面向目標偵測的非配合式無線傳感器網絡研究*
2011-05-06 01:57:56曹奕濤
傳感技術學報 2011年3期
楊 波,曹奕濤
(北京航空航天大學自動化科學與電氣工程學院,北京100191)
軍用無人機是充分利用信息技術革命成果而發展起來的一種高性能信息化武器裝備,它的一個重要作用就是實施偵察功能,進行戰略、戰役和戰術偵察。隨著信息戰的日益多樣化和復雜化,在很多情況下,僅僅靠無人機飛過目標很難預計或預測以后的變化,在日益復雜的作戰背景下,單憑無人機的力量不足以完成偵察目標的任務,需要把遠距傳感器放到接近目標的地方,監視目標的一舉一動,協同無人機執行偵察任務。
本文結合軍事偵查需求,主要研究無線傳感器網絡在軍事領域尤其是軍事入侵檢測領域的應用,目前,對進入監測領域目標進行識別與跟蹤是無線傳感器網絡研究中的熱點,也是研究難點,具有重要的理論意義和實用價值[1-5]。因此,本文主要研究在傳感器節點能量、處理能力等資源嚴重受限的情況下實現對重點區域的目標監測、識別與軌跡預測。
非配合式無線傳感器網絡系統常用于軍事領域中的戰場監視、民用領域中的入侵監測等應用中。與配合式系統相比,非配合式系統的難度顯著增加,因為目標不能發出特征已知的信號配合網絡的偵測,需要在低成本的傳感器節點上實現準確的目標檢測與目標識別算法,同時降低系統的虛警率與漏檢率[6-11]。國內在無線傳感器網絡領域對配合式的目標跟蹤與定位研究較多,但對非配合的目標跟蹤研究還處于起步階段。如何將復雜的頻譜分析、濾波算法等信號處理方法應用到資源有限的傳感器節點上,是非配合式系統最大的挑戰。準確提取目標特征非常重要,需要有全面的應用背景知識作為基礎。此外,由于無法預知非配合式目標何時出現,必須在目標未出現時系統的低能耗與目標出現時系統響應的靈敏性之間進行權衡。
1 硬件系統
無線傳感器網絡硬件節點的無線通信模塊和處理器模塊選用協議芯片CC2430,電源模塊采用外部5V直流供電和電池供電兩種方式,方便調試。
考慮到檢測目標主要針對戰場環境中的人員與車輛,人又分為普通行人與武裝人員,武裝人員帶有槍支等具有鐵磁特性的物質。可以采用傳感器敏感目標的不同特征,如聲音、震動、磁場等。在選擇傳感器時,像圖像和雷達等傳感器雖然目標信息豐富,但不適于能量和處理資源有限的無線傳感器網絡節點。那些只需簡單處理算法且低功耗的傳感器可以通過組合方式和多傳感器信息融合,從而達到較高的檢測率和較低的分類錯誤率。因此,本文最終選擇聲音、磁阻和紅外傳感器三種傳感器。
通過這幾種傳感器的數據融合,按照以下邏輯關系可以實現對三類目標的檢測和分類。
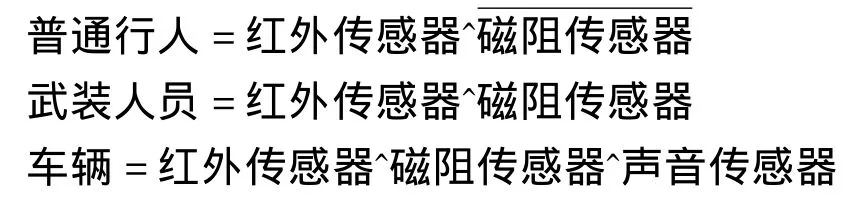
普通行人檢測動用紅外傳感器和磁阻傳感器;武裝人員檢測動用紅外傳感器和磁阻傳感器;車輛檢測動用紅外傳感器、磁阻傳感器和聲音傳感器。
