基于UWB技術(shù)的無線定位系統(tǒng)的研究與測試
2011-04-20 07:27:12孫錦中
上海電力大學(xué)學(xué)報 2011年4期
關(guān)鍵詞:信號
孫錦中
(上海電力學(xué)院計(jì)算機(jī)與信息工程學(xué)院,上海 200090)
近年來無線定位技術(shù)在軍事和民用領(lǐng)域已獲得了廣泛的應(yīng)用,如雷達(dá)和GPS等.超寬帶(Ultra W ide Band,UWB)技術(shù)因其具有豐富的帶寬在定位方面具有很大的優(yōu)勢,在理論上超寬帶的定位精度可以達(dá)到厘米級,因此UWB技術(shù)在精確定位方面具有實(shí)際的應(yīng)用前景.
1 UWB的定位方法
UWB技術(shù)是一種高速、低成本和低功耗的無線通信技術(shù).它不用載波,而采用時間間隔極短(納秒或納秒級以下)的非正弦波窄脈沖進(jìn)行通信,也稱作脈沖無線電(Impulse Radio)、時域(Time Domain)或無載波(Carrier Free)通信.由于UWB系統(tǒng)的脈沖持續(xù)時間極短,具有較強(qiáng)的時間和空間分辨率,因此可以有效地對抗多徑衰落,可以在測距、定位和跟蹤方面實(shí)現(xiàn)很高的精度,在無線定位中具有突出的特點(diǎn)和優(yōu)勢[1].
UWB定位技術(shù)屬于無線定位技術(shù)的一種,其定位原理按其測量參數(shù)的不同,可分為基于接收信號強(qiáng)度法、基于接收信號角度法和基于接收信號時間法3種.基于接收信號強(qiáng)度的定位方法是利用接收信號強(qiáng)度與待測目標(biāo)至接收基站距離成反比的關(guān)系,通過測出接收信號的場強(qiáng)值、已知的信道衰落模型和發(fā)射信號的場強(qiáng)值估算出收發(fā)信號機(jī)之間的距離,根據(jù)多個距離值即能估計(jì)出待測目標(biāo)的位置.基于接收信號角度的定位方法就是通過信號到達(dá)的方向來確定信號的位置.這種定位技術(shù)一般利用兩個或多個參考結(jié)點(diǎn),通過測量接收信號的到達(dá)方向來估計(jì)目標(biāo)結(jié)點(diǎn)的位置.基于接收信號時間的定位技術(shù)依賴節(jié)點(diǎn)間信號傳輸時間的測量,如果兩個節(jié)點(diǎn)共用一個時鐘,則接收信號的結(jié)點(diǎn)可以通過參考節(jié)點(diǎn)的時間信息來確定接收信號的到達(dá)時間.對于一個單路徑的加性高斯白噪聲(AWGN)信道來說,基于接收信號時間的技術(shù)是非常適合于UWB無線定位系統(tǒng)的,這主要?dú)w功于其非常寬的帶寬[2].
2 UWB定位系統(tǒng)的構(gòu)建
一個典型的UWB定位系統(tǒng)主要包含3個部分,即:電池供電的活動標(biāo)簽(Tag),能夠發(fā)射UWB信號來確定位置;位置固定的傳感器(Sensor),能夠接收并估算從標(biāo)簽發(fā)送過來的信號;綜合所有位置信息的軟件平臺(Software Platform),能夠獲取、分析并傳輸信息給用戶和其他相關(guān)信息系統(tǒng).
