一種精密測距模擬器系統延時的測量方法
2011-03-20 03:50:18李占明溫秀琴
電子科技 2011年7期
李占明,溫秀琴
(1.陜西凌云電器集團有限公司設計所,陜西寶雞721006;2.陜西凌云電器集團有限公司科技處,陜西寶雞721006)
精密測距模擬器的系統延時是指從模擬器射頻端口輸入的射頻詢問脈沖信號的定時點起,到模擬器經過零公里的距離延時時間后,通過射頻端口輸出的射頻應答脈沖信號的定時點之間的時間差。輸入的詢問信號頻率為1 025~1 150 MHz,輸出的信號頻率為962~1213 MHz,兩個信號頻率相差63 MHz,而且頻帶覆蓋較寬。精密測距模擬器通常有X、Y、Z、W共4種工作波道,在每種工作波道下又分為初始進場模式和最終進場模式,在每種模式下詢問器的詢問脈沖編碼和模擬器的應答脈沖編碼均不相同,其系統延時也不相同。
1 測量原理
1.1 系統延時
詢問脈沖編碼和應答脈沖編碼及系統延時如表1所示。
1.2 測量原理及精度
詢問器發射的詢問信號和模擬器的應答信號均為射頻脈沖信號,其脈沖包絡波形如圖1所示,其參數要求為:(1)脈沖上升時間<1.6 μs;(2)脈沖下降時間<2.5~3.5 μs;(3)脈沖寬度3.5±0.5 μs;(4)部分上升時間0.2~0.3 μs。

表1 詢問、應答脈沖編碼及系統延時表
要測量的系統延時在IA模式為詢問脈沖對第一脈沖50%點和應答脈沖對第一脈沖50%點之間的時間,而在FA模式為詢問脈沖對第一脈沖虛擬原點和應答脈沖對第一脈沖虛擬原點之間的時間,虛擬原點為脈沖上升沿30%點和5%點連線的延長線與橫軸的交點,并且兩點之間呈線性,所以為了便于測量,在FA模式可測量兩脈沖10%點之間的時間。
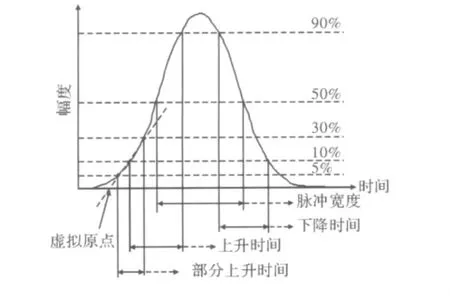
圖1 脈沖包絡波形圖
按照《國際民用航空公約》中準確度標準1的要求[1-2],距離精度FA模式為±10 m,IA為±15 m,折合時間分別為±33 ns和±50 ns。
2 測量方法
2.1 測量框圖
詢問器發射的詢問信號由耦合器的A端加入,一方面經過耦合器衰減耦合輸出至衰減器的B端,經過衰減器到檢波器的C端,然后檢波輸出至示波器;另一方面經過耦合器到達E端,由D端進入模擬器。模擬器接收到詢問信號,經過系統延時后產生應答信號由D端輸出經E端由耦合器耦合輸出至檢波器的F端,然后檢波輸出至示波器。測量原理框圖如圖2所示[3-4]。

圖2 測量框圖
詢問器發射的詢問信號功率較大,為了保證不損壞檢波器,信號在進入C端前必須對信號進行衰減。
2.2 數據分析
系統采用標準發射信號源代替詢問器,要保證其發射波形滿足上述要求,由信號源到耦合器A端的電纜對信號的延時不予考慮;當采用相同型號和特性的檢波器且電纜M和N采用相同介質、長度的電纜時,發射信號和回答信號所經過這部分的延時相同,相互抵消,可不計入系統延時。按發射和回答信號所經過的路徑,對系統延時可能造成影響的環節就分別集中在以下兩個方面。
發射信號經過的路徑延時包括:(1)由A端到B端的延時,記作Ta1;(2)由B端到C端的延時,記作Ta2;(3)由A端到E端的延時,記作Ta3;(4)由E端到D端的延時,記作Ta4。
回答信號經過的路徑延時包括:(1)由D端到E端的延時,記作Tb1;(2)由E端到F端的延時,記作Tb2。
為了便于分析,定義發射信號由A端到C端的延時記作TT1(即TT1=Ta1+Ta2),由A端到D端的延時記作TT2(即TT2=Ta3+Ta4),接收信號由D端到F端的延時記作TR(即TR=Tb1+Tb2),模擬器的系統延時標稱值記作To,示波器測量的延時記作TS。
下面分兩種情況進行討論:
(1)當TT1≤TT2時,時序如圖3所示。

圖3 脈沖時序1
測量延時為TS=To+TT2-TT1+TR,由此可見,測量延時應為規定的系統標稱延時值和一固定時間(TX2-TX1+TR)之和。
(2)當TT1>TT2時,時序如圖4所示。則測量的延時

