TK算法在GPS中的新應用
2011-04-27 07:26:20劉德榮楊東凱李明里
全球定位系統 2011年3期
關鍵詞:信號
劉德榮,楊東凱,李明里,黃 毅
(北京航空航天大學電子信息工程學院,北京100191)
0 引 言
在通信領域中總是存在多徑效應,多徑效應也是引起GPS定位精度的主要誤差之一,在傳統的GPS接收機中,延遲大于一個碼片的多徑信號可以通過擴頻機制來抑制掉,進而減小多徑信號對直射信號的影響;而延遲小于一個碼片的多徑信號所帶來的影響非常有限,通常忽略其對GPS接收機的影響[1]。隨著科技的進步,多徑信號得到了利用,GNSS-R(Global Navigation Satellite System-Reflection)遙感技術[2]的出現有力地證明了多徑信號的可用性。
多徑估計的算法很多,像最大似然估計、信道沖激響應估計模型等,其中TK算法最簡便。在傳統的利用TK算法的GPS接收機中,首先利用TK算法估計出多徑信號的延遲,進而從接收信號中把多徑信號去掉。這種方法只是對多徑信號進行了抑制,沒有充分利用信號資源。
我們重點介紹TK算法及在GPS中的新應用。
1 TK算法
TK算法最初是被用來測量一個系統的物理能量[3],一個產生簡單振蕩信號系統的能量可以通過所產生信號振幅和頻率計算得到。


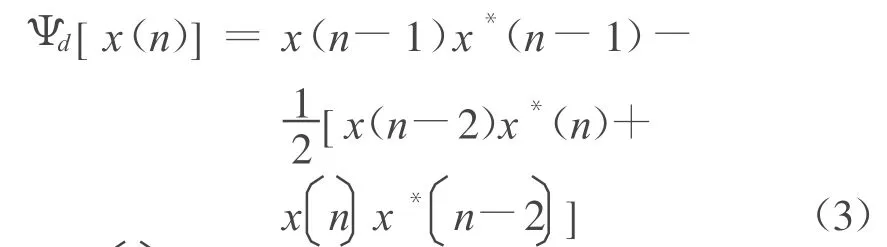

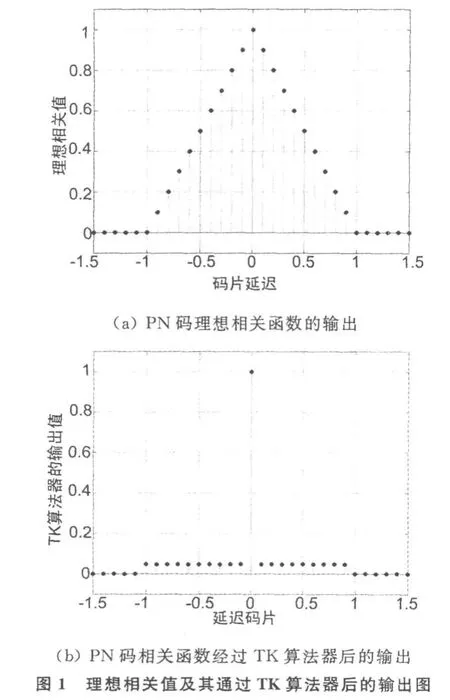
在GPS中,PN碼的相關函數為三角波形,表示為

上式中Tc為PN碼片寬度。式(5)通過TK算法器后,得到式(6)

2 TK算法應用
在GPS中,非線性TK算法適用于接收信號和本地合成信號的互相關函數,即從互相關函數通過T K算法器后的結果中,可以估算出多徑信號(為了方便討論,假定只有一路反射信號)相當于直射信號的延遲。
相關器具有一個線性的過程,接收機接收到的信號里面除了直射信號外,還含有不同延遲的多徑信號,所以,當直射信號不同延遲的多徑信號同時到達接收機時,它們與本地載波進行相關運算,所得到的結果可以看成每路信號與本地載波相關運算值的疊加。接收機接收到的信號與本地產生的碼進行相關運算的結果可以表示為