在該系統(tǒng)中,標(biāo)簽發(fā)射極短的UWB脈沖信號,傳感器接收此信號,并根據(jù)脈沖到達(dá)的時間差分和脈沖到達(dá)的角度計(jì)算出標(biāo)簽的精確位置.由于采用了UWB技術(shù),加上傳感器內(nèi)部有一個UWB接收器陣列,從而在定位計(jì)算時可以得到高精度的角度坐標(biāo),以確保較高的定位精度和室內(nèi)應(yīng)用的可靠性.傳感器通常按照蜂窩單元的形式進(jìn)行組織,附加的傳感器可以根據(jù)其幾何覆蓋區(qū)域進(jìn)行增加.在每個定位單元中,主傳感器配合其他傳感器工作,并與單元內(nèi)所有檢測到位置的標(biāo)簽進(jìn)行通訊.通過類似于移動通訊網(wǎng)絡(luò)的蜂窩單元組合,能夠做到較大面積區(qū)域的覆蓋.同時,傳感器也支持雙向的標(biāo)準(zhǔn)射頻通訊,允許動態(tài)改變標(biāo)簽的更新率,使交互式應(yīng)用成為可能.通過標(biāo)準(zhǔn)以太網(wǎng)線或無線局域網(wǎng),可以將標(biāo)簽位置發(fā)送到定位引擎軟件.定位引擎軟件將數(shù)據(jù)進(jìn)行綜合,并通過API接口傳輸?shù)酵獠砍绦蚧蚨ㄎ黄脚_軟件,實(shí)現(xiàn)空間信息的可視化處理[3,4].
3 UWB定位系統(tǒng)實(shí)例測試及分析
為了驗(yàn)證UWB定位系統(tǒng)的可靠性與精確度,筆者建立了實(shí)際的UWB無線定位系統(tǒng)進(jìn)行實(shí)驗(yàn)與測試.
實(shí)驗(yàn)中的UWB無線定位系統(tǒng)采用了英國Ubisense公司提供的標(biāo)簽(Ubisense Tag)和傳感器(Ubisense Sensor),在實(shí)驗(yàn)室中建立實(shí)際的測試環(huán)境.該測試房間為14.71 m×8.72 m×4 m,為了便于進(jìn)行實(shí)驗(yàn)數(shù)據(jù)的分析和處理,我們將房間分隔成長寬各為1 m的方格,并對房間建立坐標(biāo)系.
定位場景的空間坐標(biāo)系如圖1所示.
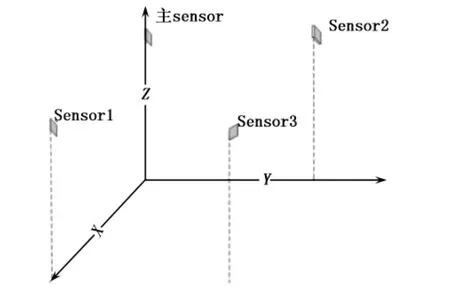
圖1 定位場景的空間坐標(biāo)系
位于4個角落的4個Sensor的坐標(biāo)分別為:主Sensor為0.10,0.12,2.14;Sensor 1為6.21,0,2.14;Sensor 2為0.16,13.28,2.12;Sensor 3為5.93,13.29,2.12.
3.1 靜態(tài)定位測試
在靜態(tài)定位測試中,將移動標(biāo)簽依次放在房間內(nèi)預(yù)先劃定的各方格的頂點(diǎn),然后分別對每個點(diǎn)進(jìn)行數(shù)據(jù)采集,根據(jù)采集的數(shù)據(jù)測出各點(diǎn)的位置坐標(biāo),畫出測試點(diǎn)在房間內(nèi)的分布圖,再用測得的各點(diǎn)坐標(biāo)與真實(shí)坐標(biāo)相比較,計(jì)算出誤差,以此評估定位系統(tǒng)的精確度和可靠性.
實(shí)驗(yàn)中,對每個點(diǎn)采集50個數(shù)據(jù),根據(jù)測試數(shù)據(jù)繪出各點(diǎn)的分布圖如圖2所示.
觀察4個Sensor情況下點(diǎn)的分布情況可以發(fā)現(xiàn),最邊緣的Y=1區(qū)域與Y=13區(qū)域的點(diǎn)呈現(xiàn)無規(guī)律的發(fā)散狀態(tài),此時點(diǎn)的精度已經(jīng)不能保證,因此在分析數(shù)據(jù)時,取有代表性的Y=6這一區(qū)域來進(jìn)行分析,其靜態(tài)測試數(shù)據(jù)如表1所示.
