基于二級信息融合的裝備故障診斷方法
2011-04-26 02:31:12趙雙龍郝永生
中國測試 2011年3期
趙雙龍,郝永生
(軍械工程學院導彈工程系,河北 石家莊 050003)
0 引 言
在裝備故障診斷領域,國內外學者在研究采用諸如神經網絡[1-2]、模糊理論[3]、專家知識[4-5]等技術方法,取得了一定的進展。應用這些方法在故障診斷方面雖然都有一定的優勢,但采用單一的診斷模式對武器裝備進行故障診斷時,總會存在推理能力弱、出現匹配沖突、容錯能力差的缺點[6-8],所以僅僅單憑某一個方法就主觀地下結論容易導致誤判或漏判。針對武器裝備故障診斷的多故障問題,提出綜合利用證據理論與神經網絡的優點,組成二級信息融合故障診斷模型,綜合診斷武器裝備故障。
1 數據級融合方法(RBF神經網絡)
徑向基函數神經網絡的網絡拓撲結構圖如圖1所示。

圖1 RBF神經網絡的拓撲結構
該網絡各層含義如下:
第1層為輸入層。輸入層神經元只起連接作用,不進行信號變換。
第2層為隱含層。設輸入層第i個神經元至隱含層第j個神經元的連接系數為

輸入層神經元至隱含層第j個神經元的鏈接系數矢量,也即隱含層第j個神經元中心矢量為

第3層為輸出層。設隱含層第j個神經元至輸出層第k個連接系數為

徑向基對應輸入為X的輸出Y為
式中:θk(1≤k≤O)——輸出層第k個神經元的閥值。
2 特征級融合方法(DS證據理論)
2.1 故障診斷中的識別框架
對某一判別問題,所能認識到的所有可能的結果的集合用Θ表示,Shafer稱其為識別框架(frame of discernment)。
在故障診斷問題中,每種可能的故障都為假設,各種可能故障的集合為識別框架,故障的每一癥狀下測得的數據為證據。
2.2 故障診斷中的基本概率分配函數
給定一個識別框架Θ,如果集函數m:2θ→[0,1],滿足

則稱m為框架Θ上的基本可信分配,?A?Θ,m(A)稱為A的基本可信數(basic probability number)[9]。
在診斷問題中,每種癥狀下各種可能故障都有一定的發生概率,每種癥狀下所有可能故障發生的概率分布為該癥狀的基本概率分配函數。
2.3 信任函數
設 Θ 是一個識別框架,集函數 Bel:2θ→[0,1]是信任函數,當且僅當它滿足:
(1)Bel(φ)=0,Bel(Θ)=1對Θ的冪集2θ中的任意元素X有0≤Bel≤1。
(2)任意集合 X1,X2,…,XY∈2θ,且