聲音傳感器選用小型、低功耗和高靈敏度的傳感器WM-62A;磁阻傳感器為霍尼韋爾雙軸線性磁阻傳感器HMC1052;紅外傳感器選擇瑞士Kube公司生產的C172型紅外傳感器及TR230菲涅爾透鏡,該傳感器具有低功耗、小體積和檢測距離遠等特點。由于紅外傳感器檢測視角有方向性,可以通過四個紅外傳感器的組合實現全方位的目標檢測。
表1中列出了三種傳感器對不同目標的檢測范圍。在所使用的傳感器中,紅外傳感器檢測范圍大,敏感所有目標,不易受到環境干擾,因此將其作為節點的“喚醒傳感器”。當紅外傳感器檢測到目標后,喚醒傳感器節點后打開聲音和磁阻傳感器的供電電路,再利用多傳感器的數據融合,實現對目標的可靠檢測。
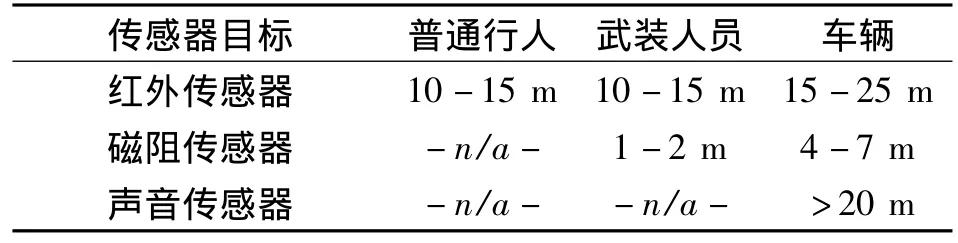
表1 不同傳感器對不同目標的檢測范圍
研制的傳感器節點實物圖片如圖1所示。
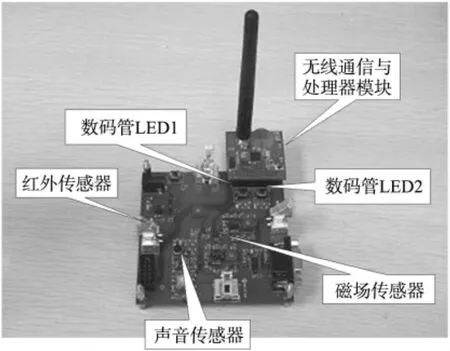
圖1 傳感器節點實物圖片
2 傳感器檢測原理與多傳感器數據融合
2.1 目標檢測分析
目標分為四種情況:無目標、普通人員、武裝人員和車輛。當無目標出現時,節點處于深度睡眠狀態,節省能量;當紅外傳感器檢測有目標出現時,節點被喚醒,其中車輛目標有典型的磁場和聲音特征,武裝人員與車輛區別在于有磁場特征但較弱,聲音特征不明顯,普通人員與武裝人員相比沒有典型的磁場特征。由于節點的能量和資源有限,無法采用高端處理器,因此特征量的提取主要采用時域處理方法,通過傳感器數據融合,達到正確識別目標的目的。
檢測和識別方案如圖2所示。

圖2 目標檢測方案
2.2 傳感器檢測原理
2.2.1 紅外傳感器檢測原理
紅外傳感器調理電路分為兩路輸出,一是模擬輸出,接CC2430的P0.7口,二是數字輸出,接P1.4口。當模擬輸出端的電壓超過數字端雙限比較器的門檻電壓后,數字端輸出端由高電平變為低電平,產生下降沿信號,通過P1.4口達到喚醒處理器的目的。節點被喚醒后,處于正常工作狀態,然后讀取紅外傳感器模擬輸出的值,當連續一段時間讀到模擬輸出在門檻電壓之間時,處理器進入深度睡眠狀態。這樣一來,便可通過傳感器模擬端輸出電壓變化和數字端輸出電平變化實現處理器的睡眠與喚醒。
2.2.2 磁阻傳感器檢測原理
(1)磁阻傳感器信號特征與分析
圖3為磁阻傳感器所做的測試示意圖及高爾夫車輛經過時磁阻傳感器A、B軸的輸出波形,其中車輛與傳感器的垂直距離為1 m,車輛行駛速度為10 km/h,采樣周期為 0.002 s。
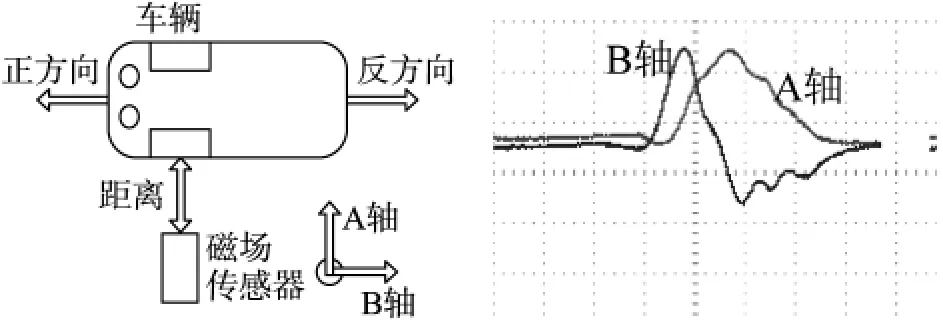
圖3 磁阻傳感器測試圖及傳感器輸出信號
磁阻傳感器信號變化比較緩慢,對磁阻傳感器信號進行時域和頻域分析,當車輛低速行駛時,從對信號的離散傅立葉變化得出信號主要集中在直流到50 Hz左右,因此可以通過簡單的數字濾波和設置閾值實現車輛的可靠檢測。
