數(shù)控機床大推力永磁同步直線電機控制方法
2011-04-23 10:13:00王瀟
電子科技 2011年6期
關(guān)鍵詞:系統(tǒng)
王 瀟
(北京信息科技大學機電工程學院,北京 100192)
傳統(tǒng)的傳動機構(gòu)如齒輪、蝸輪、皮帶、絲杠、滾珠絲杠、聯(lián)軸器、離合器等中間傳動機構(gòu),容易產(chǎn)生很多如:較大的轉(zhuǎn)動慣量、彈性形變、反向間隙、摩擦、振動、磨損等問題,所以不僅減小了傳動效率,而且還增加了成本,降低了系統(tǒng)的可靠性。雖然這些傳動機構(gòu)性能已經(jīng)得到了改善,但是其間接傳動的本質(zhì)不能從根本上解決。于是“直接驅(qū)動”概念應(yīng)運而生,直接驅(qū)動是指不使用任何中間傳動機構(gòu),直接將動力源與負載相連進行驅(qū)動。這種傳動具有結(jié)構(gòu)簡單、動態(tài)響應(yīng)快、速度和加速度大、精度高、振動和噪聲小等優(yōu)點。
直線電機就是直接驅(qū)動的裝置,其中控制技術(shù)是直線電動機設(shè)計和應(yīng)用的重點。PID調(diào)節(jié)是最早出現(xiàn)的一種自動控制方法,控制簡單而且效果顯著。尤其是在高精度運動控制中,運用多閉環(huán)控制已經(jīng)越來越廣泛,伺服系統(tǒng)一般是三環(huán)系統(tǒng),外環(huán)為位置環(huán),內(nèi)環(huán)依次為速度環(huán)、電流環(huán)。電機三環(huán)控制框圖如圖1所示。但是傳統(tǒng)的PID控制算法不能對摩擦力、負載擾動等外界干擾及時消除,直線電機對負載擾動、摩擦力敏感,極易產(chǎn)生較大的穩(wěn)態(tài)誤差,降低了控制精度。基于以上問題,提出抗干擾較強的PID+前饋算法,并用實驗驗證這種控制方法可以提高控制精度[1-2]。
1 直線電機運動控制原理
直線電機進給機構(gòu)采用閉環(huán)控制,使用Renishaw高精度直線光柵尺作為位置反饋元件,安裝于電機平臺底部,與平臺固定為一體,由于沒有與電機直接接觸,不會對直線電機運動產(chǎn)生磨擦力。光柵反饋信號首先進入放大器編碼器輸入端口,并由放大器的等量輸出端口反饋到PMAC卡,組成雙閉環(huán)反饋,根據(jù)光柵尺反饋的脈沖信號即可計算直線電機當前位置,由控制器的PID調(diào)節(jié)器根據(jù)目標位移與實際位移的差值自動調(diào)節(jié)電機的控制參數(shù),完成所需的進給。閉環(huán)控制原理,如圖5所示[3]。