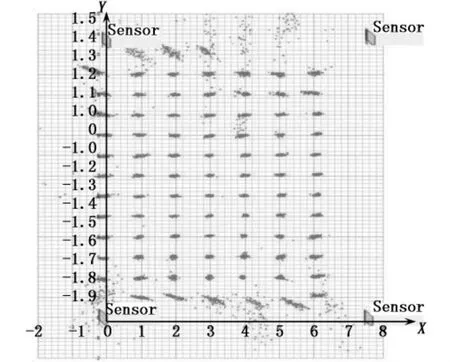
圖2 靜態(tài)測試點(diǎn)分布

表1 靜態(tài)測試數(shù)據(jù)記錄(Y=6)/m
由表1可知:
(1)除了邊緣區(qū)域外,所有的Y坐標(biāo)的精度都在0.05 m以內(nèi);
(2)除了邊緣區(qū)域外,所有的X坐標(biāo)的精度都在0.1 m以內(nèi);
(3)用4個Sensor并不能提高靜止點(diǎn)的X和Y坐標(biāo)值,但是對于Z的提高有幫助;
(4)在使用4個Sensor的情況下,定位精度是最理想的,同時也能很好地保證信號的覆蓋效果,但是從圖2也可以看出,在測試區(qū)域的邊緣仍然會出現(xiàn)采集到的測試數(shù)據(jù)精度太差以至于無法準(zhǔn)確繪出測試點(diǎn)位置的情況,因此需要舍棄邊緣區(qū)域的測試數(shù)據(jù),選用靠近中心區(qū)域的測試數(shù)據(jù),以獲得理想的測試結(jié)果.
3.2 動態(tài)定位測試
在動態(tài)測試中,先設(shè)定好移動標(biāo)簽的運(yùn)動軌跡,如圖3所示,讓移動標(biāo)簽沿此軌跡運(yùn)動,然后再根據(jù)傳感器測得的定位數(shù)據(jù)畫出標(biāo)簽的運(yùn)動軌跡,將兩個軌跡相比較,分析動態(tài)定位的可靠性與精確度.
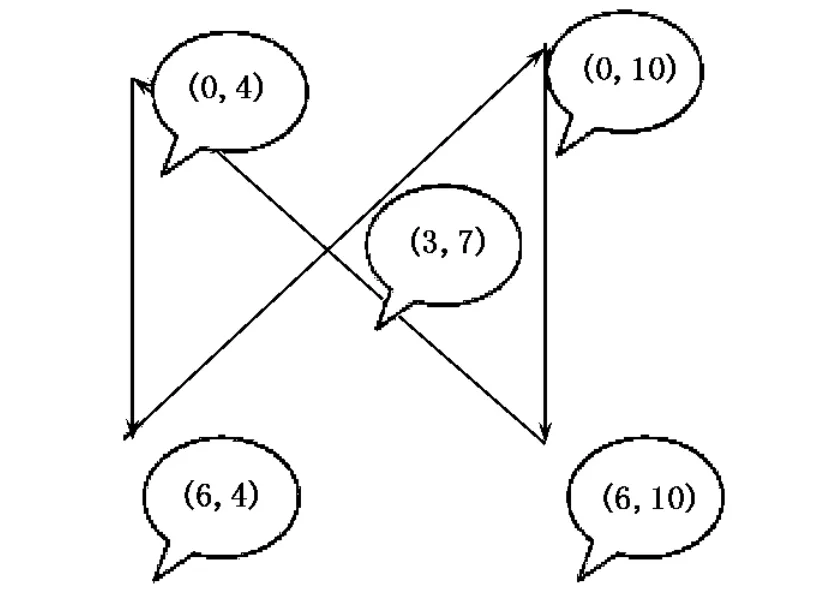
圖3 動態(tài)測試運(yùn)動軌跡設(shè)定
對移動標(biāo)簽的定位數(shù)據(jù)進(jìn)行分析,可得到移動標(biāo)簽的定位軌跡,如圖4所示.