2 磁阻傳感器檢測算法
由于所處區域不同以及傳感器節點擺放方向的不同,磁阻傳感器的輸出差異較大,所以首先要對傳感器輸出進行標定,通過軟件實現,在程序初始化過程中,對磁阻傳感器的輸出進行連續10次采樣,去掉最大值和最小值,再對剩下的8次采樣值取算術平均,作為每個軸的輸出標準。
對磁阻傳感器的采樣采用中值濾波。中值濾波法比較適用于去掉偶然因素引起的波動和采樣器不穩定而引起的脈動干擾。將每次采樣的值存入數組,當達到第10個數后,將傳感器所得的10次采樣值分別與設定的檢測閾值做比較,當檢測到采樣所得值超過閾值時,計數器加1,當計數器值大于3時,即認為檢測到目標。由于磁阻傳感器有兩路輸出,分別對兩路輸出做以上判斷,即可達到對目標的可靠檢測(圖4)。

圖4 磁阻傳感器檢測原理圖
2.2.3 聲音傳感器檢測原理
聲音傳感器的信號輸出較為復雜,信號極易受到干擾,由于實驗室條件所限和實際測試的困難,在實驗室條件下用蜂鳴器聲音代替車輛經過的聲音。圖5(a)聲音傳感器檢測蜂鳴器產生的聲音信號,橫軸虛線間隔為 250 μs,采樣周期 1 μs,圖 5(b)為人員腳步走動時聲音傳感器采集到的聲音信號,橫軸虛線間隔為250 ms,采樣周期為1 ms。
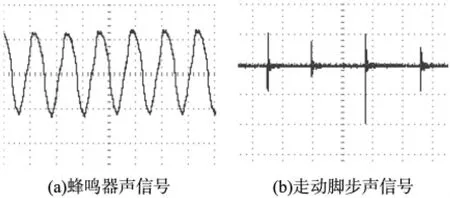
圖5 蜂鳴器產生的聲音信號及人員腳步聲音信號
人員走動與車輛行駛產生的聲音信號具有以下基本特征:
(1)探測目標信號同目標與傳感器之間的距離有關,隨著距離的增大,時域信號的幅值逐漸衰減。
(2)人員腳步信號是脈沖式的,且不同腳步的信號波形近似為離散的。而車輛運動產生的聲音信號是連續變化的。此外,聲音傳感器對人員腳步聲音的檢測檢測距離有限,只有在近距離通過時,才能保證可靠檢測。對于車輛,則有較遠的檢測距離,在實驗室條件下測試,對蜂鳴器的檢測距離可以達到10 m~15 m。
采用過零數分析方法。當采樣頻率為1 kHz,采樣時間為1 s時,每組有1 000個數據,對比可以發現,蜂鳴器產生的信號特征過零點數遠大于人員腳步產生的信號特征的過零數,因此,選擇合適的過零數分界點M,可以達到區分人員與車輛的目的,原理見圖6所示。

圖6 聲音傳感器檢測原理圖
2.3 多傳感器數據融合
受到無線傳感器網絡節點檢測能力、計算能力、能量資源、存儲資源、帶寬資源等限制,本文的多傳感器數據融合采用分布式決策層融合結構。用于融合身份估計的技術包括Bayes推理、D-S方法等。由于D-S證據理論的廣泛適用性,可以在不同層次上對證據進行組合,不需要先驗概率和條件概率,能區分不確定和不知道,是Bayes理論的推廣,所以系統采用D-S方法對多傳感器的信息進行融合[12]。
2.3.1 融合系統結構