令Tk=TT2-TT1+TR,則TS=To+Tk。
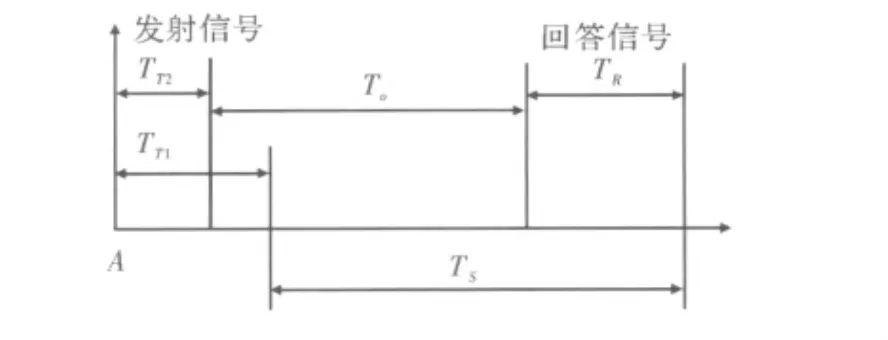
圖4 脈沖時序2
從以上情況分析來看,理論測量的延時值應為系統規定的標稱延時值與一固定延時之和。
2.3 各組件對信號延時分析
當測量出TS的值后,要計算模擬器的系統延時To,需進一步確定出試驗中引入的固定延時Tk。其固定延時Tk主要由幾個組件帶來,可分別采用測量和計算的方法確定其值,當實際中采用儀表不能有效地測量組件的延時時,以理論計算的延時值為準。
(1)高頻電纜對信號的延遲。
方法1測量法。通過網絡分析儀測量出信號經過電纜的延遲,以確定Ta4、Tb1的值。
方法2計算法。通常采用的高頻電纜芯線為銅材,芯線與外層屏蔽之間采用聚乙烯材料,按式(2)計算信號在電纜中的傳輸速度V。
如果規定電纜長度為0.5 m,那么信號經過電纜的延遲時間為

其中,ξr=2.26。因此,發射信號經過電纜E到D的延遲Ta4=2.5 ns;回答信號經過電纜D到E的延遲即Tb1=2.5 ns。
(2)定向耦合器對信號的延遲。
信號經過定向耦合器的主通路Ta3和耦合支路Ta1、Tb2延遲時間可采用計算方法得到,定向耦合器的主通路長度約為12 cm,耦合支路長度約為2 cm,微帶線板材品種較多,其ξr為3.0~10.2不等,分別計算主通路的延時:當ξr取3.0時,延遲時間t≈0.7 ns;當ξr取10.2時,延遲時間為t≈1.2 ns;兩值取四舍五入后的延遲時間t≈1 ns,從而得到Ta3=1 ns。
耦合支路的延時:當ξr取3.0時,延遲時間為t≈0.1 ns;當ξr取10.2時,延遲時間t≈0.2 ns;兩值取四舍五入后的延遲時間t≈0 ns,從而得到Ta1=0 ns,Tb2=0 ns。
(3)衰減器對信號的延遲。
測量中用到的衰減器,可通過網絡分析儀測出其延遲時間,從而確定出發射信號經過衰減器的延時Ta2。也可采用計算的方法得到Ta2=0。
經過上述2分析、測試和計算后,確定出發射信號經過的路徑延時Ta1、Ta2、Ta3、Ta4和回答信號經過的路徑延時Tb1、Tb2后,從而得到TS=To+TT2-TT1+TR=To+6。
3 誤差分析
(1)在實驗中,各組件的高頻接插頭為不可測量部分,其延時初步估計在0.1 ns以內,發射和回答信號經過的接插頭共有8個,按最大延時計算共0.8 ns,折合距離為0.24 m。
(2)在測量檢波視頻脈沖時,示波器分辨率可達1 ns,但其時間標尺是靠人工移動來完成操作,這樣就可能帶來隨機誤差,比實際值小或大1 ns,也即引入1 ns人為誤差,折合距離為0.3 m。
(3)由于發射信號和回答信號每次測量時可能存在一定量不可估計的隨機誤差,以及人為的讀數誤差等因素可能對測量造成一定誤差,為了消除或減小這種隨即誤差,可采用多次測量求平均值的方法解決。

表2 測量數據
在IA和FA模式的①組數據為第1次測量的5次數據,②組數據為第2次測量的5次數據,其平均值之差分別為6 ns和0.6 ns,折合距離為1.8 m和0.18 m。通過5次測量求平均值的方法可減小和改善人為因素帶來的隨機誤差。因此,由高頻接插頭、示波器的測量和人為讀數誤差等因素造成的誤差為2.34 m,滿足系統精度要求。
4 結束語
采取上述方法對PDME-200模擬器不同模式下的距離系統延時進行了測量和數據分析,證明本方法可對模擬器距離系統延時進行有效地測量,從而對模擬器的距離零公里延時定標奠定基礎。
[1] 國際民用航空組織.國際民用航空公約[M].北京:中國民航出版社,1985.
[2] JOHN D K.Antennas:for all applications[M].章文勛,譯.北京:電子工業出版社,2005.
[3] 何進.國外L頻段航空電子設備電磁兼容設計分析及啟示[J].現代電子技術,2010(3):31-36.
[4] 孫景芳,劉寧慶.差分GPS收發信機的軟件化實現[J].現代電子技術,2006(19):22-24,27.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