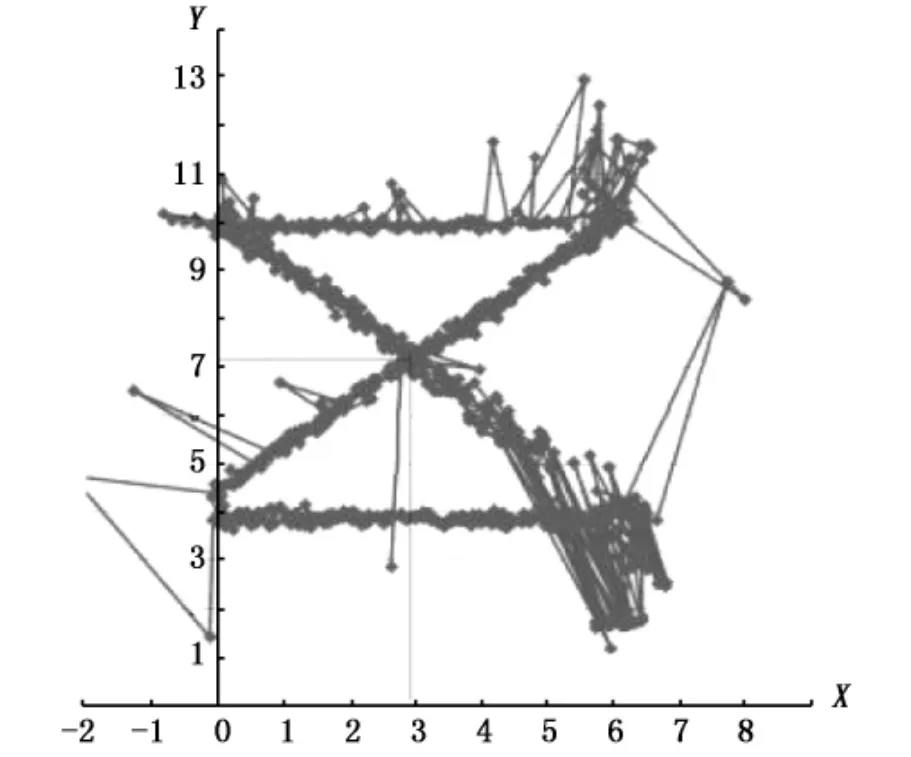
圖4 動態(tài)測試運(yùn)動點(diǎn)分布
由圖4可知,中間折線的交點(diǎn)基本在(3,7)點(diǎn)處,而且很明顯的上半三角形比下半三角形要大,同時兩條橫向直線段的縱坐標(biāo)基本在4與10處,這與預(yù)先設(shè)定的運(yùn)動軌跡吻合.如果應(yīng)用一些異常規(guī)則將異常點(diǎn)去除后,可以得到更精確的運(yùn)動軌跡圖.此外,當(dāng)物體運(yùn)行到X=6處轉(zhuǎn)彎時,點(diǎn)的分布呈現(xiàn)集體異常情況.這是因?yàn)闇y試時將標(biāo)簽放在人的外面口袋,轉(zhuǎn)彎時有一個較大的幅度,所以會出現(xiàn)這樣的結(jié)果.
4 結(jié)語
信號的距離分辨力與信號的帶寬成正比.由于超寬帶信號的超寬頻帶特性,使得UWB系統(tǒng)的距離分辨精度是其他系統(tǒng)的幾百甚至上千倍.UWB信號脈沖寬度為納秒級,其對應(yīng)的距離分辨率可達(dá)到厘米級,這是其他窄帶系統(tǒng)無法比擬的.較高的距離分辨精度也使得超寬帶系統(tǒng)在完成通信的同時,還能實(shí)現(xiàn)準(zhǔn)確的定位和跟蹤,定位與通信功能的融合也擴(kuò)展了超寬帶系統(tǒng)的應(yīng)用范圍.通過對UWB定位系統(tǒng)進(jìn)行室內(nèi)靜態(tài)定位和動態(tài)定位測試可以看出,采用超寬帶無線電很容易實(shí)現(xiàn)室內(nèi)的精確定位,又因?yàn)槠渚哂械凸摹⒖垢蓴_強(qiáng)的特點(diǎn),所以在無線定位方面,UWB技術(shù)有著廣闊的應(yīng)用前景.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
