伺服運動系統(tǒng)控制參數(shù)在線調節(jié)算法研究
2011-03-23 03:44:58宋福民
電子工業(yè)專用設備 2011年8期
關鍵詞:指令
方 強,宋福民
(深圳市大族數(shù)控科技有限公司,廣東 深圳 518057)
伺服運動系統(tǒng)通常采用PID+前饋控制策略,具有魯棒性強(對工況的適應能力強)、算法容易實現(xiàn)等優(yōu)點,然而PID+前饋控制策略屬于經典控制理論范疇,適合于線性控制系統(tǒng),但是實際工程應用中往往受非線性、參數(shù)時變等不確定性因素的影響,導致控制效果不理想;此外由于參數(shù)整定直接受負載性能的影響,往往整定不良、性能欠佳,導致對運行工況(擾動、參數(shù)時變等)的適應性差。
伺服控制系統(tǒng)的基本結構如圖1所示。

圖1 伺服控制系統(tǒng)框圖
伺服控制策略中,比例環(huán)節(jié)用于調節(jié)伺服運動系統(tǒng)的剛性,微分環(huán)節(jié)提供運動所需要的阻尼(改善系統(tǒng)動態(tài)性能),積分環(huán)節(jié)用于消除穩(wěn)態(tài)誤差,速度前饋環(huán)節(jié)用于減小由阻尼引起的跟隨誤差,加速度前饋環(huán)節(jié)用于減小由系統(tǒng)慣性帶來的跟隨誤差。因此研究控制參數(shù)自適應控制算法對改善伺服運動系統(tǒng)性能具有重要意義。
首先提出了基于速度分段的控制參數(shù)整定原理和在線調節(jié)原理,再基于PMAC控制器開發(fā)控制參數(shù)在線調節(jié)算法程序,之后在實際PMAC伺服運動系統(tǒng)上驗證了該算法的有效性。
1 控制參數(shù)分段整定算法
傳統(tǒng)PID+前饋伺服控制算法,一旦控制參數(shù)整定完畢就被固定到控制器中,不能根據(jù)現(xiàn)場的變化進行適應性調整。通過對實際伺服運動系統(tǒng)跟隨誤差的測量發(fā)現(xiàn)當運動平臺的速度和加速度發(fā)生改變時,跟隨誤差的波形隨之變化,為此可以將運動平臺的速度曲線劃分為多個連續(xù)的小區(qū)間,然后分別對各個速度區(qū)間上的控制參數(shù)進行整定。
1.1 構建速度分段模型
伺服運動系統(tǒng)的軌跡規(guī)劃方法通常有梯形曲線加減速和S曲線加減速兩種。兩種加減速曲線如圖2所示。