圖2 二級信息融合模型結構圖
3 二級融合模型設計
為充分利用神經網絡的自學習能力和證據理論處理不確定性能力,提出基于證據理論與神經網絡相結合的二級故障診斷模型,其結構圖如圖2所示。
此二級信息融合模型主要將RBF神經網絡作為證據理論中的初始概率賦值的獲取途徑,以其自學習能力的優點將每組n個故障原始數據轉化為一條證據中的m個不同賦值,此為第一層數據級融合。而后對各證據進行沖突證據處理,經過處理后的證據由DS組合規則進行第二層特征級融合,最終由診斷決策規則確定故障部位。以下是模型實現及設計過程。
3.1 確定故障空間,構造識別框架
在查閱診斷目標系統故障歷史紀錄的基礎上,統計曾經發生過的故障情況;然后,把這些故障情況根據其原因和特點歸結為若干典型故障類型。由這些典型故障類型構成“故障空間”即“識別框架”。
3.2 確定神經網絡結構
3.2.1 RBF神經網絡層數的確定
選取由三層節點組成的RBF神經網絡,網絡由一個輸入層,一個非線性隱層和一個線性輸出層組成。
3.2.2 傳遞函數的選擇
常用的徑向基函數有以下3種形式[10]
上面這些函數都是徑向對稱的,但最常用的是高斯函數其具體形式為
式中:x——n維輸入向量;
ti——第i個基函數的中心,與x具有相同維數的向量。
實際上只有當Ri(x)大于某一數值時才對相應的權值進行調整。經這樣處理后,RBF網絡也同樣具備局部逼近網絡學習收斂快的優點。同時這樣近似處理,可以在一定程度上克服高斯基函數不具備緊密性的缺點。
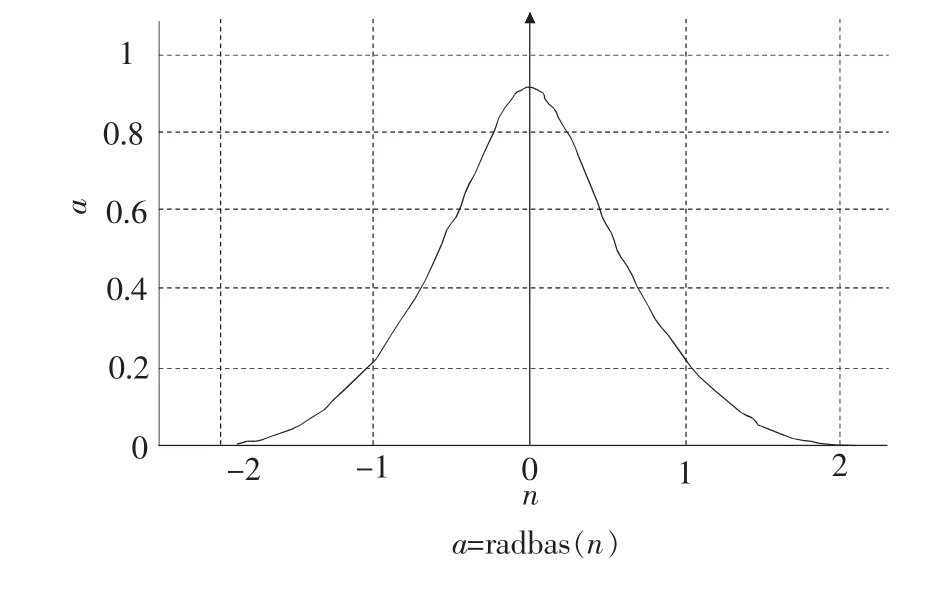
圖3 徑向對稱高斯函數
徑向基對稱高斯函數如圖3所示,由圖3可以看出,RBF神經元的輸出a隨著n(X和W之間向量距離)的減小而增大。可以認為W是一個聚類中心,只有當輸入向量落入RBF神經元聚類中心附近的一定區域內(闡值b),才能使該神經元的傳遞函數產生較大的輸出。
選用RBF網絡中最常用的高斯函數作為隱含層傳遞函數,采用線性傳遞函數作為輸出層傳遞函數。
3.2.3 網絡輸入輸出節點數的確定
由于RBF網絡的訓練目的與BP網絡相同,都是為了識別且比較出裝備的內部故障狀態與非故障狀態,因此輸入節點為所能采集到的反映裝備特征的數據個數,輸出節點數為裝備故障種類數加上不確定度。
3.2.4 隱層節點數的確定
在Matlab環境下進行仿真試驗時,網絡的隱層節點數可以在訓練中自動獲得最佳值,不必事先給定。這一點大大優于BP網絡,減小了人的主觀性,使訓練結果更加接近最優值。此時默認的最大隱層節點數為輸入輸出樣本對的個數,但可以通過設置訓練達到的準確度來控制節點數的增加。
3.3 選擇證據體,訓練神經網絡,確定各證據的基本可信度分配
利用故障特征子集,結合識別框架中的各命題的特點,構造從不同側面能夠識別“診斷對象信息系統”運行狀態的證據體。選擇幾組典型數據對設計好的RBF神經網絡進行訓練,之后由訓練好的神經網絡來獲取各證據的基本可信度分配。
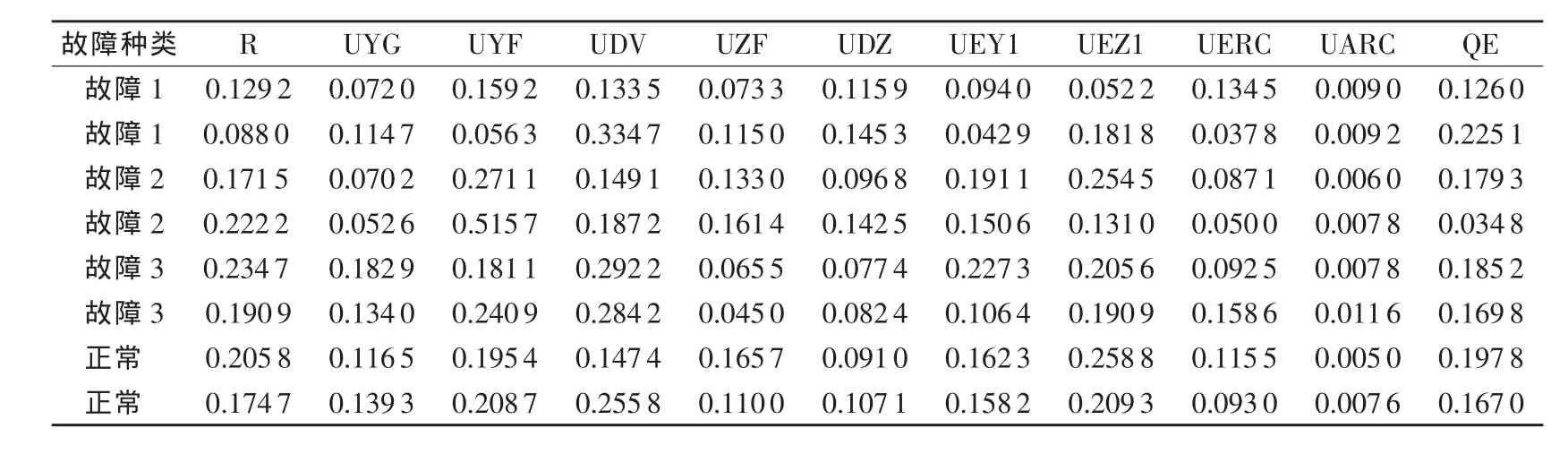
表1 二級融合模型訓練數據

