義控制模型
事實上,人們對對象(或過程)特性并不是一無所知,而是知之不全,即人們所具有的對象信息是灰色信息。在實際工程中,依靠控制專家和操作者長期積累的知識和經驗,也可以對系統進行有效控制,甚至獲得滿意的控制效果。它是基于人的智能,控制者的知識、經驗和技巧完成預定的控制任務,因此,這種模型是人機結合的控制模型,即控制者(人)的模型和被控對象(機)的模型相結合,如控制者的知識模型和被控制對象的機理模型相結合的廣義控制模型。
2.2 控制策略選取
對不確定性復雜系統所具有上述特性,可供選擇的策略有神經網絡控制[2]、模糊控制[3]、實時專家系統控制[4]、遺傳算法控制[5]、免疫進化控制[6]、仿人智能控制[7]等,這些策略在現實應用中針對特定對象都顯示出了較強的生命力,為復雜系統的控制提供了新的思路和視角,豐富了控制理論的內容,有重要的理論價值和和廣闊的應用背景[8]。
模糊控制能將操作者或專家的控制經驗和知識表示成語言變量描述的控制規則,借助這些規則去控制系統。它適用于數學模型未知、復雜的非線性系統的控制。但模糊理論到目前為止并非盡善盡美,對不確定性復雜系統難以獲得好的控制效果,因為控制規則難以確定,需要與其他方法配合使用。
ANN(人工神經網絡)控制的最大優點是可以充分逼近任意復雜的非線性關系,有較強的學習能力和容錯性,能夠處理定量、定性數據,利用連接的結構與其他控制方法及人工智能相結合。其預測能力在很大程度上依賴于訓練數據的狀況,但存在某些缺點:不適合表達基于規則的知識,不能很好地利用已有的經驗知識,網絡訓練時間長有可能導致陷入非要求的局部極值。如果數據中有干擾和不確定性,則過界問題常會出現。但是改進的神經網絡以及與其他智能控制技術結合可以在一定程度上彌補上述不足[9]。
遺傳算法是一種基于自然選擇和基因遺傳學原理的優化搜索方法,具有全局尋優的能力,可從廣泛分布于設計選項的潛在方案中進行優化篩選。遺傳算法早期存在過早收斂的缺點,但經過改進,尤其是與神經網絡和模糊控制相結合使用,在一定程度上可克服上述缺點[10]。
專家系統是一種智能化的計算機程序系統,能夠利用人類專家的知識和解決問題的方法以處理某領域的問題,是智能控制的一個重要分支,但由于特征信息的采集、特征信息的表達以及完備知識庫建立等的實現難度大,所以專家控制系統未必對所有的不確定性復雜對象都是好的選擇。
值得注意的是仿人智能控制HSIC(human simulated intelligent control)策略,其在結構和功能上具有以下基本特征:分層遞階的信息處理和決策機構(高階產生式系統結構);在線的特征識別和特征記憶;開閉環控制結合和定性決策與定量控制結合的多模態控制;啟發式和直覺推理邏輯的應用。由于它的基本特點是模仿控制專家的控制行為,因此,它的控制算法是多模態的控制,是多種模態控制間的相互交替使用。該特點可使其控制算法完美地協調控制系統中諸多相互矛盾的控制品質的要求,比如魯棒性與精確性、快速性與平滑性等,因而也更貼近實際[11]。
