無人機機載導彈落角和時間控制導引律研究①
2011-05-03 08:29:18胡凱明文立華
固體火箭技術 2011年4期
胡凱明,文立華
(西北工業大學航天學院,西安 710072)
0 引言
在未來信息化局部戰爭中,作為網絡中心戰重要節點和打擊平臺的各類無人機,可居高臨下快速發現、跟蹤、打擊各類動靜態目標,無人機機載導彈也應運而生。由于無人機本身質量和尺寸的限制,無人機機載導彈一般尺寸和質量也較小,一般射程在10 km以內,作為對地對海武器可攻擊地面或海上固定或低速運動目標,作為空-空彈可攻擊無人機、直升機。無人機導彈攻擊地面海上固定或低速運動目標時,在保證高精度的同時,不但希望命中角接近垂直,以達到最大的毀傷效果,而且希望盡可能地縮短飛行軌跡時間,以增加突防能力。對于一些有較強防空能力的目標,需多枚導彈同時攻擊目標,才能使目標的防空能力不足以攔截所有來襲導彈。具有終端角度約束導引律的研究已有30多年歷史,而近幾年來,各國學者又加入了對命中飛行時間的控制。
文獻[1]從最優控制的角度,研究了反艦導彈的命中時間控制問題。文獻[2]用剩余時間多項式的形式,推導了導彈的狀態方程,得到了一種控制命中角的最優導引律,并給出了較為實用且可靠的剩余時間估計方法。文獻[3]對于反艦導彈結合了命中時間和落角的控制,給出了較為簡單實用的既控制時間又控制角度的導引方法。
本文主要研究將文獻[3]的導引律結合文獻[2]的剩余時間估計方法,用于無人機機載小型空-地導彈制導,使命中時間更為精確,隨后進行了數值仿真,并將文獻[4]給出的電視制導無人機導引律舍去框架角約束和本文導引律進行了比較分析。
1 無人機導彈運動學模型
以目標和導彈質心為基準,將導彈與目標相對運動分解為俯沖平面和轉彎平面內的運動。俯沖平面定義為導彈質心和目標及地心所確定的平面,轉彎平面定義為過目標和導彈質心并垂直于俯沖平面的平面。
圖1中,θ、θf為導彈速度傾角及其預定末端速度傾角;η=θ-qy,ηf=θf-qy為導彈速度矢量與視線間的夾角及其預定末端夾角;r為導彈與目標之間距離;qy為導彈與目標的高低視線角;vm為導彈速度,由于目標相對于導彈速度很小,可視為固定;ac為加速度指令,并假定導引頭對目標的跟蹤是理想的,也就是沒有時間延遲。
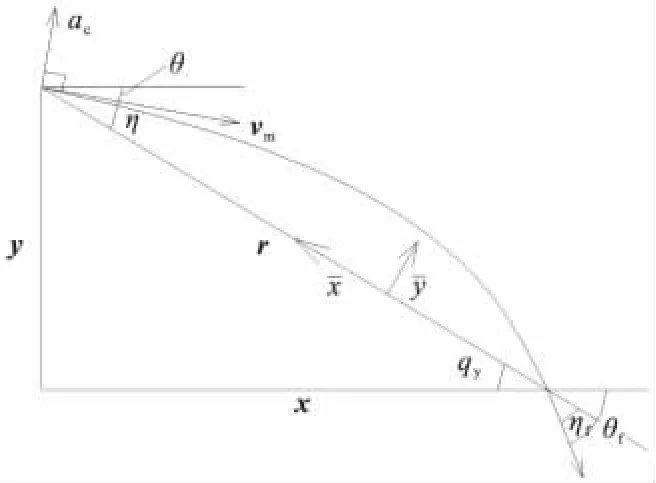
圖1 無人機導彈末制導俯沖平面幾何關系Fig.1 UAVsmounted m issile term inal-guidance dive geometry
定義此時θ為負,則η在圖1所示情況下為正,反之為負。由圖1及相對運動學關系可得到:

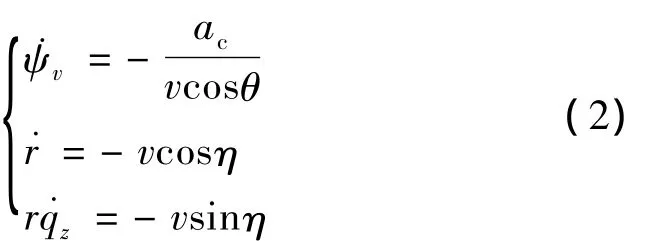
對于轉彎平面內的運動學模型與俯沖平面內的類似,定義此時彈道偏角 ψv為負,則 η=90°-qz+ψv。由圖2及相對運動學關系可得:
為簡單起見,又能說明問題,本文采用空間三維的質點動力學彈道方程,這樣就避免了姿態角為90°時而用四元素法。