這里的ai,ti,θi是第i路徑的幅度、延遲和相位。通過TK算法器后,得到下式[5]:
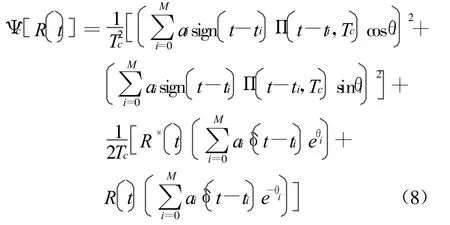
由式(8)可以看出,TK運算器輸出值在t=ti輸出一個很大的值,這里的ti為時間延時。根據不同的ti之間的距離,TK算法能夠估計出反射信號相對于直射信號的延遲碼片長度。如圖2所示,圖2(a)中虛線代表直射信號與本地碼的相關功率曲線,點線代表多徑信號(假定只有一路反射信號)與本地碼相關功率的曲線,實線代表兩個功率之和的曲線。圖2(b)為圖2(a)中實線表示的信號(即直射信號與本地碼的互相關功率和反射信號與本地碼的互相關功率之和)通過TK算法器后產生的圖,位于零點的高脈沖為直射信號的相關功率經過T K算法器后所產生,另外一個小脈沖即為一反射信號的相關功率信號經過 TK算法器后所產生。兩脈沖之間的距離即為反射信號相對于直射信號的延遲[5]。
用TK算法估算出多徑信號相對于直射信號的延遲后,使直射信號延遲一定的碼片與多徑信號的碼片對齊疊加,進而提高了相關功率和載噪比。
接收機接收到的信號經過射頻前端處理后進入碼跟蹤環路,直射信號即時相關器的輸出為[5]
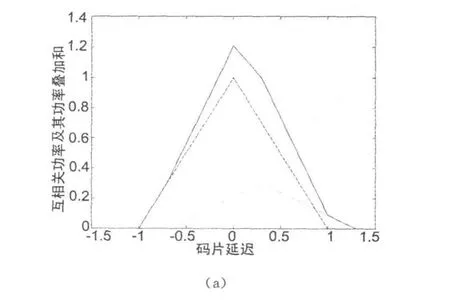

圖2 相關功率及其通過TK算法器得到的圖形
反射信號即時相關器的輸出為
式中:A為即時[6]相關器輸出信號的幅度;是粗捕獲碼(C/A)碼的自相關函數;ψ為在直射信號和估計載波相位之間的誤差;α為直射信號和反射信號的幅度的比率,Δτm為延遲;β是相位延遲。
經過增強后的直射信號經過即時相關器輸出為

由式(9)、(10)、(11)可知,即時[6]相關器輸出的經過疊加后的信號的功率明顯比直射信號的功率大。
抽樣信號在即時相關器的輸出可以寫成[7]:


故載噪比(C/N)可表示為

這里的Beqn是系統結構的等價噪聲帶寬,在理想碼延遲和載波跟蹤狀態下和C/No可用信號噪聲變化公式得到,公式如下:
這里的rc為直射信號下相關器的輸出值;rcRe為增強信號通過相關器時,相關器的輸出值;Pd為信號功率;Ptot為噪聲功率;N為計算過程中相關器的個數。
3 實驗結果與分析
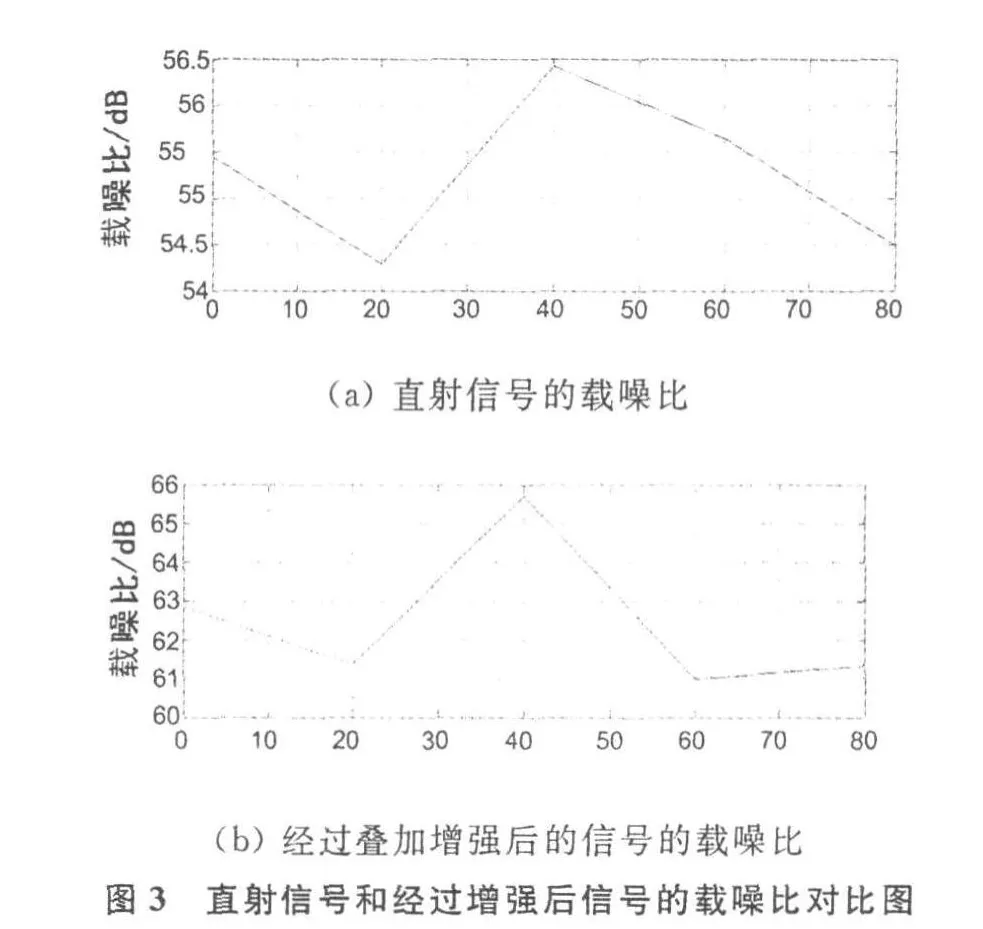
為了驗證通過TK算法估計出GPS多徑信號相對于直射信號的延遲后,直射信號經過相應延遲后與反射信號進行疊加,進而達到反射信號增強直射信號,提高了信號載噪比的目的。在matlab中進行了仿真,仿真出了直射信號的載噪比和經過增強后的信號的載噪比,如圖3所示,橫坐標取的時間長度為80 s,縱坐標為載噪比,顯然經過疊加增強后信號的載噪比比直射信號的載噪比大。
4 結 論
介紹了T K算法,用TK算法估算出GPS反射信號相對于直射信號的延遲,并且在此基礎上,GPS直射信號進行一定的延遲后與反射信號進行疊加,進而起到GPS反射信號增強直射信號,提高了信號的載噪比的作用。并通過仿真驗證了這一算法和結論。下一步將重點研究在實際信號狀態下,提高T K算法估算出GPS反射信號相對于直射信號的延遲精度,以及估算出通過這種方法GPS反射信號增強直射信號的程度。
致謝:感謝留學生瑞茲萬為本文撰寫提供的幫助!
[1] 李德屹,田文斌,田紀心.一種新的GPS多徑抑制方法[J].無線電工程,2008,38(8):25-26.
[2] 張益強,楊東凱,張其善.GPS海面散射信號探測技術研究[J].電子與信息學報,2006,2(6):1091-1094.
[3] Kaiser J F.On a simple algorithm to calculate the energy of a signal[C]//in proceedings of IEEE ICASSP-90,Albuquerque,New Mexico,1990:381-384.
[4] Hamila R,Lohan E S,Renfors M.Novel technique for multipath delay estimation in GPS receivers[C]//in Proceedings of International Conference on Third Generation Wireless and Beyond(3GWireless'01),San Francisco,Calif,USA,2001:993-998.
[5] Liu Li-yu,Amin M G.Tracking performance and average error analysis of GPS discriminators in multipath[J].Signal Processing,2009(89):1224-1239.
[6] 楊東凱,張飛舟,張 波.軟件定義的GPS和伽利略接收機[M].北京:國防工業出版社,2009:86-88.
[7] Kamran R S.GPS closely-spaced multipath delay estimation using teager-kaiser operator[D].Beijing U-niversity of Aeronautics and Astronautics,2011.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