表2 制導電子箱測試數據
3.4 DS規則組合各證據,得出診斷結論
由DS組合規則對各證據體進行特征級融合,而后由診斷決策規則得出診斷結論。
4 實例驗證
以某型導彈制導電子箱故障診斷為例,經過分析確定其故障空間為故障1、故障2、故障3、正常4種狀態。神經網絡由三層節點組成,其中輸入層節點數為輸入數據個數11,輸出層節點數為故障種類數為5,采取其3個典型故障和正常狀態下的數據各2組如表1所示,來訓練神經網絡。
取3組檢測數據,通過二級信息融合模型來進行故障診斷,檢測數據如表2所示。
表3為檢測數據經神經網絡數據級融合確定的對各狀態的基本可信度分配。

表3 各故障基本概率賦值
二級融合模型對檢測數據進行診斷后確定的最終結果如表4所示,可見基本可信度分配中的不確定度經過DS證據理論融合后明顯減小,概率向可能性較大的一方面傾斜。
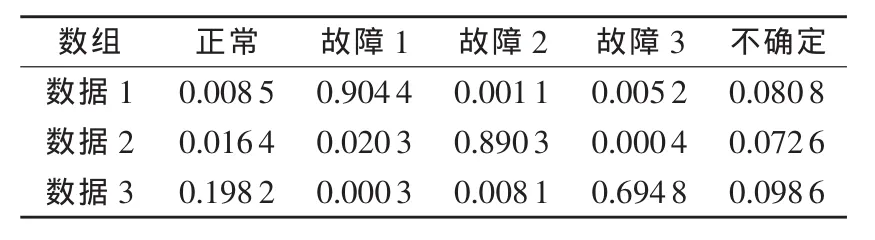
表4 二級融合結果
5 結束語
該文通過對RBF神經網絡和DS證據理論融合方法進行研究,提出了以RBF神經網絡為數據級融合,以DS證據理論為特征級融合的二級信息融合故障診斷模型,給出了模型實現步驟,并以某型導彈制導電子箱故障診斷為例進行了實驗驗證。實驗證明此法能融合神經網絡與證據理論的優點,提高了故障診斷準確度。
[1] 丁函,劉青.神經網絡與信息融合技術在內燃機車故障診斷中的應用[J].現代電子技術,2008(23):184-187,191.
[2] 任安虎,張燕,張亮.數據融合技術在車牌字符識別中的應用研究[J].電子設計工程,2010,18(8):33-35.
[3] 何友,王國宏.多傳感器信息融合及應用[M].北京:電子工業出版社,2000.
[4] 巨永鋒,包旭,蔡占華,等.基于神經網絡與專家系統的壓路機智能故障診斷[J].現代電子技術,2005(19):80-84.
[5] 張冀.基于多源信息融合的傳感器診斷方法研究[D].北京:華北電力大學,2008.
[6] 喻俊馨,王計生,黃惟公.基于神經網絡和支持向量機的故障診斷[J].西華大學學報:自然科學版,2008,27(3):24-27.
[7] 馬國清,趙亮,李鵬.基于Dempster-Shafer證據推理的多傳感器信息融合技術及應用[J].現代電子技術,2003(19):41-44.
[8] 郭潤龍.基于RBF神經網絡與D-S證據理論的數據融合方法及應用研究[D].長春:東北林業大學,2009.
[9] Cappelle C,Pomorski D,Yang Y.GPS/INS data fusion for land vehicle localization[J].IMACS Multiconference on Computational Engineering in System Applications,2006,10(1):4-6.
[10]鄒永祥.基于神經網絡的信息融合技術與應用[D].成都:成都理工大學,2008.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