圖2 無人機導彈末制導轉彎平面幾何關系Fig.2 UAVsmounted m issile term inal-guidance turn geometry
2 俯沖平面內修正比例導引律
2.1 控制命中角導引律
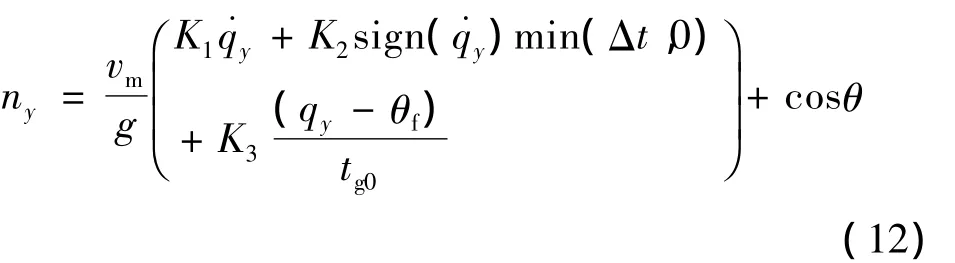
命中角是指導彈速度方向和目標速度方向的夾角,由于本文假設目標為地面固定目標,故命中角在這里就是指導彈命中時的彈道傾角θ。本文采用文獻[3]根據帶有末端約束的最優控制理論得到的控制命中角的導引律:

式中tg0為剩余時間,預定末端落角θf=-90°。
2.2 控制攻擊時間導引律
預估命中時間是指當前時間和抵達目標剩余時間之和[2]。

為實現控制命中時間,需在常規的比例導引律中引入控制命中時間修正量:

當控制修正量為正時,說明預估命中時間大于期望命中時間,此時應使導彈按照比例導引律飛向目標,也就是這種情況下,時間控制項等于零;當控制修正量為負時,說明預估命中時間小于期望命中時間,則應在導彈的飛控指令中加入和當前指令相反的量,也就是向當前彈道曲率相反的方向飛行,來增加飛行時間,從而控制導彈飛行時間[3]。于是,得到控制攻擊時間導引律:
這里需說明的是選取期望命中時間時,要大于最小命中時間,本文近似認為比例導引律的命中時間為最小命中時間。
2.3 剩余時間估計
精確的剩余時間估計十分重要,本文采用了2種時間估計方法,在縱向有角度約束的情況下引用文獻[2]的方法,在橫側向僅有時間約束的情況下引用文獻[3]的方法。如圖1定義,利用ˉx和ˉy及η和ηf推導剩余時間估計公式。


由以上幾式可解得:

剩余時間可用彈目相對距離除以速度在彈目視線角上的投影在相對距離上的平均速度來近似表示[2]:

最終得到剩余時間略去高階項的表達式:

橫側向的剩余時間估計因為不考慮命中角約束,則采用彈目相對距離除以導彈速度在彈目視線角上的投影來估計:

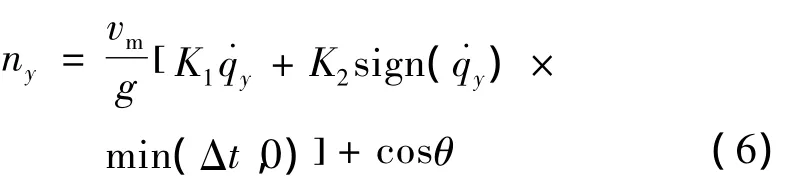
2.4 同時考慮命中角和攻擊時間的導引律
結合命中角和攻擊時間兩方面因素,得到帶有命中角約束和時間控制俯沖平面內的修正比例導引律:
3 轉彎平面內修正比例導引律
由于轉彎平面內僅考慮攻擊時間控制,則取消俯沖平面內的命中角控制項,即可得到帶有時間控制轉彎平面內的修正比例導引律:

4 導引律數值仿真
通過將本文導引律用于無人機機載小型空-地導彈的導引系統來證明其優越性能,以下就2種情況進行數值仿真。
(1)情況一
對于僅控制命中角的修正比例導引律,如將文獻[4]舍去框架角約束的導引律(簡稱文獻[4]導引律)