上述分析表明,如以HSIC為基礎,融合其他控制技術,構成智能融合的控制策略,一定會更加貼近不確定性復雜系統控制的工程實際而取得良好的控制效果。
3 控制算法結構模式
3.1 知識的獲取與知識集的建立
知識表示是指從外部知識源到計算機內部的轉換過程。知識表示方法主要分為3類:基于規則的表示法、基于框架的表示法和面向對象的表示法。常用的分類是將這3類知識表示方法歸為兩大類別:產生式表示法和面向對象表示法。前者是一種典型規則表示法,這種表示法的優點是表現形式單一直觀,有利于知識的提取和形式化,在計算機上容易實現。后者則更符合人們對客觀世界的認識和思維的過程,正在成為當前程序設計的主流方向[3],但其在計算機上實現還有一定的難度。文中采用產生式表示法。
建立知識集實際上是如何表達已獲取的知識。控制系統采用產生式規則來建立知識集,其基本結構是
IF<condition>THEN<action>
基于產生式規則構成的系統的突出優點是模塊性好,每條規則可獨立增刪、修改,每個產生式規則之間無直接聯系,而且其自然性好,適合于工業過程控制。
3.2 控制算法
工程控制算法的控制規則集可由工程控制算法推演出來。現以仿人智能控制的原型算法為例,控制算法為

式中:u為控制輸出;Kp為比例系數;k為抑制系數;e為系統誤差;為系統誤差的變化率;em,i為誤差第i次峰值。
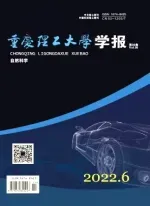
不確定性復雜系統的參數控制規則集是在上述原型算法的基礎上進一步總結人的控制經驗而建立的一套適合于不同特征狀況的控制規則,具體規則為:
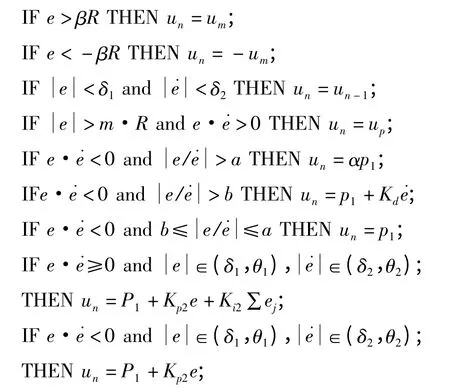
其中:un為控制器的第n次輸出值;um為與輸入變化量ΔR有關的一個輸出保持值;up為強制保持值;e、為系統偏差及其變化率;為對象輸出的變化率;為控制器輸出的最近一次保持值,式中em,i為偏差的第次極值,r為極值加權因子,可在線修正;Kp1、Kp2、Ki1、Ki2、Kd為比例、積分和微分增益;為在e·≥0期間內偏差的累計;β為切換因子;α、a、b為常數,由知識集中的經驗規則確定;R為設定值;δ1、δ2、θ1、θ2為允許的誤差及誤差速率范圍。
4 系統仿真
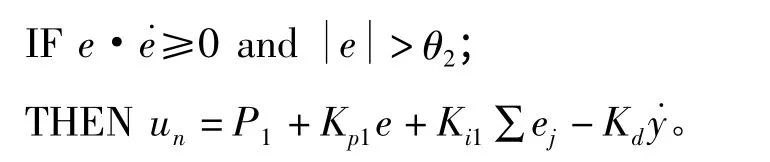
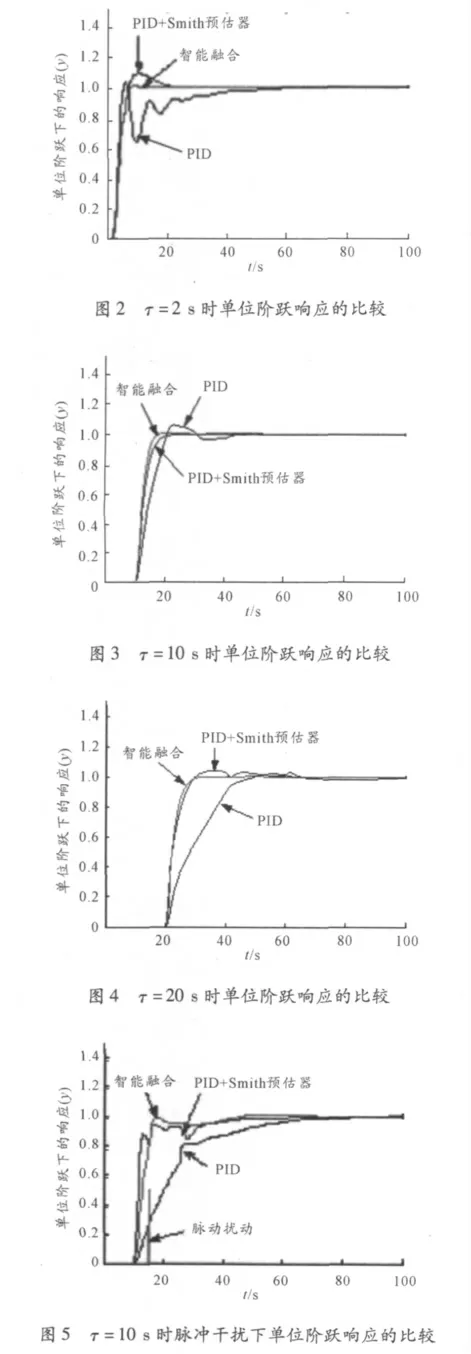
由于是不確定性復雜系統,難以建立數學模型,為了驗證控制策略的正確性,可以采用對象或過程參數變化的方式以等效替代的方法,考察控制算法的魯棒性,如果控制算法魯棒性強,那么控制策略是可取的。現以工業控制對象中常見的二階環節大滯后環節為例,分別采用PID、PID+Smith預估器和智能融合控制算法進行仿真,考察其魯棒性。設被控對象控制模型為