圖2 伺服運動系統(tǒng)加減速曲線
從圖2可以看出S曲線加減速規(guī)劃相對于梯形曲線加減速規(guī)劃,運動平臺的速度變化平滑,減小了因加速度突變引起的沖擊。以梯形指令速度曲線為例建立如圖3所示的速度分段模型。

圖3 速度分段模型
圖中將指令速度曲線的靜止段、勻速段劃分為兩個獨立的速度段,將加速段和減速段分別劃分為多個連續(xù)的速度段。考慮到反向運動,各個速度段具有如下特征:

說明:V和A分別為當前指令速度和指令加速度,V1、V2和V3為所劃分的速度區(qū)間的端點速度(由用戶對指令速度曲線進行劃分后確定),Vmax為最大指令速度。
1.2 控制參數(shù)分段整定
在構建了速度分段模型后,可以通過采集各個速度段上的跟隨誤差數(shù)據(jù),構建評價函數(shù),經過多次試驗整定出使評價函數(shù)值最小的控制參數(shù)。控制參數(shù)整定方法通常有人工整定和自整定兩種方法,人工整定法依賴于調試人員的經驗,具有一定的隨意性、整定效率低、整定效果難以逼近最優(yōu),為此結合速度分段模型給出如下控制參數(shù)分段自整定方法,見圖4。

圖4 控制參數(shù)分段自整定原理圖
控制參數(shù)分段自整定不能由運動控制器的底層在線調節(jié)程序單獨完成,否則受到數(shù)據(jù)采樣、計算延遲等的影響會降低在線調節(jié)程序的實時性。在線調節(jié)程序只用于對指令速度和指令加速度進行在線監(jiān)測,并根據(jù)速度分段模型切換控制參數(shù),而控制參數(shù)的修改、跟隨誤差數(shù)據(jù)采集、控制參數(shù)尋優(yōu)等功能需要由上層應用軟件來完成。
控制參數(shù)分段自整定的關鍵在于研究合適的控制參數(shù)尋優(yōu)算法,對于單個控制參數(shù)尋優(yōu)算法很容易實現(xiàn)(通過單循環(huán)法搜索合適的控制參數(shù),使得評價函數(shù)值最小),而對于多個控制參數(shù)的尋優(yōu),如果采用循環(huán)嵌套尋優(yōu)法,則效率極低,且容易受循環(huán)步長影響。單純形法是解決高維尋優(yōu)的最優(yōu)化方法,它不需要求導數(shù),只要能夠測量到系統(tǒng)的響應值就可以使用。
2 控制參數(shù)在線調節(jié)算法