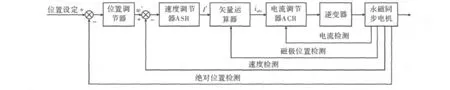
圖1 三環(huán)伺服系統(tǒng)控制框圖
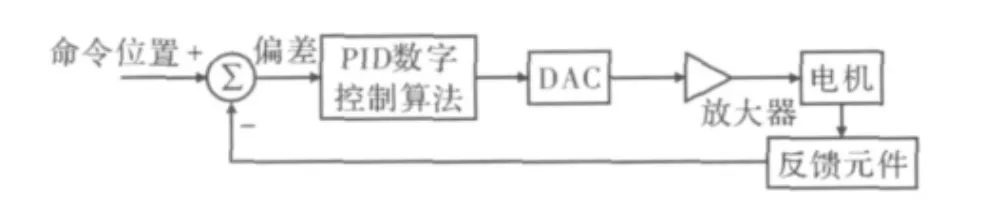
圖2 閉環(huán)控制原理圖
PMAC控制的直線電機伺服系統(tǒng)是一個高速動態(tài)系統(tǒng),復雜的控制算法無法在如此短的時間內(nèi)完成伺服計算,所應(yīng)該采用計算量比較小的伺服算法。傳統(tǒng)的PID環(huán)節(jié)是偏差控制器,被控制量需要偏離設(shè)定值才能通過偏差進行控制,存在一定的滯后性;由于系統(tǒng)受到擾動,再加上系統(tǒng)本身結(jié)構(gòu)和參數(shù)的變化而產(chǎn)生的誤差,不能在閉環(huán)系統(tǒng)中消除,所以需要對系統(tǒng)進行補償,抵消擾動對系統(tǒng)的影響,即所謂的擾動補償。控制框圖如圖6所示[4]。

圖3 帶前饋補償PID閉環(huán)控制
圖3為帶前饋的控制結(jié)構(gòu)框圖,其中,R(s)為系統(tǒng)輸入;E(s)為系統(tǒng)誤差;C(s)為系統(tǒng)的輸出;G(s)為PID控制器傳遞函數(shù);Gp(s)為被控對象的傳遞函數(shù);F(s)為前饋環(huán)節(jié)的傳遞函數(shù)。得出帶前饋的系統(tǒng)誤差傳遞函數(shù)

式(1)說明,當前饋函數(shù)滿足F(s)=Gp(s)-1時,誤差函數(shù)為0,則C(s)=R(s)。說明無論輸入信號如何變化,系統(tǒng)的誤差始終為0。前饋補償比只按誤差控制的閉環(huán)系統(tǒng)效果好。通常前饋微分階次為2時即可獲得滿意的控制效果。
PMAC在傳統(tǒng)PID控制算法的基礎(chǔ)上增加了速度和加速度的前饋控制,其中,速度前饋用于減小由于微分增益的引入所引起的跟隨誤差,加速度前饋用于減小系統(tǒng)慣性所帶來的跟隨誤差。PMAC嵌入的PID和前饋控制的控制算法如圖4所示[5]。
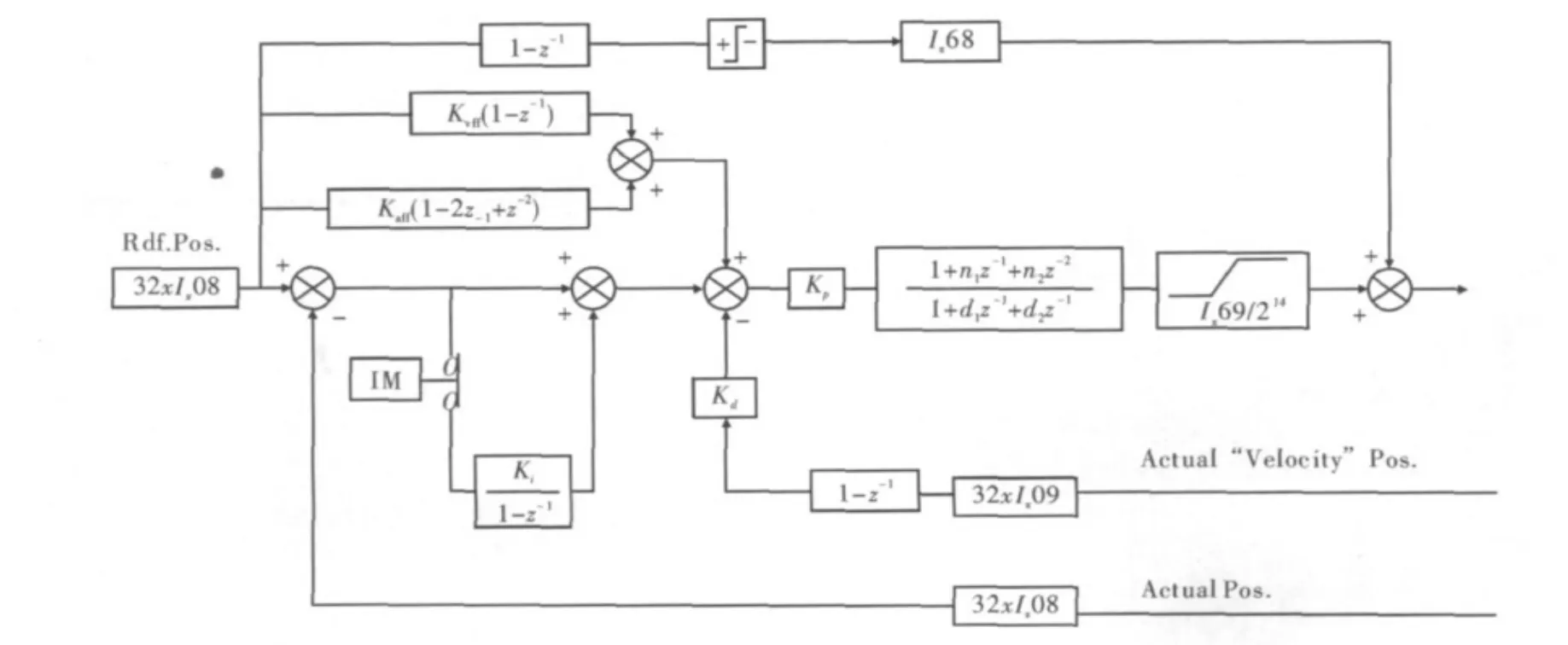
圖4 PMAC算法控制框圖
圖4中,Kp比例增益,為系統(tǒng)提供剛度;Kd微分增益,提供系統(tǒng)穩(wěn)定需要的阻尼;Kvff速度前饋增益,減小因阻尼引起的跟隨誤差;Ki積分增益消除穩(wěn)態(tài)誤差;Kaff加速度前饋增益減小系統(tǒng)慣性帶來的跟隨誤差。
其控制算法的實際公式如下