系統的任務之一就是識別目標(目標身份識別),所以探測單元中數據融合中心的融合方式屬于目標識別級的融合。紅外、聲音和磁阻傳感器分別都完成一定的變換來獲得獨立的身份估計,然后再在融合中心對來自每個傳感器的屬性分類進行融合。
數據融合框圖如圖7所示。
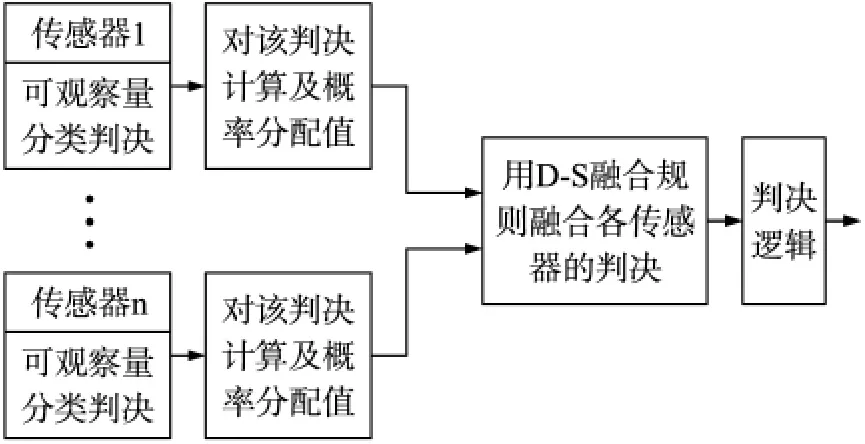
圖7 融合系統框圖
這里對每個傳感器k(k=1…n,n=3)所能得到的知識即對物體類型的判別賦予一個0到1之間的概率分配值,即基本概率賦值,反映了對該判決的確信程度,賦值越接近于1,說明該判決越有明確的證據支持。
在多傳感器探測系統中,系統檢測部分集合了紅外、聲音和磁場三種傳感器,分別對目標進行檢測,傳感器的原始數據經過一定的變換處理和特征提取后,得到了各自關于目標的身份估計,然后,各自的身份估計數據進行融合處理,按照一定的判決準則,得到全局的關于目標的身份判別。
2.3.2 基本概率賦值的獲取及證據組合
實際應用中,基本概率賦值獲得的方法有很多,根據試驗情況,采用了利用統計證據來獲得基本概率賦值的方法。
在實驗室條件下,采用“人+玩具小車+鐵磁物質+蜂鳴器”組合代表監測環境中的車輛目標,用“人+玩具小車”組合模擬監測環境中的武裝人員。
根據檢測系統要求,把檢測目標集合定義為3種類型,即Θ={O1車輛、O2武裝人員、O3普通行人}。
為了簡化計算和表示,根據探測目標類型,定義鐵磁物質目標O4={O1車輛、O2武裝人員},定義人員目標O5={O2武裝人員,O3普通行人}。設探測目標{O1,O5}的聲音特征的聲音傳感器為X1;探測目標{O3,O4}磁場特征的磁阻傳感器為X2;探測目標{O1,O2,O3}紅外特征的紅外傳感器X3。
以目標O3為例說明基本概率賦值及證據組合過程,將目標O3作為實驗目標,通過30次統計試驗,得到了關于目標集合各個傳感器的基本概率賦值如下:
傳感器X1對目標集合Θ里目標的基本概率賦值如表2所示。

表2 傳感器X1的基本概率賦值
傳感器X2對目標集合Θ里目標的基本概率賦值如表3所示。
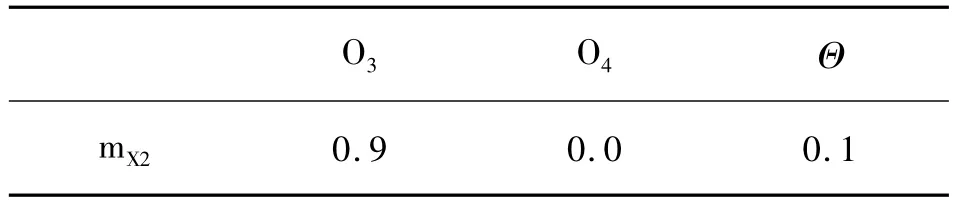
表3 傳感器X2的基本概率賦值
根據D-S證據組合規則,將聲音和磁阻傳感器進行數據融合,組合情況如表4所示。
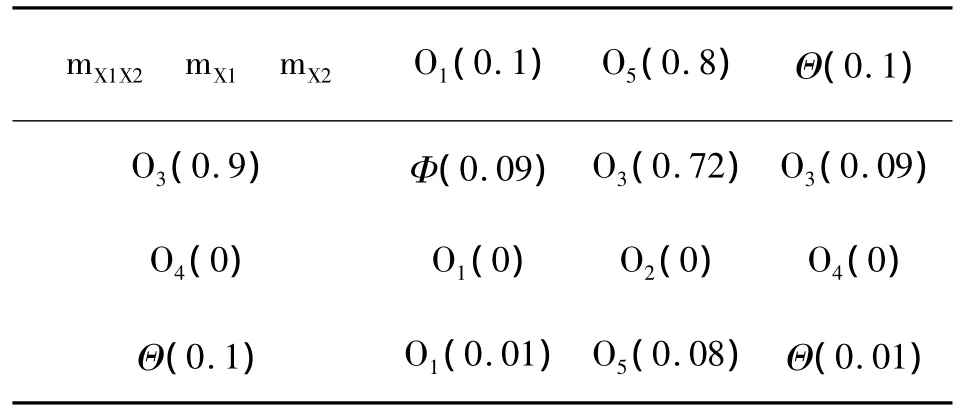
表4 傳感器X1和X2融合表
根據前面所述的證據組合規則,從表上的數據可以看出,聲音和磁阻傳感器的證據組合的不一致因子 K=0.09。
于是得到組合后的基本概率賦值為:
當采用基于概率賦值的決策方法時,若選擇合適的判定門限,則最終決策為O3,即普通行人,從上面得出的融合的結果來看,融合和傳感器節點目標識別的不確定性降低,且融合判別后的結果與實驗的目標一致,證明融合是有效的。