需要較大的飛行時間,降低了導彈的突防能力,而運用本文導引律,可使飛行時間tf略大于比例導引法的飛行時間,從而在保證命中角約束要求的同時,相比式(14)導引律,能較大地縮短飛行時間,增強了導彈的突防能力。
無人機從坐標(0,1 000,0)以速度vm=100m/s向正X方向飛行,目標位置在(2 600,0,1 000),單位m。比例導引律時間為t=11.15 s,則根據上面的原則,取導彈飛行時間為tf=12.5 s,導彈的初始條件為

本文的導引律的各項比例系數取:

不同導引律仿真對比結果見表1。不同導引律仿真彈道對比見圖3,2種導引律過載對比見圖4,改進前后剩余時間對比見圖5。
從仿真結果可看到,由于命中角約束項型式的不同,使得本文導引律飛行時間大大低于文獻[4]中的命中角約束導引律的飛行時間,而比比例導引律的飛行時間稍大,從而增大了導彈突防概率,而且命中角也略有增大。加入了考慮命中角約束的剩余時間估計方法的時間控制項,使得剩余時間估計和理想剩余時間線幾乎重合。因此,飛行時間控制得也較準確。
但從圖4可看到,本文導引律在飛行末端指令過載變化增大,這給控制系統提出了較高要求,在實際應用中,可通過調節無人機小型導彈的操穩性來滿足20g的過載要求。

表1 不同導引律仿真對比結果Table 1 Comparison of guidance laws simulation results
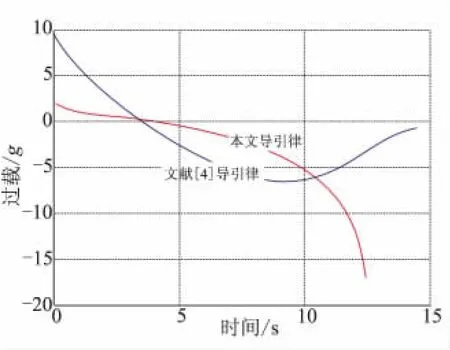
圖4 2種導引律過載對比Fig.4 Comparison of guidance laws overload