控制參數(shù)在線調節(jié)就是根據(jù)速度分段模型,當指令速度落入相應的速度段,立即將控制器參數(shù)切換為該速度段上事先整定出的控制參數(shù)。由于速度段的區(qū)間較寬,避免了控制器參數(shù)的頻繁切換,可以滿足控制器在線調節(jié)程序實時性需要,見圖5所示。
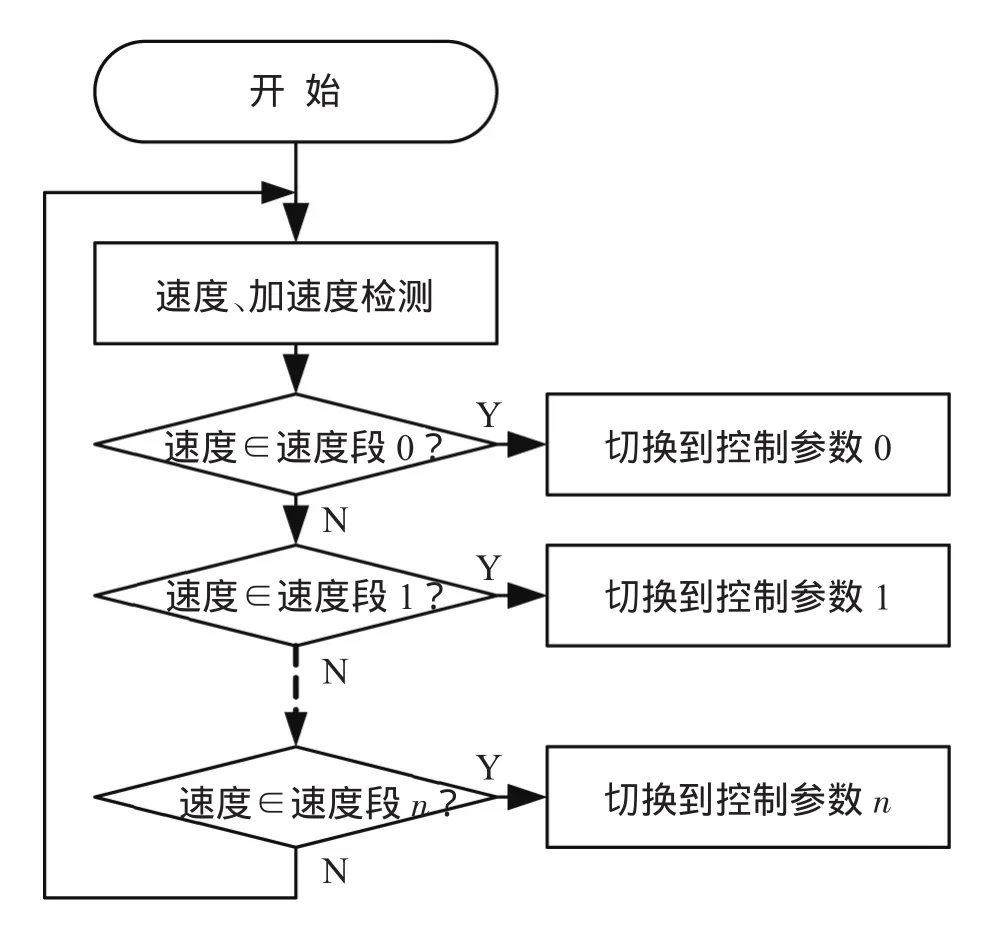
圖5 控制參數(shù)在線調節(jié)流程圖
3 算法實現(xiàn)
為了驗證算法的有效性,以PMAC運動控制器為研究對象詳細介紹算法的實現(xiàn)過程。PMAC控制器是Delta Tau公司生產的多軸運動控制器,能夠對存儲在它內部的程序進行單獨運算,同時執(zhí)行運動程序、PLC程序和伺服控制程序,而且可以自動對任務進行優(yōu)先級判別,從而進行實時的多任務處理。
PMAC控制器參數(shù)的分段自整定與在線調節(jié)算法實現(xiàn)的基本思路是:利用PMAC控制器允許嵌入PLC程序的功能開發(fā)出用于速度分段和控制參數(shù)快速切換的PLC程序,基于PMAC控制器上的高速數(shù)據(jù)采集功能開發(fā)出上層應用程序,實現(xiàn)運動數(shù)據(jù)采集、評價函數(shù)計算、控制參數(shù)整定、控制參數(shù)下載等功能。
PLC程序實現(xiàn)如下功能:
(1)速度分段,即設定各個速度段的端點速度;
(2)指令速度、指令加速度在線監(jiān)測;
(3)根據(jù)指令速度所處的速度區(qū)間實時切換控制參數(shù)。
上層應用程序實現(xiàn)如下功能:
(1)PMAC高速數(shù)據(jù)采集與解碼;
(2)計算評價函數(shù);
(3)控制參數(shù)(KP、KD、KAFF)整定(人工整定和自整定);
(4)下載控制參數(shù)到PMAC控制器中。
上層應用程序界面操作形式如圖6、圖7所示。
為了驗證控制參數(shù)在線調節(jié)算法對改善系統(tǒng)動態(tài)性能的有效性,在PMAC控制器上嵌入控制參數(shù)在線調節(jié)PLC程序,結合上層應用程序整定出各個速度段上的加速度前饋增益值并測試出采用控制參數(shù)在線調節(jié)算法前后的跟蹤誤差曲線。