其中,DACout(n)為16位的伺服周期輸出命令轉(zhuǎn)換成-10~+10 V;Ix08為電機x的一個內(nèi)部位置放大系數(shù);Ix09為電機 x速度環(huán)的一個內(nèi)部放大系數(shù);FE(n)是伺服周期n內(nèi)所得的跟隨誤差,即為該周期內(nèi)命令位置和實際位置的差值;AV(n)是伺服周期n內(nèi)的實際速度,即為每個伺服周期最后兩個實際位置的差值;CV(n)是伺服周期n內(nèi)的指令速度,即為每個伺服周期最后兩個指令位置的差值;CA(n)是伺服周期n內(nèi)的指令加速度,即為每個伺服周期最后兩個指令速度的差值;IE(n)是伺服周期n的跟隨誤差的積分,大小為
2 實驗用直線電機簡介
該電機應(yīng)用于龍門五軸加工中心立柱上,最大推力12000 N,低速可至1 m·min-1,最高速度可達1 m/s。具有大推力、速度范圍寬特點,是提供直線進給的優(yōu)良系統(tǒng),電機實物如圖4所示。
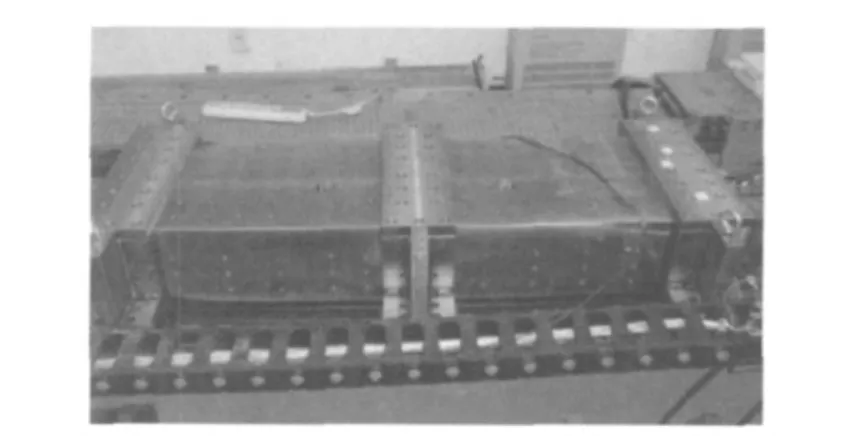
圖5 永磁同步直線電機實物圖
直線電機底部為次級板,其結(jié)構(gòu)呈U型,次級長1.32 m,寬0.26 m,高0.17 m,材料由ZG35鑄造而成,表面鍍鋅,N級磁鋼和S級磁鋼交替貼在次級表面時,并且要使同一極板兩側(cè)極性相反,同一側(cè)的兩片相鄰磁鋼用分隔條隔開,用膠粘牢固后,灌環(huán)氧樹脂密封成整體。
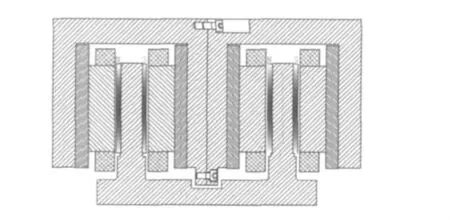
圖6 永磁同步直線電機結(jié)構(gòu)簡圖
直線電機的初級是由兩塊安裝板并聯(lián)在一起,長1.4 m,寬0.36 m,高0.22 m,由鑄鐵35鑄造而成,經(jīng)過加工后,表面鍍白鋅,水冷板介于次級線圈與安裝板之間,由鑄鋁制成,內(nèi)嵌有鋁管,用于通水為初級線圈冷卻。
3 直線電機的測試實驗
PMAC執(zhí)行程序Pewin提供了調(diào)節(jié)PID參數(shù)的工具PMAC Tuning Pro,可以方便地調(diào)節(jié)PID參數(shù)。打開Pewin首先調(diào)節(jié)系統(tǒng)的開環(huán)特性,開環(huán)特性調(diào)節(jié)完畢后,調(diào)整系統(tǒng)的穩(wěn)態(tài)特性,分別調(diào)節(jié)PID參數(shù)中的比例增益、微分增益、積分增益,使系統(tǒng)階躍響應(yīng)曲線穩(wěn)態(tài)誤差為0,并且超調(diào)量不要過大,得到良好的誤差曲線。最后調(diào)節(jié)系統(tǒng)的動態(tài)特性,以正弦信號為輸入調(diào)節(jié)系統(tǒng)的跟隨誤差,根據(jù)正弦響應(yīng)曲線調(diào)整適當?shù)乃俣取⒓铀俣惹梆佅禂?shù),使系統(tǒng)的跟隨誤差最小,得到較好的動態(tài)響應(yīng)曲線。