圖5 改進前后剩余時間對比Fig.5 Com parison of time-to-go estimation
(2)情況二
要求單架無人機從不同地點、不同時刻發射多枚導彈,要求同時到達目標。確定各期望命中時間tf時,必須大于在各個距離上最小飛行時間。無人機從坐標(0,1 000,0)以速度vm=100 m/s沿正X方向飛行,目標位置在(2 600,0,1 000),單位m。無人機每隔2 s發射1枚導彈,共發射3枚,要求在第1枚發射后15 s所有導彈都命中目標,也就是要求每枚導彈飛行時間分別為tf=11、13、15 s,導彈初始條件和導引律的各項比例系數的取值與情況一相同。
情況二仿真結果見表2。情況二仿真彈道見圖6,情況二過載見圖7,情況二剩余時間估計比較見圖8。
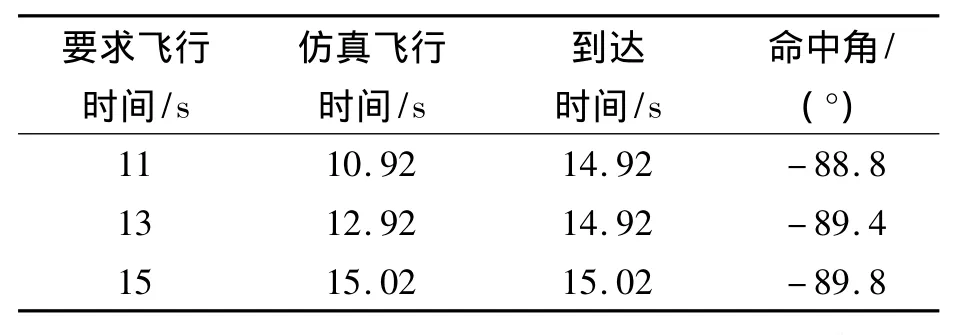
表2 情況二仿真結果Table 2 Simulation results of case 2
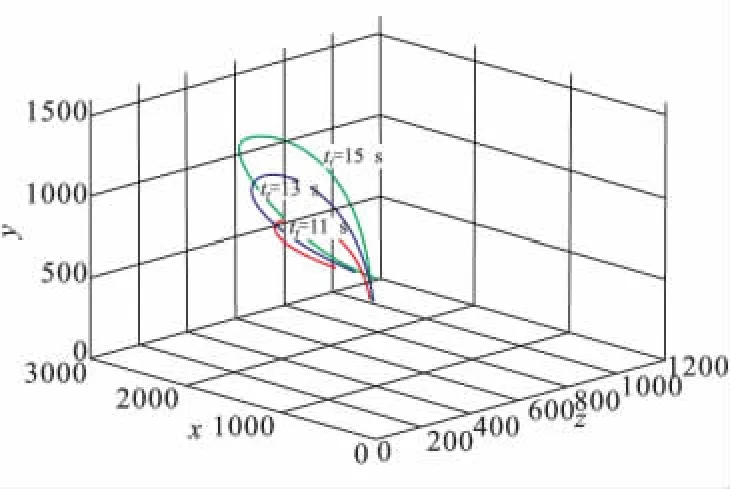
圖6 情況二仿真彈道Fig.6 Trajectories of case 2
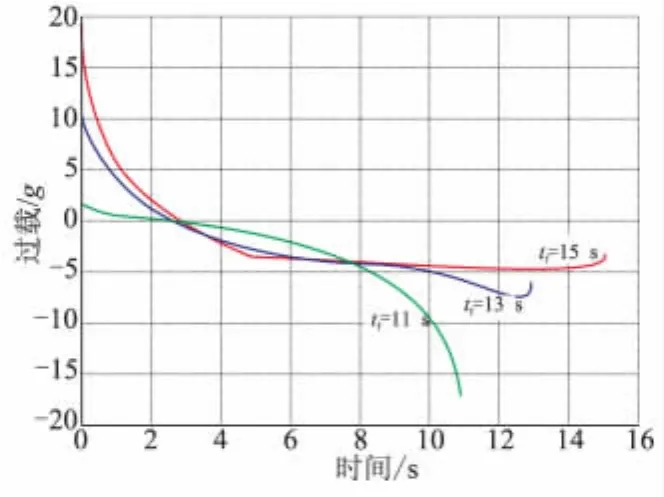
圖7 情況二過載Fig.7 Overload of case 2
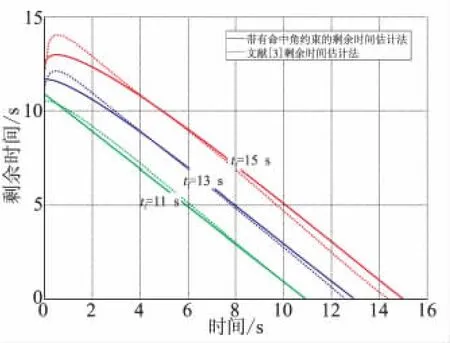
圖8 情況二剩余時間估計比較Fig.8 Com parison of tim e-to-go estimate of case 2
從仿真結果可知,當時間為15 s時,比在此位置比例導引法的需用時間大得多,彈道會有較大的上升過程,因此此時的初始過載就較大。隨著時間接近比例導引法的需用時間,彈道的上升過程縮短,初始過載隨之變小,末端過載隨之加大,所以確定期望命中時間時,也要考慮導彈可用過載的限制;命中角也幾乎控制為-90°,可實現攻頂;剩余時間也幾乎成線性,表明采用的剩余時間估計方法較有效;可看出,考慮了命中角約束的剩余時間估計法,比文獻[3]中的估計方法更適合同時帶有命中角約束的導引方法。隨著期望命中時間的增加,在該方法控制下的導彈飛行時間更接近期望命中時間,可較準確地保證3枚導彈同時到達目標。
5 結束語
仿真結果證明,通過加入了考慮了命中角約束的剩余時間估計方法,使在這種控制命中角和命中時間的修正比例導引律導引下的無人機機載小型導彈,以更為準確的命中時間、接近垂直的命中角,命中地面或海面的固定或低速運動目標。
[1] Jeon IS,Lee J I and Tahk M J.Impact-time-control guidance law for anti-ship missiles[J].IEEE Transactions on Control Systems Technology,2006,14(2):260-266.
[2] Ryoo C K,Cho H Jand Tahk M J.Closed-form solutions of optimal guidance with terminal impactangle constraint[C]//The IEEE Int'l Conference on Control Application,June 23-25,2003.
[3] Jung B Y,Kim Y D.Guidance laws for anti-shipmissiles using impact angle and impact time[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit,Keystone,Colorado,USA,August21-24,2006.
[4] 楊俊鵬,祝小平,周洲.電視制導無人機導引律研究[J].西北工業大學學報,2005,23(4):479-482.