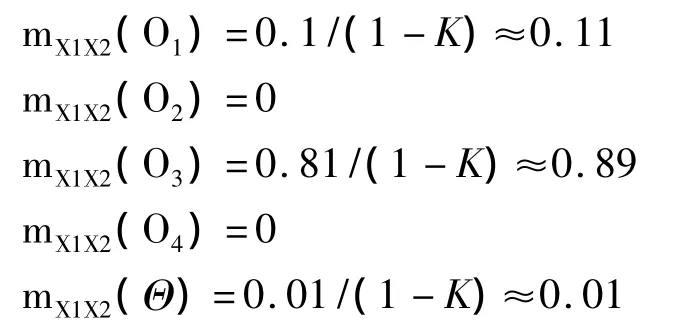
對于目標的位置估計,參考雙元檢測協作跟蹤的思想(圖8),雙元檢測傳感器不能檢測到目標的距離,只能判斷目標是否在偵測范圍內[13]。因此檢測到目標的節點只能確定包含目標的圓形區域,需要多個節點協作才能確定目標的位置信息。當目標進入偵測區域后,在節點足夠密集的情況下,任何時刻都有多個節點同時偵測到目標的位置區域。這些節點偵測范圍的重疊區域是一個相對較小的區域,目標就處于這個重疊區域內,這樣,就能相對精確的確定目標位置。基于雙元檢測的協作跟蹤適用于簡單低廉的傳感器節點,并通過大量密集部署節點保證跟蹤精度。基于雙元檢測的協作跟蹤需要節點間的時鐘同步,并要求節點知道自身的位置信息,當節點密度足夠高時,我們也可以通過這種方式達到預測目標運動軌跡的目的。
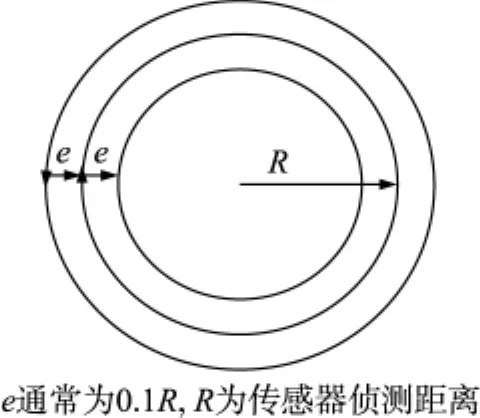
圖8 雙元檢測模型
3 系統軟件設計
系統軟件主要三大部分組成:(1)匯聚節點軟件負責網絡組建與維護,接收檢測節點發送的檢測信息,經串口轉發至上位機進行處理;(2)檢測節點軟件負責傳感器信號采集與處理和傳感器數據融合,同時將處理結果通過無線方式發送至匯聚節點;(3)上位機軟件主要完成目標報警、目標檢測結果顯示及數據存儲等功能。
軟件部分主要介紹檢測節點中傳感器數據融合和身份判決的過程。
當得到各傳感器的檢測結果后,程序進入融合和判決部分。以數組的方式定義各傳感器對不同目標的基本概率賦值。讀取到正確數據并完成全部數據融合處理后,進入判別輸出部分,實現對融合結果的身份判斷。整個過程原理如圖9所示。
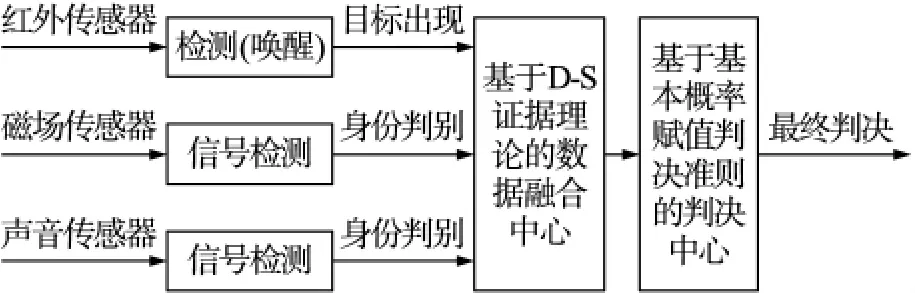
圖9 多傳感器數據融合原理圖
4 實驗平臺搭建及實驗測試
為了檢驗系統設計的有效性,分別進行了節點硬件設計測試、傳感器節點組網測試、紅外傳感器睡眠喚醒測試、磁阻傳感器檢測測試、聲音傳感器檢測測試及多傳感器數據融合測試。
4.1 紅外傳感器喚醒功能測試
傳感器節點的睡眠功能主要通過紅外傳感器來實現,每個節點有四個紅外傳感器,分別對應于四個方向(見圖1)。各傳感器檢測視角約為100°,通過四個紅外傳感器可實現全方位目標檢測。無目標時,傳感器節點進入睡眠狀態,LED1滅。當有目標進入后,傳感器節點被喚醒,LED1亮,目標消失后,LED1滅,節點睡眠。經過測試,紅外傳感器對目標喚醒距離為8 m~10 m,可以實現全方位的目標檢測。
4.2 磁阻傳感器檢測測試
在實驗室搭建如下平臺,五個節點組成星型網絡,玩具小車為實驗過程中的檢測目標,車上裝有鐵磁物質。四個檢測節點如圖10所示,間隔為70 cm×70 cm,檢測節點對小車的檢測范圍大約40 cm,一個匯聚節點通過串口與計算機相連。

