一種新的變步長LMS算法
2011-03-06 09:16:48呂春英張洪順
通信技術 2011年3期
呂春英,敖 偉,張洪順
(重慶通信學院,重慶 400035)
0 引言
20世紀90年代初,隨著移動通信的發展,陣列信號處理技術被引入移動通信領域,形成了智能天線這一新的研究領域[1]。它結合了自適應天線技術的優點,通過特定準則下的自適應算法,調整各天線陣元的權值、形成波束動態跟蹤期望用戶、在干擾方向上產生零陷,從而實現智能接收[2]。其核心是智能天線實現的算法,而LMS算法和遞推最小二乘(RLS,Recursive Least Square)算法則是自適應濾波兩類最基本的算法。LMS算法因其結構簡單,穩定性好,一直是自適應濾波算法中經典、有效的算法之一,被廣泛應用于自適應控制、雷達、系統辨識及信號處理等領域[3]。但是,固定步長LMS算法在收斂速度與穩態失調之間存在相互矛盾。步長越小,穩態時的失調量就越小,但算法的收斂速度慢;步長越大,收斂速度快,但失調量和穩態誤差增大。為解決這一矛盾,人們提出了多種變步長LMS算法,現所給算法也是基于變步長的一種新的LMS自適應算法。
1 LMS算法簡介
LMS算法是由Widow和Hoff于20世紀60年代初提出的[4]。其基本思想是通過調整濾波器的自身參數,使濾波器的輸出信號與期望響應之間的均方誤差最小。
自適應線性濾波器的原理框圖如圖 1所示[4]。X(n)為天線陣列接收到的信號,是一個時間序列,其元素由一個信號在不同時刻的取樣值構成;W(n)為自適應濾波器的加權矢量,由自適應線性濾波器的M個權系數構成;輸出響應表示為y(n),d(n)為參考信號,參考信號與輸出響應之差稱為誤差信號,用e(n)表示。其中:M為濾波器的階數;



圖1 自適應線性濾波原理框
自適應線性濾波器按照誤差信號均方值(或平均功率)最小的準則,即:

來自動調整權矢量,E[e2(n)]為自適應濾波器的性能函數,記為ξ。
基本LMS算法的迭代公式為:

μ為步長因子,決定自適應算法的收斂速度,權向量均值收斂時,μ必須滿足:

λmax是輸入信號自相關矩陣R的最大特征值。在實際應用中,自相關矩陣的最大特征值λmax通常是未知的,因此,采用LMS算法的均方收斂條件,即μ滿足不等式[5]

式中,tr[R]是自相關矩陣R的跡。根據矩陣代數知[4]:

由式(8)和式(9),得:

雖然μ取常數時算法簡單,易于實現,但其收斂速度慢,穩態失調系數大。
2 一種新的變步長LMS算法
對步長因子的各種改進算法雖然原理不同,但都遵循同樣的調整原則,即在初始收斂階段或系統參數發生變化時選取較大步長,以便有較快的收斂速度實現對時變系統的跟蹤;而在算法收斂后,系統獲得的權值矢量已經接近最優權值矢量,需要選取較小的步長,用以減小穩態誤差[6]。
現在滿足上述步長調整原則的基礎上,根據文獻[6]和文獻[7]的思想,提出一種新的變步長LMS自適應算法。對雙曲正割函數做簡單函數變換,令y=1-sech(x),其中sech(x)=2/(ex+e?x)。由于該函數可作無窮階微分,所以曲線足夠平滑,同時,自變量變化很小時,函數值也變化很小。其圖形為圖2所示。
由圖2看出,y所表示的函數是一條過原點的光滑曲線,且在初始階段y隨x的變化緩慢;當x接近0時,由于函數底部平滑,y隨x的變化依舊緩慢。文獻[6]和文獻[7]采用的數學函數均存在自變量與函數值呈線性變化的現象,使穩態誤差變大。將x換成e(n),y換成μ(n),e(n)是μ(n)的函數,即得新的步長因子 μ(n)=β{1-sech[αe(n)γ]},0<μ(n)<1/λmax。參數β控制步長曲線的取值范圍,影響算法的收斂速度,α、γ控制步長曲線在誤差接近零時的形狀[6]。新算法的迭代公式如下所示:


圖2 y=1?sech(x)
圖3為α、γ分別取1,β取0.006、0.007、0.008時,μ(n)隨e(n)的變化曲線,圖3的縱坐標是在10-3數量級上,可以看出μ(n)隨β的增大而增大,即增大β可以加快算法的收斂速度,但為了防止發散,β不易過大。圖4為γ取1,β取0.007,α取1、2、3時,μ(n)隨e(n)的變化曲線。可以發現,μ(n)隨α正比增長,但α越大,在誤差接近0時,步長的變化就越劇烈,不利于減小穩態誤差。圖5是α取1,β取0.007,γ取1、2、3時μ(n)隨e(n)的變化曲線。如圖所示,γ增大,收斂速度加快,在誤差接近0時,步長減小且趨于平緩,可以有效減小穩態誤差。但經反復實驗,γ增大,穩態誤差的穩定性降低,算法的計算量增大,所以γ一般取1。圖4、圖5的縱坐標都是在10-3數量級上。