測試前先根據(jù)跟隨誤差變化情況建立速度分段模型(最大速度為160 cts/ms、最大加速度為1 cts/ms2),然后確定需要整定的控制參數(shù)的取值范圍,最后對各個速度段上的控制參數(shù)進行整定(人工或自動整定)并下載到PMAC控制器中。測試曲線如圖8所示。

圖6 PMAC控制器PID參數(shù)分段整定界面
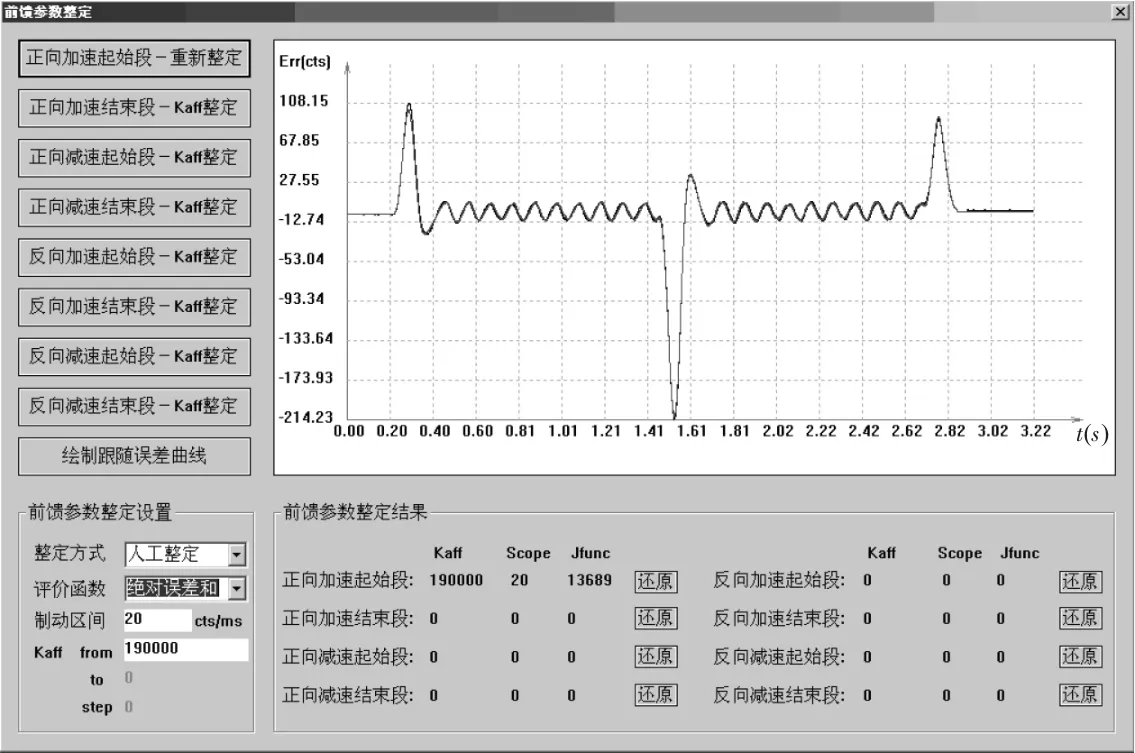
圖7 PMAC控制器加速度前饋增益分段整定界面
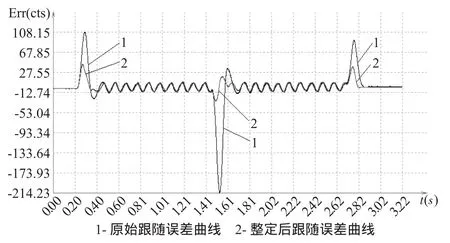
圖8 系統(tǒng)定位運動實拍跟隨誤差曲線
4 結論
(1)伺服運動系統(tǒng)本身是一個慣性系統(tǒng),加速度、驅動質量越大,慣性就越大,由此引起的跟隨誤差就越大,因此對加速度前饋增益進行在線調節(jié),能明顯改善系統(tǒng)的動態(tài)性能;
(2)受在線調節(jié)程序實時性的限制,控制參數(shù)分段自整定算法需要由底層實時控制程序和上層應用程序聯(lián)合實現(xiàn);
(3)控制參數(shù)整定,既可以對單個參數(shù)進行整定,也可以對多個參數(shù)聯(lián)合整定,從而尋找出對改善伺服運動系統(tǒng)控制性能最有效的敏感參數(shù);
(4)實現(xiàn)控制參數(shù)在線調節(jié)功能的前提是建立速度分段模型,因此劃分合適的速度分段區(qū)間對改善伺服運動系統(tǒng)動態(tài)性能有明顯影響;
(5)如果底層在線調節(jié)程序能夠運行在最高優(yōu)先級的伺服中斷上(如TurboPMAC提供的開放伺服功能),則該算法能夠應用到高速伺服運動系統(tǒng)中。
[1]楊更更,葉佩青,楊開明,等.基于PMAC的數(shù)控系統(tǒng)PID參數(shù)自適應調節(jié)[J].機械工程師2002(4):13-15.
[2]劉金琨.先進PID控制及其MATLAB仿真[M].北京:電子工業(yè)出版社,2003.
[3]陳玉霜,朱學峰,劉維之.簡易單參數(shù)自適應PID控制研究[J].計算技術與自動化.2006,25(4):11-13.
[4]聶建華,李晟.基于前饋及自適應濾波的零跟蹤誤差伺服控制器[J].制造技術與機床,2007(9):109-112.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