圖10 從節點監控陣列及主節點與監控終端
上位機測試軟件采用四個綠色小圓圈代表圖9中的傳感器檢測節點,當目標進入檢測區域時,上位機通過判斷,將圖中該傳感器節點的綠色小圓圈變為紅色。節點密度足夠高時,可以通過這種方式達到估計目標運動軌跡的目的
當裝有鐵磁物質的玩具小車沿著圖11所示直線運動時,發現首先1號節點由綠色變為紅色,然后3號節點由綠色變為紅色。當小車離開傳感器節點檢測區域后,可以估計小車運動軌跡如圖12中的黑粗箭頭所示。當不含鐵磁物質的玩具小車沿上述軌跡運動時,軟件中沒有任何傳感器節點變為紅色,可以判斷無目標進入器監測區域。
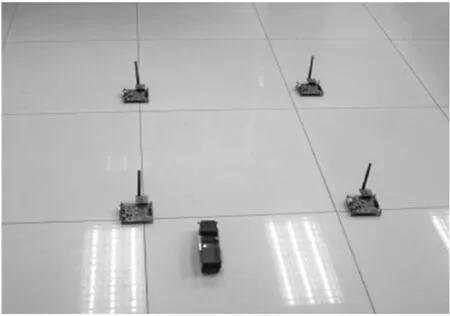
圖11 玩具小車運動軌跡圖
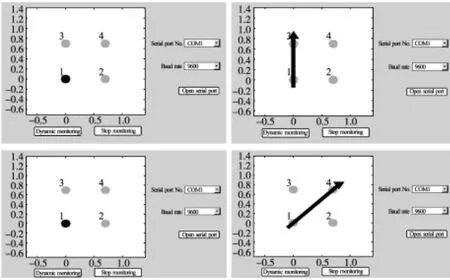
圖12 上位機監控軟件實時顯示
4.3 聲音傳感器檢測測試
主要驗證檢測算法對聲音信號可靠檢測及區分車輛連續聲音信號和脈沖信號特征。
當檢測節點檢測到蜂鳴器連續聲音信號特征或腳步等具有脈沖信號特征的聲音后,分別向匯聚節點發送數據幀0×01和0×02,在上位機串口調試助手的接收端顯示接收數據。經過蜂鳴器和在節點附近走動多次測試后,均能夠檢測到目標,同時可以區分出不同的聲音信號特征。
4.4 多傳感器數據融合測試
多傳感器數據融合測試為了驗證數據融合在提高檢測精度和目標識別率方面的作用。
4.4.1 測試方法
由于紅外傳感器在系統中主要起到睡眠喚醒的作用,當紅外傳感器檢測到目標后,節點喚醒,這時認為有三類目標進入監測領域,聲音和磁阻傳感器開始工作,通過傳感器的數據融合,達到對目標更深入的檢測和識別。
如前所述,實驗室條件下采用“人+玩具小車+鐵磁物質+蜂鳴器”組合代表監測環境中的車輛目標,“人+玩具小車”組合模擬監測環境中的武裝人員。
實驗平臺同圖11類似,五個節點組成星型網絡,四個檢測節點布成方形陣列,彼此間隔為14 m×14 m(紅外傳感器節點對人員檢測距離為8 m~10 m,節點檢測范圍有重疊),主節點通過串口與計算機相連。
4.4.2 測試步驟
(1)紅外傳感器睡眠喚醒測試30次;
(2)聲音傳感器對三類目標分別進行30次測試;
(3)磁阻傳感器對三類目標分別進行30次測試;
(4)磁阻傳感器和聲音傳感器數據融合對三類目標分別進行30次測試。
4.4.3 測試結果及分析
(1)聲音傳感器對目標檢測測試結果記錄如表5~表7所示。

表5 聲音傳感器對車輛測試結果
檢測精度:86.7%;識別精度:86.7%

表6 聲音傳感器對武裝人員測試結果
檢測精度:83.3%;識別精度:武裝人員與普通行人無法區分。

表7 聲音傳感器對普通行人測試結果
檢測精度:80%;識別精度:武裝人員與普通行人無法區分。
(2)磁阻傳感器對目標檢測測試結果記錄如表8~表10所示。