經(jīng)反復調(diào)試比較,得到圖7的階躍線響應(yīng)曲線。從圖中可以看出,系統(tǒng)有較好的階躍響應(yīng)曲線,證明PMAC卡對直線電機的控制具有良好的效果。
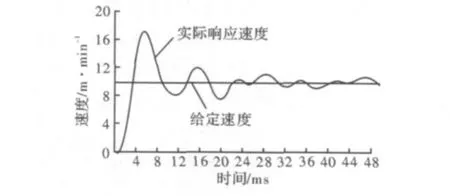
圖7 階躍響應(yīng)曲線
圖8為穩(wěn)態(tài)時給定速度為10 m·min-1時,給定速度與實際速度的比較曲線。
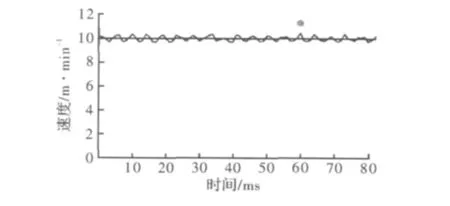
圖8 速度對比曲線
速度波動

速度波動在誤差允許范圍之內(nèi)。
圖9為系統(tǒng)的動態(tài)響應(yīng)曲線,從曲線上可以看出,最大的跟隨誤差為420 μm。
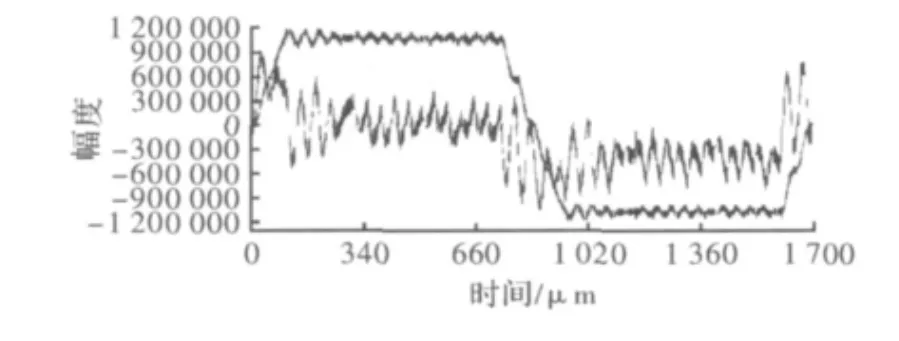
圖9 動態(tài)響應(yīng)曲線
4 結(jié)束語
依據(jù)直線電機的伺服特點,提出了前饋+PID算法的控制策略,運用該控制策略使直線電機具有良好的速度穩(wěn)定性以及較小的跟隨誤差。伺服算法嵌入到Turbo Pmac Clipper中,利用PMAC Tuning Pro2可以方便地對系統(tǒng)的控制參數(shù)進行調(diào)節(jié),為以后直線電機朝著高速度、高精度的方向發(fā)展提供了支持。
[1] Delta Tau.Turbo PMAC usual manual[M].USA:Delta Tau Data System,Inc,2008.
[2] 葉云岳.直線電機的原理與應(yīng)用[M].北京:機械工業(yè)出版社,2000.
[3] 黃笑天,張建明,龐長濤,等.微銑削系統(tǒng)中直線電機的應(yīng)用研究[J].航空精密制造技術(shù),2007,43(2):21-23.
[4] YUSUF A.數(shù)控技術(shù)與制造自動化[M].羅科學,譯.北京:北京化學工業(yè)出版社,2002.
[5] 郭慶鼎,孫宜標,王麗梅.現(xiàn)代永磁電機交流伺服系統(tǒng)[M].北京:中國電力出版社,2006.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32