基于FPGA的飛行動態參數采集系統
2011-04-13 02:01:52陽衛平
科技傳播 2011年3期
陽衛平
中北大學,山西 太原 030051
0 引言
本文提出一種采用FPGA為主控制平臺的動態數據采集系統,外部的各種傳感器采集到的數據統一輸入到FPGA,FPGA完成數據的接收接口,數據緩存,采樣輸入控制的功能。
1 原理
整個系統由數據采集輸入,緩存輸入,輸入數據處理模塊,外部存儲模塊組成。
數據采集輸入模塊包含了各種測量環境狀態的傳感器,包括溫度傳感器,壓差傳感器,濕度傳感器,速度傳感器,風速風向儀,高度計,GPS,慣性傳感器。緩存輸入模塊包含了相應的8組FIFO用來緩存傳感器輸出來的數據。數據處理模塊主要是實現了多傳感器數據融合。外部存儲模塊主要是實現了環境狀態數據的備份或者緩存。整個系統的原理框圖如圖1所示:
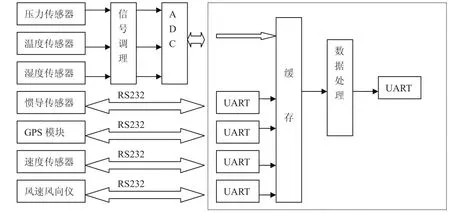
圖1 系統原理框圖
壓力傳感器,溫度傳感器,速度傳感器對于所處位置和精度要求不是特別高所以可以采用傳統的調理加采樣的電路就能獲得數據。而慣導傳感器,GPS模塊,速度傳感器,風速風向儀對于傳感器的擺放位置和精度都要求比較多,因此采用了集成的傳感器模塊,這種模塊內部已經包含了調理和采樣電路而且是用小型單片機加上了各種參數補償,所采集的數據能通過RS232接口傳出。
以上各種傳感器的數據出來后都統一放置在FPGA開辟出來的Block RAM 高速緩存中,然后后面的數據處理模塊就能夠從RAM里面獲得數據進行處理,處理完的數據最后通過RS232的接口傳輸到上位機中。
2 各模塊的設計
2.1 數據輸入模塊
各個傳感器選擇工業級的就能夠滿足要求,同時為了能給ADC提供一個穩定的基準電源,這個基準電源很重要,直接影響到ADC的轉換精度。在這里我們采用AD780作為參考電壓源。AD7667中AD_CS#為片選信號負電平有效;D0-D15為數字信號輸出通道,轉換完成后的數據由此輸出;AD_START表示開始轉換信號,AD_BSY為高電平時,表示目前正處于轉換當中,轉換結束后自動變為低電平,該信號的下降沿可以作為讀數據的時鐘信號[1]
2.2 接口和緩存模塊
接口分為兩種,一種是通過AD7667出來的數字信號直接就存在緩沖RAM中。還有一種通過RS232傳輸的傳感器數據則需要在FPGA中采用UART IP核以解碼串口中的數據,然后再存入在緩沖RAM中。由于UART IP的使用非常廣泛且簡單,所以這里沒有必要詳細說明。
2.3 數據處理模塊
各個傳感器的數據進入到RAM后,就要對這些數據進行一些必要的處理了,數據處理模塊正式完成這項任務的。
多傳感器數據融合其基本原理是充分利用多個傳感器資源及其觀測數據的合理支配和使用,把多個傳感器在空間或時間上的冗余或互補信息依據某種準則進行組合,以獲得比其各組成部分的子集更優越的性能[2]。
在這里我們采用的數據融合模式是使用GPS接收機和慣導系統互相輔助,把GPS和慣導系統按綜合的要求進行一體化設計的緊密組合模式。GPS接收機提供接收后的原始數據稱之為偽距、偽距率。偽距、偽距率組合便于卡爾曼濾波器的設計與實現,便于組合導航系統的一體化設計 。
2.4 外部存儲模塊
外部存儲模塊與接口模塊類似同樣是通過UART IP核來實現RS232接口,通過這個接口把數據傳輸到上位機中。
3 結論
本文設計了一種低成本的嵌入式數據采集系統,可以作為飛行控制的采集板來使用,在未來還可以采取測量精度更高的傳感器,以改進電路系統。同時對多傳感器數據融合算法的研究可以更深以便改善整個系統的軟件性能。
[1]AnalogDevices.16-bit1MSPSSARUnipolarADCwithRef,2002.
[2]楊萬海.多傳感器數據融合及應用[M].西安:西安電子科技大學出版社,2004.
[3]何友.多傳感器信息融合及應用[M].北京:電子工業出版社,2001:112-145.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
心理學報(2022年4期)2022-04-12 07:38:02
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
水泵技術(2021年3期)2021-08-14 02:09:20
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代出版(2020年3期)2020-06-20 07:10:34
家庭影院技術(2017年9期)2017-09-26 03:41:45