表8 磁阻傳感器對車輛測試結果
檢測精度:93.3%;識別精度:車輛與武裝人員無法區分。

表9 磁阻傳感器對武裝人員測試結果
檢測精度:96.7%;識別精度:車輛與武裝人員無法區分。

表10 磁阻傳感器對普通行人測試結果
檢測精度:100%;識別精度:100%
特別說明:由于普通行人不具有磁場特征,因此磁阻傳感器無法對其進行檢測。但節點被喚醒后,認為確有三類目標進入監測區域,而車輛武裝人員均具有典型磁場特征,因此節點喚醒狀態下,如無磁場特征,則認為目標是普通行人。
(3)聲音與磁阻傳感器數據融合后對目標檢測測試結果表11~表13所示。

表11 多傳感器數據融合后對車輛測試結果
檢測精度:96.7%;識別精度:96.7%

表12 多傳感器數據融合后對武裝人員測試結果
檢測精度:93.3%;識別精度:93.3%

表13 多傳感器數據融合后對普通行人測試結果
檢測精度:90%;識別精度:90%
以上記錄了各種情況下的測試結果,并對各種情況下的檢測精度和識別精度做了計算。經過對比我們可以得出以下結論:
(1)經過數據融合對目標檢測和識別精度比用單個聲音傳感器對目標進行檢測與識別有了顯著提高,尤其是用單個聲音傳感器往往無法區分目標中的普通行人與武裝人員,而經過數據融合,可以得到較高的識別精度。
(2)經過數據融合后的檢測結果與用單個磁阻傳感器對目標的檢測相比,檢測精度變化不大,磁阻傳感器對鐵磁和非鐵磁物質有較好的區分度,但目標識別精度顯著提高。用磁阻傳感器往往對目標中的車輛與武裝人員無法區分。
(3)采用的數據融合方法簡單且有效可行,運用多傳感器數據融合技術可以獲得比單個、孤立的傳感器更加詳細而精確的結論。
5 結論
由于自身資源所限,采用非配合式無線傳感器網絡實現目標的檢測、識別與軌跡估計極具挑戰性。本文結合戰場目標偵測需求,設計和實現了適合于低成本與低功耗的非配合式無線傳感器網絡系統,利用“喚醒傳感器“設計了能量節省機制,采用簡單有效的算法利用多傳感器數據融合實現了實驗室條件下的目標檢測、識別與軌跡估計。實驗結果表明,該系統符合設計要求,目標檢測和識別精度高,并且可以實現目標運動軌跡的有效估計。
[1]Akyildiz I,Su W,Sankarasubramaniam Y,et al.A Survey on Sensor Networks[J].IEEE Communications Magazine,2002(8):102-114.
[2]孫利民,李建中,陳渝,等.無線傳感器網絡[M].清華大學出版社,2005.