圖3 α、γ固定,β變化時的步長曲線

圖4 β、γ固定,α變化時的步長曲線

圖5 α、β固定,γ變化時的步長曲線
3 仿真分析
現采用 MATLAB仿真工具對所提算法進行仿真驗證。輸入單頻信號s=sin(0.5πt),噪聲為0均值的高斯白噪聲,信噪比為3 dB,輸入信號的抽樣點數為1 024,濾波器階數為128,統計訪真次數為100次。圖6為α取2,β取0.007,γ取1、2、3時算法的收斂曲線。由圖可以看出,γ取2、3時,收斂速度加快了,但穩態誤差的穩定性不如取1時好。圖7為α取2,γ取1,β取0.006、0.007、0.008時算法的收斂曲線。如圖所示,β取0.008時算法的收斂速度最快。圖8為β取0.008,γ取1,α取1、2、3時算法的收斂曲線。可以看出,α取2和3時收斂速度沒有顯著變化,取3時略優于取2時。

圖6 α、β固定,γ變化時的收斂曲線
經大量實驗得出,α,β,γ分別 取3,0.008,1時算法的權值達到最優。圖 9即為這里所提變步長因子μ(n)=β{1-sech[αe(n)γ]},在α取3,β取0.008,γ取1時與固定步長因子μ=0.001時的收斂曲線。由圖 9可以看出,這里所提出的變步長LMS自適應濾波算法在收斂速度上遠遠快于固定步長LMS算法,且收斂后穩態誤差失調量較小。

圖8 β、γ固定,α變化時的收斂曲線

圖9 這里算法與基本LMS算法的比較
4 與其他變步長LMS自適應算法的比較
文獻[6]根據步長因子的調整原則,構造過零點、單調平滑的函數作為算法的變步長因子。將雙曲正切函數的自變量加絕對值,得到變步長因子文獻[7]分析了現有幾種 LMS自適應算法存在的缺點,利用反正切函數提出一種新的算法,使步長和誤差之間具有更好的非線性函數關系,其變步長因子為圖 10為這里算法與上述兩種算法在參數因子均取最優值時μ(n)隨e(n)變化的函數曲線。

圖10 三種算法的步長曲線
如圖所示,新算法的函數收斂速度快,誤差穩定性好。文獻[6]中的函數雖然收斂速度快,但是誤差的穩定性差,文獻[7]中的算法穩態誤差性能較好但收斂速度慢。圖11為三種算法的收斂曲線,進一步說明現所提 LMS自適應算法在收斂速度和穩態誤差上均優于文獻[6]和文獻[7]中的LMS算法。
5 結語
根據變步長LMS算法的步長調整原則提出一種新的變步長LMS自適應算法。通過控制步長因子,在加速收斂的同時,使穩態誤差趨于平緩,有效控制了穩態誤差的失調量。這里還對參數的選擇進行了詳細分析,在α取3,β取0.008,γ取1時算法權值接近最優。通過與其他算法的比較,進一步說明了該算法的有效性,為智能天線算法的研究提供了新的思路。
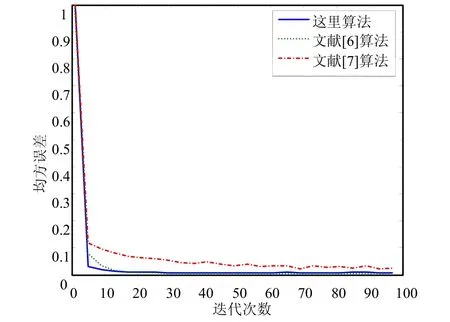
圖11 三種算法的收斂曲線
[1] CONSTANTINE A B.Antenna Theory:Analysis and Design[M].USA:Wiley Interscience,2005.
[2] 李佳靖,金榮洪,耿軍平.CDMA系統中一種快速有效的盲波束形成算法[J].西安電子科技大學學報,2007,34(06):980-985.
[3] 聶聰,呂振肅.一種新的變步長NLMS自適應算法[J].通信技術,2007,40(12):87-89.
[4] 張賢達.現代信號處理[M].北京:清華大學出版社,2002:188-192.
[5] WIDROW B,STEARNS S D.Adaptive signal processing[M].[s.l.]:Prentice-Hall,1985.
[6] 鐘慧湘,鄭莎莎,馮月萍.基于雙曲正切函數的智能天線變步長LMS算法[J].吉林大學學報,2008,46(05):935-939.
[7] 朱斌,馬艷.一種新的變步長LMS算法分析[J].計算機仿真,2008,25(09):93-95.