在延遲時間分別為τ=2 s,τ=10 s和τ=20 s時對系統進行仿真比較,響應曲線如圖2~4所示。圖5顯示的是加入外部擾動時的響應曲線,加入的擾動為脈沖信號,其寬度為0.2 s,振幅為0.5。
從圖2~4可以看出,無論從系統響應的快速性、穩定性、超調,還是系統的抗干擾能力,智能融合控制策略的性能都優于PID控制和PID+Smith預估器的最優控制。
綜上所述,對于不確定性復雜系統中的一些難控特性,智能融合控制策略表現出了很好的控制效果,是一種可供首選的控制策略。
5 結束語
對不確定性復雜系統的控制,由于智能融合控制策略對過程參數變化不是很敏感,具有很強的魯棒性,不論在穩定性、快速性以及準確性方面都比其他控制策略有明顯的優越性。當系統中加入擾動信號,仍然可以保持較好的控制效果,顯示出其具有很強的抗干擾能力。
[1] 彭莉,林鷹,楊奕.復雜系統控制中的相關技術討論[J].西南師范大學學報,2004,29(6):1066-1068.
[2] 滕云,賀春林,岳淼.基于神經網絡的語音識別研究[J].重慶師范大學學報:自然科學版,2010,27(4):73-76.
[3] 吳垣甫.神經模糊控制在機器人導航中的應用[J].四川兵工學報,2009,30(5):111-115.
[4] 李娟,明德廷,楊珺.基于模糊推理的農業專家系統研究[J].安徽農業科學,2010,38(6):3277-3279,3281.
[5] 鐘靜,應宏.優化和約束推理的動態分布式雙向導遺傳算法[J].重慶師范大學學報:自然科學版,2009,26(2):94-98.
[6] 黨媛,李祚泳,鄒艷玲.基于蜜蜂免疫進化算法的湖泊富營養化評價[J].安徽農業科學,2010,38(16):8618-8619,8695.
[7] 李鐵軍,陳虹宇,邵桂芳.基于仿人智能控制的機器人動態目標跟蹤[J].重慶工學院學報:自然科學版,2009,23(11):64-69.
[8]Cai Zixing,Zhou Xiang,Li Meiyi.A Novel Intelligent-Control Method Evolutionary Control[C]//Proceedings of the 3’d World Congress on Intelligent Control and Automation.[S.l.]:[s.n.],2000:387-390.
[9] 李祖樞,涂亞慶.仿人智能控制[M].北京:國防工業出版社,2003.
[10]劉太杰,崔莉鳳,劉載文.污水處理智能控制進展[J].北京工商大學學報,2005,23(3):9-12.
[11]楊飚,張曾科.仿人智能控制器的動態特性參數整定方法[J].信息與控制,2004,33(6):670-673.
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
消費導刊(2018年10期)2018-08-20 02:57:02
Coco薇(2017年11期)2018-01-03 20:59:57