[3]Arora A,Dutta P,Bapat S.A Line in the Sand:a Wireless Detection,Classification,and Tracking[J].Computer Networks:The Sensor Network for Target International Journal of Computer and Telecommunications Networking,200,446(5):605 -634,12.
[4]Tian He,Pascal Vicaire.Achieving Long-Term Surveillance in Vigilnet[C]//Proceedings of the INFOCOM 2006,2006.
[5]Gyula Simon,Miklds Mardti,Akos Ledeczi.Sensor Network-Based Countersniper System[C]//Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems,Batimore,MD,USA,2004:1 -12.
[6]高戰強.無線傳感器網絡中基于目標跟蹤的數據融合研究與實現[D].太原:太原理工大學,2008.
[7]申興發.基于無線傳感器網絡的分布式跟蹤系統[D].杭州:浙江大學,2007.
[8]楊宏斌.無線傳感器網絡軍事應用研究[J].艦船電子工程,2007,27(5):41 -43.
[9]劉博.無線傳感器網絡中的目標跟蹤技術[J].中興通訊技術,2008,14(1):48 -53.
[10]Zhao F,Shin J,Reich J.Information-Driven Dynamic Sensor Collaboration for Tracking Application[J].IEEE Signal Processing Magazine,March 2002.
[11]Prabal K D.On Random Event Detection with Wireless Sensor Networks[D].USA:The Ohio State University,2004.
[12]康嫩紅.數據融合理論與應用[M].西安電子科技大學出版社,西安,2006.
[13]Mechitov K,Sundresh S,Kwon Y,et al.Cooperative Tracking with Binary-Detection Sensor Networks[C]//Proceeding 1st Int.Conf.on Embedded Networked Sensor System(SenSys03),Los Angeles,CA,November 5 -7,2003.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
無線電工程(2020年11期)2020-10-29 01:25:46